三轴旋转机械手的制作方法
1.本实用新型涉及工件分拣技术领域,尤其涉及一种三轴旋转机械手。
背景技术:
2.对于某些小工件而言,为了使得其能够良好地安装于所应用的产品中,需要对其不同面的尺寸进行检测,以分拣出合格品,并分离不合格品。
3.然而,某些小工件产品形状并不规则,现有的分拣装置无法灵活地对小工件的各个表面分别进行检测,进而影响了工件检测、分拣的效率。因此,针对上述问题,有必要提出进一步地解决方案。
技术实现要素:
4.本实用新型旨在提供一种三轴旋转机械手,以克服现有技术中存在的不足。
5.为解决上述技术问题,本实用新型的技术方案是:
6.一种三轴旋转机械手,其包括:机械手本体、三轴驱动模组以及旋转模组;
7.所述机械手本体包括:驱动气缸、传动连杆以及若干旋转式吸嘴组件;
8.所述传动连杆的一端与所述驱动气缸的输出端传动连接,各旋转式吸嘴组件间隔设置,所述驱动气缸通过所述传动连杆带动若干旋转式吸嘴组件进行同步旋转运动;
9.所述旋转模组带动所述机械手本体进行自转,所述三轴驱动模组带动所述机械手本体、旋转模组整体地进行三维运动。
10.作为本实用新型三轴旋转机械手的改进,所述传动连杆的下端设置有与若干旋转式吸嘴组件对应设置的开槽,各旋转式吸嘴组件的拨块延伸至传动连杆的下端的开槽中,所述驱动气缸工作时,所述传动连杆通过拨块带动相应的旋转式吸嘴组件进行同步旋转。
11.作为本实用新型三轴旋转机械手的改进,所述机械手本体还包括第一导向机构;
12.所述第一导向机构位于驱动气缸和传动连杆之间,其包括:滑轨以及沿滑轨进行滑动的滑块,所述滑块进一步与所述传动连杆相连接。
13.作为本实用新型三轴旋转机械手的改进,所述任一旋转吸嘴组件包括:气杆、拨块、衬套、轴承组以及吸嘴;
14.所述气杆的上端连接有接头,下端为一法兰盘结构,所述衬套套装于所述气杆上,且所述衬套与基座之间还设置有所述轴承组;所述传动连杆通过各拨块带动若干旋转式吸嘴组件进行同步旋转运动。
15.作为本实用新型三轴旋转机械手的改进,所述拨块一端套装于所述气杆的上部,另一端延伸至所述传动连杆上对应的开槽中。
16.作为本实用新型三轴旋转机械手的改进,各吸嘴表面还设置有反射层。
17.作为本实用新型三轴旋转机械手的改进,所述反射层为镀铬层。
18.作为本实用新型三轴旋转机械手的改进,所述旋转模组包括一旋转电机,所述旋转电机的输出端与所述机械手本体传动连接。
19.作为本实用新型三轴旋转机械手的改进,所述三轴驱动模组包括:x轴驱动模组、y轴驱动模组以及z轴驱动模组;
20.所述x轴驱动模组包括一x轴直线电机;所述x轴直线电机带动所述y轴驱动模组、z轴驱动模组、旋转模组以及机械手本体整体地沿所述x轴方向进行平移运动;
21.所述y轴驱动模组包括一y轴直线电机;所述y轴直线电机所在的底座与所述x轴直线电机传动连接,所述y轴直线电机带动所述z轴驱动模组、旋转模组以及机械手本体整体地沿y轴方向进行平移运动;
22.所述z轴驱动模组包括包括一z轴直线电机,所述z轴直线电机所在的底座与所述y轴直线电机传动连接,所述z轴驱动模组带动所述旋转模组以及机械手本体整体地沿z轴方向进行平移运动。
23.与现有技术相比,本实用新型的有益效果是:本实用新型的三轴旋转机械手能够根据检测的需求,进行整体的自转并配合独立吸嘴组件的自转,进而方便调节吸取工件产品的角度,有利于对工件产品的各面分别进行尺寸检测,克服了现有分拣装置中检测不便的问题。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
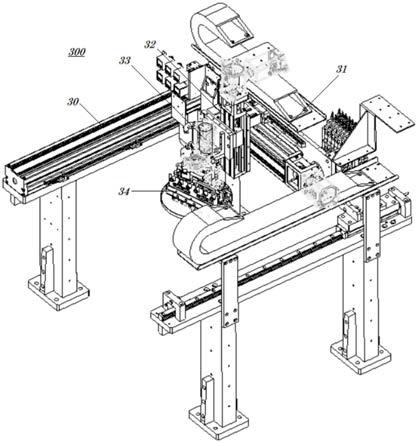
25.图1为本实用新型三轴旋转机械手一实施例的立体示意图;
26.图2为图1中机械手本体的立体放大示意图;
27.图3为图2中旋转式吸嘴组件的立体分解示意图。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.本实用新型一实施例提供一种三轴旋转机械手,其适用于吸取并周转小工件产品,其通过公转以及自转,调整小工件产品的角度,有利于对工件产品的各面分别进行尺寸检测,克服了现有分拣装置中检测不便的问题。
