一种用于排爆机器人的多功能机械仿生手的制作方法
1.本实用新型具体是一种用于排爆机器人的多功能机械仿生手,涉及机械仿生相关领域。
背景技术:
2.仿生手最早是为了帮助受镇静催眠药撒利多胺危害的儿童,作为一项研究项目的一部分,看起来和动起来就像真手一样,之后机械仿生手用途广泛不但可以帮助受镇静催眠药撒利多胺危害的儿童还可以用于排爆机器人上。
3.但现有仿生手在对机械手掌进行拆卸保养维护时,不便于拆卸和安装,导致了在拆卸时炒作繁琐的问题,在安装固定后因连接块的转动而不便于转动,导致了拆装装置在转动时发生冲突的问题。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种用于排爆机器人的多功能机械仿生手。
5.本实用新型是这样实现的,构造一种用于排爆机器人的多功能机械仿生手,该装置包括机械臂、连接块、机械手掌、机械关节、拆装装置和转动机构,所述机械臂与连接块进行插接,所述连接块表面设置有拆装装置,所述拆装装置表面设置有转动机构,所述拆装装置包括旋钮、斜齿杆、斜齿轮、螺纹杆、推块、固定块、固定杆、卡块和弹簧,所述旋钮沿机械臂内壁进行转动连接,所述旋钮与斜齿杆相连接,所述斜齿杆与斜齿轮啮合转动连接,所述斜齿轮中端设置有螺纹杆,所述螺纹杆表面设置有推块,所述螺纹杆表面设置有固定块,所述连接块内部设置有固定杆,所述卡块沿固定杆表面进行滑动连接,所述固定杆表面设置有弹簧。
6.进一步的,所述连接块表面设置有机械手掌,所述机械关节通过转轴与机械手掌进行转动连接。
7.进一步的,所述转动机构包括转动框、转动套、固定环和限位块,所述固定杆与转动框相连接,所述转动套与转动框相连接,所述转动套沿固定环表面进行转动连接,所述固定环表面设置有限位块,所述限位块设置于连接块内壁。
8.进一步的,所述推块设置有两个,两个推块位于机械臂两侧,并且两个推块其结构相同。
9.进一步的,所述推块表面设置有倾斜面,倾斜面倾斜角度为一百五十六度,并且倾斜面外表面为光滑面。
10.进一步的,所述卡块下侧表面设置有斜面,斜面角度与推块倾斜面角度相同,并且卡块与推块连接处设置有凹槽。
11.进一步的,所述固定块下侧设置有凸起,凸起呈三角形,推块与固定块贴合时凸起贴合于推块表面。
12.进一步的,所述旋钮呈圆形,并且旋钮直径为六毫米,旋钮外表面为光滑无毛刺面。
13.进一步的,所述旋钮使用防锈金属材质,使旋钮具有耐用性高和防锈的效果。
14.进一步的,所述固定块使用塑料材质,使固定块具有重量轻和耐用性的效果。
15.本实用新型具有如下优点:本实用新型通过改进在此提供一种用于排爆机器人的多功能机械仿生手,与同类型设备相比,具有如下改进:
16.优点1:本实用新型所述一种用于排爆机器人的多功能机械仿生手,通过连接块表面设置有拆装装置,在需要对机械手掌进行拆卸时,转动旋钮使斜齿杆进行转动,在斜齿杆转动时斜齿轮同时进行转动,斜齿轮转动带动螺纹杆进行转动,使推块沿螺纹杆表面进行向上移动,推块滑动的同时推动卡块,使卡块沿固定杆表面滑动收缩,使弹簧受力而压缩从而产生弹力,当推块与固定块贴合时,抽出连接块,使连接块脱离机械臂,达到了便捷的对连接块进行拆卸的有益效果。
17.优点2:本实用新型所述一种用于排爆机器人的多功能机械仿生手,通过拆装装置表面设置有转动机构,在连接块转动时,在连接块转动时沿转动框表面滑动,连接块带动限位块,使固定环同时转动,在固定环转动时,沿转动套表面滑动,用于对转动框限位的作用,达到了对转动框限位的作用避免发生晃动的效果,同时不受拆卸装置影响而不便于转动的有益效果。
附图说明
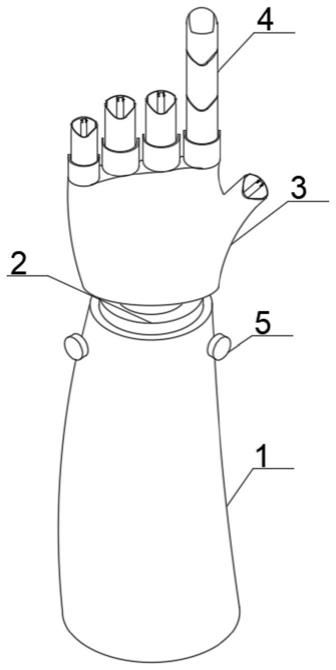
18.图1是本实用新型结构示意图;
19.图2是本实用新型机械臂正视结构示意图;
20.图3是本实用新型拆装装置正视结构示意图;
21.图4是本实用a区域局部放大图;
22.图5是本实用b区域局部放大图。
23.其中:机械臂
‑
1、连接块
‑
2、机械手掌
‑
3、机械关节
‑
4、拆装装置
‑
5、旋钮
‑
51、斜齿杆
‑
52、斜齿轮
‑
53、螺纹杆
‑
54、推块
‑
55、固定块
‑
56、固定杆
‑
57、卡块
‑
58、弹簧
‑
59、转动机构
‑
6、转动框
‑
61、转动套
‑
62、固定环
‑
63、限位块
‑
64。
具体实施方式
24.下面将结合附图1
‑
5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1和图2,本实用新型的一种用于排爆机器人的多功能机械仿生手,机械臂1、连接块2、机械手掌3、机械关节4、拆装装置5和转动机构6,机械臂1与连接块2进行插接,连接块2表面设置有机械手掌3,机械关节4通过转轴与机械手掌3进行转动连接,连接块2表面设置有拆装装置5,拆装装置5表面设置有转动机构6。
