基于双目视觉的机器人空间位置重复性和准确度测量系统的制作方法
1.本实用新型属于机器人位置精度测量技术领域,具体涉及一种基于双目视觉的机器人空间位置重复性和准确度测量系统。
背景技术:
2.机器人的位置误差是衡量机器人性能的重要指标,也很大程度上决定了市场占有率,研究表明90%的位置误差来源于机器人的运动学几何参数精度误差。
3.为了识别位置误差,目前常用的方法是:一是采用激光跟踪仪以及安装在机器人末端的靶球或t
‑
maci进行位置精度测量,价格不菲;二是使用拉线式设备配以dynalog测试软件的专业测试设备,此设备昂贵。采用激光跟踪仪以及安装在机器人末端的靶球或t
‑
mac精度较高,但受限于靶球和t
‑
mac可能出现断光,且测试流程长,测量空间受限;使用拉线式设备配以dynalog测试软件的专业测试设备,体积庞大,设备笨重,结构原因使得测量空间有限。
技术实现要素:
4.针对现有技术的缺陷,本实用新型提供了一种基于双目视觉的机器人空间位置重复性和准确度测量系统,使用两个对称的相机对机器人进行空间位置的测量,具有操作简单、测量范围大、实用性强的优点。
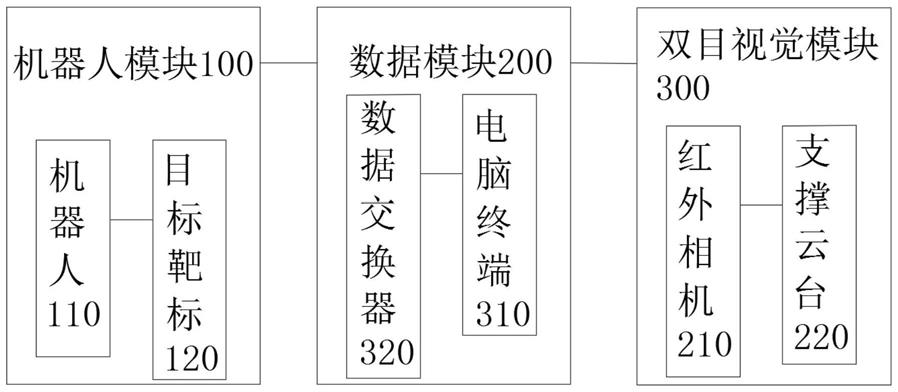
5.为了实现上述目的,本实用新型提供了一种基于双目视觉的机器人空间位置重复性和准确度测量系统,其包括机器人模块、双目视觉模块和数据模块;
6.机器人模块包括机器人和安装于机器人末端的目标靶标;
7.双目视觉模块包括两个红外相机、具有旋转和升降功能的支撑云台,红外相机设置于支撑云台上,并且两个红外相机对称设置于机器人的正前方空间区域的两侧并分别朝向机器人;
8.数据模块包括电脑终端和数据交换器,电脑终端通过数据交换器和红外相机、机器人之间数据连接。
9.本实用新型中两个红外相机优选对称设置于机器人的正前方一立方体空间区域的两侧并分别朝向机器人,这样设置的目的在于两个红外相机的视场范围能够完全包括上述位于机器人正前方的立方体空间区域,便于更好地进行测量点位置数据的获取。
10.作为本实用新型的另一种具体实施方案,目标靶标为长型,其包括杆和圆形靶球,圆形靶球设置于杆上且圆形靶球能够围绕杆进行自转。
11.作为本实用新型的另一种具体实施方案,目标靶标还包括转动座,杆设置于转动座上,其中杆与转动座的回转轴线相垂直。
12.作为本实用新型的另一种具体实施方案,支撑云台包括回转台和升降支撑架,回转台设置于升降架上,红外相机设置于回转台上。
13.作为本实用新型的另一种具体实施方案,升降支撑架为三脚架。
14.作为本实用新型的另一种具体实施方案,数据交换器为交换机。
15.本实用新型具备以下有益效果:
16.本实用新型采用两个红外相机进行机器人位置精度的测量,双目视觉的视场范围大,可测量空间大,不受断光和设备的影响,测量空间无需多次调整;测量效率大大提升,可应用多种机器人的测量。
17.此外本实用新型通过具有旋转和升降功能支撑云台进行两个红外相机的安装,其中支撑云台优选与电脑终端进行连接,以将其准确位置数据传递给电脑终端。
18.下面结合附图对本实用新型作进一步的详细说明。
附图说明
19.图1是本实用新型实施例1中的连接框图;
20.图2是本实用新型实施例1中的布局示意图;
21.图3是本实用新型实施例1中显示两个红外相机相对位置的示意图;
22.图4是本实用新型实施例1中目标靶标的放大示意图。
具体实施方式
