一种工业机器人加工用定位旋转座的制作方法
1.本实用新型涉及工业机器人加工技术领域,具体是指一种工业机器人加工用定位旋转座。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
3.工业机器人在用于加工过程中,基本都需要对工业机器人能够进行旋转定位操作,现有的旋转定位结构的稳固度不够,没有任何支撑效果,长久使用,易出现松动,且如若断电,其便丧失了原有的定位功能。
技术实现要素:
4.本实用新型为了解决上述的各种问题,提供了一种支撑效果较好、不易松动、转动定位可靠的工业机器人加工用定位旋转座。
5.为解决上述技术问题,本实用新型提供的技术方案为:一种工业机器人加工用定位旋转座,包括安装板,安装板上面一体成型有座壳,座壳内安装有旋转定位结构,旋转定位结构上安装有伸出座壳上面的工业机器人底柱,工业机器人底柱上安装有支撑转动结构;
6.旋转定位结构包括通过螺栓固定于座壳上面一角处的电机,电机输出端伸入座壳内的一端上连接有短轴一,短轴一上套接有偏心轮,座壳内部底面上一体成型有短轴二和短轴三,短轴二上套接有棘轮,工业机器人底柱一体成型于棘轮上面,短轴三上转动有楔形块,楔形块上一体成型有拨齿,楔形块另一端铰接有棘爪,棘爪与楔形块铰接处缠绕有双向弹簧,棘爪另一端卡入棘轮的两齿之间,偏心轮与楔形块的一端相接触。
7.作为改进,支撑转动结构包括通过螺栓固定于工业机器人底柱外侧面上的支撑筒。
8.作为改进,支撑筒下面开有若干个凹槽,凹槽内均转动有转轮,转轮与座壳上面相接触。
9.作为改进,座壳上面开有供转轮运动的环形槽。
10.作为改进,楔形块的另一端处转动有辅助轮,辅助轮与偏心轮相接触。
11.作为改进,工业机器人底柱与座壳相接触处安装有轴承。
12.作为改进,电机为步进电机。
13.本实用新型与现有技术相比的优点在于:本实用新型在使用时,旋转定位结构的设置,可通过棘轮结构对工业机器人底柱进行转动以及定位卡死操作,较为稳固可靠且可通过调整棘轮的轮齿密度来控制可变换角度的多少;支撑转动结构的设置,可对工业机器
人底柱进行稳固的支撑操作,避免工业机器人本身工作时的偏重,造成连接处的松动;转轮和环形槽的设置,可使支撑转动结构既可进行支撑操作,也使其转动时更加顺畅。
附图说明
14.图1是本实用新型一种工业机器人加工用定位旋转座的立体结构示意图。
15.图2是本实用新型一种工业机器人加工用定位旋转座的主视结构示意图。
16.图3是本实用新型一种工业机器人加工用定位旋转座的俯视结构示意图。
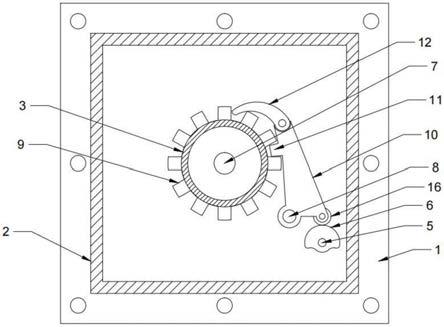
17.图4是本实用新型一种工业机器人加工用定位旋转座的俯视内部结构示意图。
18.如图所示:1、安装板;2、座壳;3、工业机器人底柱;4、电机;5、短轴一;6、偏心轮;7、短轴二;8、短轴三;9、棘轮;10、楔形块;11、拨齿;12、棘爪;13、支撑筒;14、转轮;15、环形槽;16、辅助轮;17、轴承。
具体实施方式
19.下面结合附图对本实用新型做进一步的详细说明。
20.结合附图1至附图4,一种工业机器人加工用定位旋转座,包括安装板1,安装板1上面一体成型有座壳2,旋转定位结构安装在座壳2内,旋转定位结构上安装有伸出座壳2上面的工业机器人底柱3,工业机器人底柱3上安装有支撑转动结构;
21.旋转定位结构包括通过螺栓固定于座壳2上面一角处的电机4(步进电机),电机4输出端伸入座壳2内的一端上连接有短轴一5,短轴一5上套接有偏心轮6,座壳2内部底面上一体成型有短轴二7和短轴三8,短轴二7上套接有棘轮9,工业机器人底柱3一体成型于棘轮9上面,短轴三8上转动有楔形块10,楔形块10上一体成型有拨齿11,楔形块10另一端铰接有棘爪12,棘爪12与楔形块10铰接处缠绕有双向弹簧,棘爪12另一端卡入棘轮9的两齿之间,偏心轮6与楔形块10的一端相接触。
