网材的自动热切割装置的制作方法
1.本实用新型属于网材的切割加工设备领域,具体涉及一种网材的自动热切割装置。
背景技术:
2.目前,在网材的加工生产中,往往存在原始网材尺寸与应用所需尺寸不匹配的问题,故需对原始网材尺寸进行加工处理。在现有的网材切割技术中,一般采用人工剪裁和激光切割这两种加工方式来进行解决:对于人工剪裁而言,其往往达不到网材规定尺寸的剪裁精度,导致生产效率低下,此外人工剪裁所需人力成本较高;而对于激光切割而言,虽然网材的剪裁精度得到了保证,但激光切割机的高价格和高使用成本却使很多生产企业望而却步。
技术实现要素:
3.本实用新型所要解决的技术问题是:提供了一种网材的自动热切割装置,本装置一方面保证了网材的剪裁精度,另一方面大大降低了生产成本。
4.为解决上述技术问题本实用新型所采用的技术方案是:网材的自动热切割装置包括机架、纵切装置、横切装置和控制装置,所述纵切装置、横切装置与控制装置电气连接,所述机架的顶部设置有第一级平台,所述第一级平台包括第一安装部、第二安装部和支撑板,所述第一安装部与第二安装部相对设置,支撑板位于第一安装部和第二安装部之间,支撑板的一侧壁与第一安装部连接,支撑板的另一侧壁与第二安装部连接,支撑板的顶部用于支撑网材;
5.所述横切装置包括第一无杆气缸,第一无杆气缸包括第一无杆气缸本体和滑块,第一无杆气缸本体的一端与第一安装部连接,第一无杆气缸本体的另一端与第二安装部连接,所述滑块与第一无杆气缸本体滑动配合,滑块的底部设有第三连接部,所述第三连接部用于连接横切热切刀,滑块带动第三连接部进行直线往复运动;
6.所述纵切装置包括第一气缸和第二气缸,所述第一气缸的一端连接在第一安装部上,第一气缸的输出端设有第一连接部,所述第一连接部用于连接第一纵切热切刀,第一气缸的输出端驱动第一连接部进行升降动作;所述第二气缸的一端连接在第二安装部上,第二气缸的输出端设有第二连接部,所述第二连接部用于连接第二纵切热切刀,第二气缸的输出端驱动第二连接部进行升降动作,所述第一连接部与第二连接部相对设置。
7.进一步地,还包括固定装置和压网装置,所述固定装置包括第一固定部、第二固定部和固定板,第一固定部连接在第一安装部上,第二固定部连接在第二安装部上,所述固定板的一端与第一固定部连接,固定板的另一端与第二固定部连接;
8.所述压网装置包括第三气缸,第三气缸的一端连接在固定板上,第三气缸的输出端设有第四连接部,所述第四连接部通过第三气缸的输出端的驱动进行升降动作,第四连接部用于压住网材。
9.进一步地,包括胶垫,所述胶垫设置于第四连接部中朝向与网材接触的端面上。
10.进一步地,第一无杆气缸本体的一端与第一固定部连接,第一无杆气缸本体的另一端与第二固定部连接。
11.进一步地,还包括拉网装置,所述机架的内部设置有第二级平台;拉网装置包括第二无杆气缸和第四气缸,所述第二无杆气缸包括第二无杆气缸本体和第二滑块,第二无杆气缸本体的底部与第二级平台的顶部相连接,所述第二滑块与第二无杆气缸本体滑动配合,第二滑块的顶部设有拉网垫板,所述第四气缸连接于第二滑块的侧壁上,第四气缸的输出端设有拉网压板,所述拉网垫板与拉网压板之间形成拉网腔,所述拉网腔可调节。
12.进一步地,包括拖链,所述拖链的一端与第二级平台连接,拖链的另一端与第二滑块连接。
13.进一步地,所述机架上设有导向轴,所述导向轴用于网材进料时的导向。
14.进一步地,所述导向轴上设置有限位块。
15.进一步地,包括第一位置传感器、第二位置传感器和第三位置传感器,所述第一位置传感器、第二位置传感器和第三位置传感器与控制装置电气连接;所述第一位置传感器连接在第一安装部上,第一位置传感器的位置与第一连接部位置对应;所述第二位置传感器连接在第二安装部上,第二位置传感器的位置与第二连接部位置对应;所述第三位置传感器连接在第一安装部或第二安装部上,第三位置传感器的位置与第三连接部的位置对应。
16.进一步地,包括光栅传感器,所述光栅传感器与控制装置电气连接,所述光栅传感器的一端与第一安装部连接,光栅传感器的另一端与第二安装部连接。
17.本实用新型引入机架、纵切装置、横切装置和控制装置,所述纵切装置、横切装置与控制装置电气连接。在本实用新型中,通过纵切装置与横切装置的联动,能够稳定实现对网材的精确裁剪。本实用新型还可通过调节机架两端纵切装置之间的安装距离来实现切网尺寸的大小变化,具有很强的实用性和适用性。本实用新型的整体机架全部采用铝型材,网材切割方面采用热切割加工技术,采用的热切刀片使用寿命长,较激光切割而言大幅度降低了生产成本。
附图说明
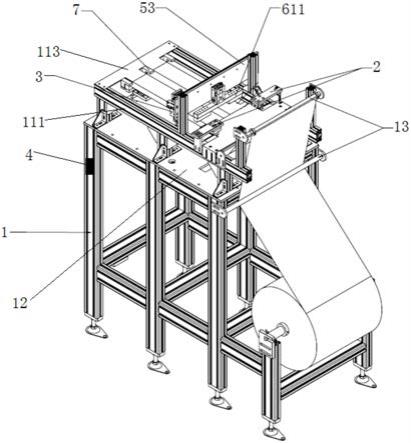