23.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和具体实施方式对本实用新型进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
24.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用其他不同于在此描述的其他方式来实施,因此,本实用新型的保护范围并不限于下面公开的具体实施例的限制。
25.实施例1
26.本实施例提供了一种基于双目视觉的机器人空间位置重复性和准确度测量系统,如图1
‑
4所示,其包括机器人模块100、双目视觉模块200和数据模块300;
27.机器人模块100包括机器人110和安装于机器人110末端的目标靶标120;
28.双目视觉模块200包括两个红外相机210、具有旋转和升降功能的支撑云台220,红外相机210设置于支撑云台220上,并且两个红外相机210对称设置于机器人110的正前方空间区域的两侧并分别朝向机器人110,其中两个红外相机210优选对称设置于机器人110的正前方一立方体空间区域r的两侧并分别朝向机器人110,如图3所示;
29.本实施例中,通过两个红外相机210对机器人110的正前方一立方体空间区域r进行特定位置点的测量,两个红外相机210的视场范围完全包含该立方体空间区域r,彻底避免测量点超出视场范围或者测量误差较大所导致的无法消除的测量误差的现象,可以确保在机器人110的任一运动情况下其上的目标靶标120都可以进行有效测量,尤其适用于多轴机器人的测量。
30.数据模块300包括电脑终端310和数据交换器320,数据交换器320优选为交换机,电脑终端310通过数据交换器320和两个红外相机210、机器人110之间数据连接。
31.本实施例中的支撑云台220包括回转台221和升降支撑架222,回转台221设置于升降支撑架222上,红外相机210设置于回转台221上,其中升降支撑架222优选为三脚架。
32.如图4所示,本实施例中的目标靶标120为长型,其包括转动座121、杆122和圆形靶球123,转动座121以转动形式连接在机器人110的末端,杆122设置于转动座121上,圆形靶球123设置于杆122上且圆形靶球123能够围绕杆122进行自转,其中杆122与转动座121的回转轴线相垂直。
33.本实用新型所提供系统的测量过程为:
34.1)以机器人机座为零点坐标,建立机器人坐标系,获得目标靶标(圆形靶球)的坐标值,并将该坐标值经过数据交换器传输至电脑终端;
35.2)对已安装在预定位置处的两个红外相机进行标定,建立测量坐标系,并对所建立的测量坐标系进行标定,其中例如采用t型标定杆对两个红外相机的相对位置进行标定,例如采用l型标定杆对测量坐标系进行标定;
36.3)按照标准gb/t12642的要求,通过电脑终端编辑机器人相关测量点的指令程序,并控制启动机器人,对目标靶标进行30次循环测量,获得一系列测量值;
37.4)通过电脑终端利用坐标对齐的转换关系进行计算获取测量点在测量坐标系下的对应坐标值,将经过测量获得的一系列测量值与对应坐标值进行比对,得到机器人的空间位置重复性和空间准确度结果,测量完成。
38.虽然本实用新型以较佳实施例揭露如上,但并非用以限定本实用新型实施的范围。任何本领域的普通技术人员,在不脱离本实用新型的发明范围内,当可作些许的改进,即凡是依照本实用新型所做的同等改进,应为本实用新型的范围所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1