22.支撑转动结构包括通过螺栓固定于工业机器人底柱3外侧面上的支撑筒13。
23.支撑筒13下面开有若干个凹槽,凹槽内均转动有转轮14,转轮14与座壳2上面相接触。
24.座壳2上面开有供转轮14运动的环形槽15。
25.楔形块10的另一端处转动有辅助轮16,辅助轮16与偏心轮6相接触。
26.工业机器人底柱3与座壳2相接触处安装有轴承17。
27.本实用新型的具体实施方式:本实用新型在使用时,即当需要对工业机器人底柱3进行转动时,可启动通过控制按钮(图上未画出)控制电机4转动,带动偏心轮6转动,从而通过偏心轮6的偏心,从而带动楔形块10绕短轴三8转动,使拨齿11对棘轮9拨动,从而带动工业机器人底柱3转动,由棘爪12进行卡紧操作,防止其因断电,无意碰撞转动;工业机器人底柱3在转动过程中,支撑筒13在支撑的同时,也进行转动。
28.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.一种工业机器人加工用定位旋转座,包括安装板(1),其特征在于:所述安装板(1)上面一体成型有座壳(2),所述座壳(2)内安装有旋转定位结构,所述旋转定位结构上安装有伸出所述座壳(2)上面的工业机器人底柱(3),所述工业机器人底柱(3)上安装有支撑转动结构;所述旋转定位结构包括通过螺栓固定于所述座壳(2)上面一角处的电机(4),所述电机(4)输出端伸入所述座壳(2)内的一端上连接有短轴一(5),所述短轴一(5)上套接有偏心轮(6),所述座壳(2)内部底面上一体成型有短轴二(7)和短轴三(8),所述短轴二(7)上套接有棘轮(9),所述工业机器人底柱(3)一体成型于所述棘轮(9)上面,所述短轴三(8)上转动有楔形块(10),所述楔形块(10)上一体成型有拨齿(11),所述楔形块(10)另一端铰接有棘爪(12),所述棘爪(12)与所述楔形块(10)铰接处缠绕有双向弹簧,所述棘爪(12)另一端卡入所述棘轮(9)的两齿之间,所述偏心轮(6)与所述楔形块(10)的一端相接触。2.根据权利要求1所述的一种工业机器人加工用定位旋转座,其特征在于:所述支撑转动结构包括通过螺栓固定于所述工业机器人底柱(3)外侧面上的支撑筒(13)。3.根据权利要求2所述的一种工业机器人加工用定位旋转座,其特征在于:所述支撑筒(13)下面开有若干个凹槽,所述凹槽内均转动有转轮(14),所述转轮(14)与所述座壳(2)上面相接触。4.根据权利要求3所述的一种工业机器人加工用定位旋转座,其特征在于:所述座壳(2)上面开有供所述转轮(14)运动的环形槽(15)。5.根据权利要求1所述的一种工业机器人加工用定位旋转座,其特征在于:所述楔形块(10)的另一端处转动有辅助轮(16),所述辅助轮(16)与所述偏心轮(6)相接触。6.根据权利要求1所述的一种工业机器人加工用定位旋转座,其特征在于:所述工业机器人底柱(3)与所述座壳(2)相接触处安装有轴承(17)。7.根据权利要求1所述的一种工业机器人加工用定位旋转座,其特征在于:所述电机(4)为步进电机。
技术总结
本实用新型公开了一种工业机器人加工用定位旋转座,包括安装板,安装板上面一体成型有座壳,座壳内安装有旋转定位结构,旋转定位结构上安装有伸出座壳上面的工业机器人底柱,工业机器人底柱上安装有支撑转动结构。本实用新型的优点:支撑效果较好、不易松动、转动定位可靠。可靠。可靠。
技术研发人员:梁飞 黄志智 覃俊伟 郑传唠 莫宝海 关钧文
受保护的技术使用者:柳州市灿晟机械设备有限公司
技术研发日:2021.07.01
技术公布日:2021/11/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1