30.如图1所示,本实施例的三轴旋转机械手300包括:机械手本体34、三轴驱动模组35以及旋转模组33。
31.三轴驱动模组35用于带动机械手本体34、旋转模组33整体地进行三维运动,其包括:x轴驱动模组30、y轴驱动模组3以及z轴驱动模组32。
32.其中,x轴驱动模组30用于带动y轴驱动模组31、z轴驱动模组32、旋转模组33以及机械手本体34整体地沿x轴方向进行平移运动。具体地,x轴驱动模组30包括:x轴直线电机和x轴导轨。x轴直线电机与x轴导轨平行设置,并安装于各自的底座上。
33.y轴驱动模组31用于带动z轴驱动模组32、旋转模组33以及机械手本体34整体地沿y轴方向进行平移运动。具体地,y轴驱动模组31包括一y轴直线电机。该y轴直线电机所在的底座一端与x轴直线电机传动连接,另一端通过滑块沿x轴导轨进行滑动。
34.z轴驱动模组32用于带动旋转模组33以及机械手本体34整体地沿z轴方向进行平移运动。具体地,z轴驱动模组32包括一z轴直线电机。该z轴直线电机所在的底座与y轴直线电机传动连接。
35.旋转模组33用于带动机械手本体34整体进行自转。具体地,旋转模组33包括一旋转电机,该旋转电机的输出端与机械手本体34传动连接。
36.从而,在各驱动模组及旋转模组33的带动下,机械手本体34可运动至相应的取料位置,并抓取上游来料治具上的工件产品。同时,整体旋转一定的角度,以方便视觉检测装置400对工件产品进行视觉检测。
37.如图2所示,机械手本体34包括:驱动气缸340、传动连杆341、第一导向机构342以及若干旋转式吸嘴组件343。
38.驱动气缸340通过所在的机座连接于z轴直线电机的输出端。驱动气缸340及传动连杆341平行且水平设置,传动连杆341的一端通过连接件与驱动气缸340的输出端传动连接。第一导向机构342位于驱动气缸340和传动连杆341之间,其包括:滑轨以及沿滑轨进行滑动的滑块。滑块进一步与传动连杆341相连接。如此,当驱动气缸340工作时,可带动与之连接的传动连杆341,沿滑轨进行同步平移运动。
39.若干旋转式吸嘴组件343用于吸料,且还可通过自转带动吸取的工件产品进行旋转,以在机械手本体34旋转调节的同时,实现各工件产品的独立旋转,从而满足后续视觉检测的需求。
40.若干旋转式吸嘴组件343共同连接于一基座上。且各旋转式吸嘴组件343按照来料治具上具有的多个腔体的排布方式间隔设置。如此,以便于吸取来料治具腔体中的工件产品。例如,来料治具本体具有六个横向并排间隔设置的腔体时,旋转式吸嘴组件343的数量也对应设置为六个。
41.如图3所示,任一旋转式吸嘴组件343包括:气杆3430、拨块3431、衬套3432、轴承组3433以及吸嘴3434。
42.其中,气杆3430的上端连接有接头,下端为一法兰盘结构。衬套3432套装于气杆3430上,且衬套3432与基座之间还设置有轴承组3433。吸嘴3434连接于下端的法兰盘结构上。如此,吸嘴3434在气压作用下,可产生一吸取工件产品的吸附作用力。为了使得传动连杆341带动吸嘴3434进行旋转,传动连杆341的下端设置有若干并排间隔设置的开槽。此时,拨块3431一端套装于气杆3430的上部,另一端延伸至对应的开槽中。从而,当驱动气缸340工作时,传动连杆341可通过拨块3431带动气杆3430及其下端的吸嘴3434进行同步旋转。
43.此外,为了方便后续视觉检测,各吸嘴3434表面还形成有一层反射层。如此,该反射层可反射入射光线,使得被吸取的工件产品的表面具有更高的亮度,进而便于工业照相机的视觉检测。一个实施方式中,反射层为镀铬层。
44.综上所述,本实用新型的三轴旋转机械手能够根据检测的需求,进行整体的自转并配合独立吸嘴组件的自转,进而方便调节吸取工件产品的角度,有利于对工件产品的各面分别进行尺寸检测,克服了现有分拣装置中检测不便的问题。
45.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
46.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1