18.图1为本实用新型的工作状态结构示意图;
19.图2为本实用新型的结构示意图;
20.图3为基于图2的a区域放大结构示意图;
21.图4为横切装置结构示意图;
22.图5为拉网装置结构示意图;
23.图中标记为:
24.1、机架;111、第一安装部;112、第二安装部;113、支撑板;12、第二级平台;13、导向轴;131、限位块;2、纵切装置;21、第一气缸;211、第一连接部;22、第二气缸;221、第二连接部;3、横切装置;311、第一无杆气缸本体;312、滑块;313、第三连接部;4、控制装置;51、第一固定部;52、第二固定部;53、固定板;61、第三气缸;611、第四连接部;7、拉网装置;711、第二无杆气缸本体;712、第二滑块;713、拉网垫板;72、第四气缸;721、拉网压板;8、胶垫;9、光栅
传感器;10、拖链;100、第一位置传感器;200、第二位置传感器;300、第三位置传感器。
具体实施方式
25.下面结合附图及实施例对本实用新型作进一步说明。在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。其中,术语“第一位置”和“第二位置”为两个不同的位置。
26.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
27.如图1至图5所示,网材的自动热切割装置包括机架1、纵切装置2、横切装置3和控制装置4,所述纵切装置2、横切装置3与控制装置4电气连接,所述机架1的顶部设置有第一级平台,所述第一级平台包括第一安装部111、第二安装部112和支撑板113,所述第一安装部111与第二安装部112相对设置,支撑板113位于第一安装部111和第二安装部112之间,支撑板113的一侧壁与第一安装部111连接,支撑板113的另一侧壁与第二安装部112连接,支撑板113的顶部用于支撑网材;
28.所述横切装置3包括第一无杆气缸,第一无杆气缸包括第一无杆气缸本体311和滑块312,第一无杆气缸本体311的一端与第一安装部111连接,第一无杆气缸本体311的另一端与第二安装部112连接,所述滑块312与第一无杆气缸本体311滑动配合,滑块312的底部设有第三连接部313,所述第三连接部313用于连接横切热切刀,滑块312带动第三连接部313进行直线往复运动;
29.所述纵切装置2包括第一气缸21和第二气缸22,所述第一气缸21的一端连接在第一安装部111上,第一气缸21的输出端设有第一连接部211,所述第一连接部211用于连接第一纵切热切刀,第一气缸21的输出端驱动第一连接部211进行升降动作;所述第二气缸22的一端连接在第二安装部112上,第二气缸22的输出端设有第二连接部221,所述第二连接部221用于连接第二纵切热切刀,第二气缸22的输出端驱动第二连接部221进行升降动作,所述第一连接部211与第二连接部221相对设置。
30.本实用新型的工作过程为:控制装置4启动,纵切装置2提升一定高度,即第一气缸21的输出端驱动第一连接部211进行抬升动作,第二气缸22的输出端驱动第二连接部221进行抬升动作;
31.之后,进行拉网动作,所述拉网动作可通过人工或利用机械手等外部装置实现,在进行拉网动作的同时,纵切装置2下降,对网材进行纵切动作,即第一气缸21的输出端驱动第一连接部211进行下降动作,第二气缸22的输出端驱动第二连接部221进行下降动作;所述第一连接部211用于连接第一纵切热切刀,所述第二连接部221用于连接第二纵切热切刀,第一纵切热切刀和第二纵切热切刀对网材两边进行切割动作;
32.待拉动网材到既定位置后,控制装置控制纵切装置2抬升,同时控制横切装置3进行横切动作,所述横切动作具体为滑块312带动第三连接部313进行直线往复运动,第三连接部313用于连接横切热切刀,所述直线往复动作在于将网材之间进行切割分离。此时,实现了对网材的精确裁剪。
33.为进一步加强网材的裁剪精度,实现自动压网动作,保证网材的稳定进料,引入固定装置和压网装置,所述固定装置包括第一固定部51、第二固定部52和固定板53,第一固定部51连接在第一安装部111上,第二固定部52连接在第二安装部112上,所述固定板53的一端与第一固定部51连接,固定板53的另一端与第二固定部52连接;
34.所述压网装置包括第三气缸61,第三气缸61的一端连接在固定板53上,第三气缸61的输出端设有第四连接部611,所述第四连接部611通过第三气缸61的输出端的驱动进行升降动作,第四连接部611用于压住网材。