26.请参阅图3和图4,本实用新型的一种用于排爆机器人的多功能机械仿生手,拆装装置5包括旋钮51、斜齿杆52、斜齿轮53、螺纹杆54、推块55、固定块56、固定杆57、卡块58和
弹簧59,旋钮51沿机械臂1内壁进行转动连接,旋钮51用于转动的作用,旋钮51与斜齿杆52相连接,斜齿杆52与斜齿轮53啮合转动连接,斜齿轮53用于传动的作用,斜齿轮53中端设置有螺纹杆54,螺纹杆54表面设置有推块55,推块55用于解除固定的作用,螺纹杆54表面设置有固定块56,连接块2内部设置有固定杆57,固定杆57用于对卡块58限位的作用,卡块58沿固定杆57表面进行滑动连接,固定杆57表面设置有弹簧59,弹簧59用于对卡块58复位的作用;推块55设置有两个,两个推块55位于机械臂1两侧,并且两个推块55其结构相同,具有更好的固定效果;推块55表面设置有倾斜面,倾斜面倾斜角度为一百五十六度,并且倾斜面外表面为光滑面,具有更好的推动卡块58收缩的作用;卡块58下侧表面设置有斜面,斜面角度与推块55倾斜面角度相同,并且卡块58与推块55连接处设置有凹槽,具有更好的因推块55而收缩的作用;固定块56下侧设置有凸起,凸起呈三角形,推块55与固定块56贴合时凸起贴合于推块55表面,具有更好的取出作用;旋钮51呈圆形,并且旋钮51直径为六毫米,旋钮51外表面为光滑无毛刺面,具有更好的转动旋钮51的作用;旋钮51使用防锈金属材质,使旋钮51具有耐用性高和防锈的效果;固定块56使用塑料材质,使固定块56具有重量轻和耐用性的效果。
27.请参阅图5,本实用新型的一种用于排爆机器人的多功能机械仿生手,转动机构6包括转动框61、转动套62、固定环63和限位块64,固定杆57与转动框61相连接,转动框61用于固定于固定杆57的作用,转动套62与转动框61相连接,转动套62沿固定环63表面进行转动连接,固定环63用于导向的作用,固定环63表面设置有限位块64,限位块64设置于连接块2内壁,限位块64用于对固定环63限位固定的作用。
28.本实用新型通过改进提供一种用于排爆机器人的多功能机械仿生手,其工作原理如下;
29.第一,在需要排爆时,将机械臂1与配套设备进行安装,通过配套的设备驱动机械臂1连接块2用于连接的作用,机械手掌3用于对机械关节4的安装作用,机械关节4用于对物品进行握住的作用;
30.第二,在需要对机械手掌3进行拆卸时,转动旋钮51,旋钮51转动时斜齿杆52进行转动,由于斜齿轮53与斜齿杆52啮合转动连接,所以在斜齿杆52转动时斜齿轮53同时进行转动,斜齿轮53转动带动螺纹杆54进行转动,因推块55与螺纹杆54螺纹连接,所以在螺纹杆54转动时推块55沿螺纹杆54表面进行向上移动,推块55滑动的同时推动卡块58,使卡块58沿固定杆57表面滑动收缩,同时对弹簧59进行施力,弹簧59受力而压缩从而产生弹力,当推块55与固定块56贴合时,抽出连接块2,使连接块2脱离机械臂1,达到了便捷的对连接块2进行拆卸的有益效果;
31.第三,在连接块2转动时,由于卡块58限位于固定块56表面,所以在连接块2转动时沿转动框61表面滑动,连接块2带动限位块64,使其固定环63同时转动,因为转动套62与固定环63滑动连接,所以在固定环63转动时沿转动套62表面滑动,用于对转动框61限位的作用,达到了对转动框61限位的作用避免发生晃动的效果,同时不受拆卸装置5影响而不便于转动的有益效果。
32.本实用新型通过改进提供一种用于排爆机器人的多功能机械仿生手,通过连接块2表面设置有拆装装置5,在需要对机械手掌3进行拆卸时,转动旋钮51使斜齿杆52进行转动,在斜齿杆52转动时斜齿轮53同时进行转动,斜齿轮53转动带动螺纹杆54进行转动,使推
块55沿螺纹杆54表面进行向上移动,推块55滑动的同时推动卡块58,使卡块58沿固定杆57表面滑动收缩,使弹簧59受力而压缩从而产生弹力,当推块55与固定块56贴合时,抽出连接块2,使连接块2脱离机械臂1,达到了便捷的对连接块2进行拆卸的有益效果;通过拆装装置5表面设置有转动机构6,在连接块2转动时,在连接块2转动时沿转动框61表面滑动,连接块2带动限位块64,使固定环63同时转动,在固定环63转动时,沿转动套62表面滑动,用于对转动框61限位的作用,达到了对转动框61限位的作用避免发生晃动的效果,同时不受拆卸装置5影响而不便于转动的有益效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1