35.引入固定装置和压网装置后,本实用新型的工作过程为:控制装置4启动,压网装置的第四连接部611将网材紧实平整的压在支撑板113上,纵切装置2提升一定高度,即第一气缸21的输出端驱动第一连接部211进行抬升动作,第二气缸22的输出端驱动第二连接部221进行抬升动作;
36.之后,进行拉网动作,所述拉网动作可通过人工或利用机械手等外部装置实现,当拉网部分稳定夹住网材后,控制装置控制第四连接部611抬升,同时纵切装置2下降,对网材进行纵切动作,即第一气缸21的输出端驱动第一连接部211进行下降动作,第二气缸22的输出端驱动第二连接部221进行下降动作;所述第一连接部211用于连接第一纵切热切刀,所述第二连接部221用于连接第二纵切热切刀,第一纵切热切刀和第二纵切热切刀对网材两边进行切割动作;
37.待拉动网材到既定位置后,控制装置控制纵切装置2抬升,第四连接部611下降并将网材紧实平整的压在支撑板113上,之后,控制装置控制横切装置3进行横切动作,所述横切动作具体为滑块312带动第三连接部313进行直线往复运动,第三连接部313用于连接横切热切刀,所述直线往复动作在于将网材之间进行切割分离。此时,实现了对网材的精确裁剪。
38.为保证网材表面质量,引入胶垫8,所述胶垫8设置于第四连接部611中朝向与网材接触的端面上。
39.为明确第一无杆气缸本体311的其他安装位置,所述第一无杆气缸本体311的一端与第一固定部51连接,第一无杆气缸本体311的另一端与第二固定部52连接。
40.除手动拉网外,为实现拉网动作的自动化进行,引入拉网装置7,所述机架1的内部设置有第二级平台12;拉网装置7包括第二无杆气缸和第四气缸72,所述第二无杆气缸包括第二无杆气缸本体711和第二滑块712,第二无杆气缸本体711的底部与第二级平台12的顶部相连接,所述第二滑块712与第二无杆气缸本体711滑动配合,第二滑块712的顶部设有拉网垫板713,所述第四气缸72连接于第二滑块712的侧壁上,第四气缸72的输出端设有拉网压板721,所述拉网垫板713与拉网压板721之间形成拉网腔,所述拉网腔可调节。
41.第四气缸72的输出端通过调节拉网压板721和拉网垫板713的相对距离,来调节拉网腔的大小。
42.为加强对拉网行程的保护,引入拖链10,所述拖链10的一端与第二级平台12连接,
拖链10的另一端与第二滑块712连接。
43.为加强对网材进料时的导向,所述机架1上设有导向轴13;进一步地,为加强对导向轴13上网材的限位,所述导向轴13上设置有限位块131。限位块131的引入避免了网材进料时的偏移。
44.为加强对网材切割位置的判断,更好地实现联动控制及相关动作,引入第一位置传感器100、第二位置传感器200和第三位置传感器300,所述第一位置传感器100、第二位置传感器200和第三位置传感器300与控制装置4电气连接;
45.所述第一位置传感器100连接在第一安装部111上,第一位置传感器100的位置与第一连接部211位置对应;所述第二位置传感器200连接在第二安装部112上,第二位置传感器200的位置与第二连接部221位置对应;所述第三位置传感器300连接在第一安装部111或第二安装部112上,第三位置传感器300的位置与第三连接部313的位置对应。
46.上述第一位置传感器100用于检测第一连接部211的位置;第二位置传感器200用于检测第二连接部221的位置;第三位置传感器300用于检测第三连接部313的位置。
47.为加强对拉网状态进行检测,引入光栅传感器9,所述光栅传感器9与控制装置4电气连接,所述光栅传感器9的一端与第一安装部111连接,光栅传感器9的另一端与第二安装部112连接。当光栅传感器9检测网材正常进料时,控制装置4正常运行;当光栅传感器9检测网材进料异常时,控制装置4停止运行。为方便判断光栅传感器9的工作状态,还可以引入提示装置,所述提示装置、光栅传感器9与控制装置4电气连接。
48.在本网材的自动热切割装置中,所有运动装置可安装液压缓冲器和机械限位螺栓,从而来保证机构的安全性和使用寿命。此外,本装置还可以结合机械手自动取材,避免人工挂网时开关门的繁琐与进入模具区的危险性。
49.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型的作其他形式的限制,任何熟悉本专业的技术人员可以利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例,但是凡是未脱离本实用新型技术方案的内容,依据本实用新型技术方案的实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1