基于水轮机机器人加工的工件坐标系标定装置
1.本实用新型属于工业机器人加工设备技术领域,涉及一种基于水轮机机器人加工的工件坐标系标定装置。
背景技术:
2.近年来工业机器人在机械加工领域应用甚广,遍及船舶、航天、轨道交通等领域。机器人在加工之前,会对零件进行工件坐标系标定来确定加工轨迹,尤其是在加工大型复杂零件如水轮机时,为保证精度,往往会标定大量的点位,以保证工件坐标系的准确性。
3.传统的工件坐标系标定方法是使用已经标定好工具坐标系的加工工具,通过人工操作机器人,加工工具触碰零件表面进行示教的方法,考虑到加工工具为刚性配合,且人工操作极易出现失误,导致加工工具、加工工件和机器人本体受到损伤,从而降低工作效率和设备使用寿命,若使用市面上专门的力控工具,成本较高。
技术实现要素:
4.本实用新型针对上述问题,提供一种基于水轮机机器人加工的工件坐标系标定装置,该装置生产制造成本较低,同时使用方便快捷。
5.按照本实用新型的技术方案:一种基于水轮机机器人加工的工件坐标系标定装置,其安装于机器人执行器的末端,其特征在于:包括夹持套筒,所述夹持套筒的内孔紧配合连接缓冲橡胶圈,缓冲橡胶圈的轴向顶端与夹持套筒内孔的顶端之间设置缓冲弹簧;
6.所述缓冲橡胶圈的轴向下端连接锥形标定件,缓冲橡胶圈的圆周表面设置碰撞标识线。
7.作为本实用新型的进一步改进,所述锥形标定件的轴向上端螺纹孔与调节螺栓的下端螺纹连接,调节螺栓的上端与缓冲橡胶圈的内孔紧配合连接。
8.作为本实用新型的进一步改进,在初始状态,碰撞标识线露出夹持套筒的边缘。
9.作为本实用新型的进一步改进,所述缓冲橡胶圈的轴向上端设置定位凸起,缓冲弹簧的下端与定位凸起配合。
10.本实用新型的技术效果在于:本实用新型产品结构合理巧妙,采用缓冲橡胶圈轴向两端分别连接相应结构件的结构,能有效实现可靠稳定的工作;缓冲橡胶圈和缓冲弹簧能够实现工作时的缓冲作业。
附图说明
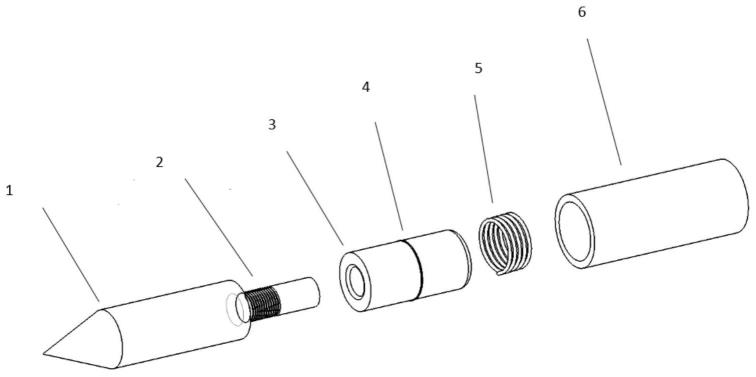
11.图1为本实用新型的结构示意图。
12.图2为本实用新型的工作示意图。
具体实施方式
13.下面结合附图对本实用新型的具体实施方式作进一步的说明。
14.图1、2中,包括锥形标定件1、调节螺栓2、缓冲橡胶圈3、碰撞标识线4、缓冲弹簧5、夹持套筒6等。
15.如图1、2所示,本实用新型是一种基于水轮机机器人加工的工件坐标系标定装置,其安装于机器人执行器的末端,包括夹持套筒6,所述夹持套筒6的内孔紧配合连接缓冲橡胶圈3,缓冲橡胶圈3的轴向顶端与夹持套筒6内孔的顶端之间设置缓冲弹簧5。
16.缓冲橡胶圈3的轴向下端连接锥形标定件1,缓冲橡胶圈3的圆周表面设置碰撞标识线4。缓冲橡胶圈3的材质为天然橡胶,在工作过程中,当发生碰撞时,缓冲橡胶圈3在轴向和径向上起到一定的缓冲作用。
17.碰撞标识线4为缓冲橡胶圈3上所标记 的具有明显可识别颜色的圆形标记,在完成整体装配后,即在初始状态,碰撞标识线4露出夹持套筒6的边缘,在发生碰撞时,其会有一部分或者整体被夹持套筒6隐藏,可通过观察碰撞标识线4,确定锥形标定件分是否发生碰撞。
18.进一步地,在具体实践中,锥形标定件1的轴向上端设置螺纹孔,锥形标定件1的轴向上端螺纹孔与调节螺栓2的下端螺纹连接,调节螺栓2的上端与缓冲橡胶圈3的内孔紧配合连接。调节螺栓2能够根据需要进行旋转,以调节其露出锥形标定件1的长度。
19.缓冲橡胶圈3的轴向上端设置定位凸起,缓冲弹簧5的下端与定位凸起配合。进一步地,缓冲弹簧5一端置于夹持套筒6内,另一端与缓冲橡胶圈3抵靠接触,从而在整体的轴向上起到一定的缓冲作用。
20.如图1、2所示,在工作时,夹持套筒6安装到机器人执行器末端,运动至 水轮机8的边缘,用来记录边缘处的点位。
21.人工标定过程中锥形标定件1尖点与工件表面触碰过度,会迫使锥形标定件1带动调节螺栓2与缓冲橡胶圈3移动并压迫缓冲弹簧5,此时缓冲橡胶圈3表面的碰撞标识线4也会随之被夹持套筒6遮挡,提示操作人员发生触碰,若使用锥形标定件1侧壁触碰工件,调节螺栓2径向压迫它与缓冲橡胶圈3的接触面,缓冲橡胶圈3发生变形,从而起到一定的缓冲作用
22.实例1:如图2所示,要标定水轮机8的工件坐标系,将标定组件7安装到机器人主轴末端,标定好锥形标定件1的在机器人中的工具坐标系tool1,使用tool1采用三点示教的方法,即操作机器人,使用锥形标定件1在水轮机上端面接触示教三个点位,建立一个工件坐标系wobj1,然后选用wobj1为机器人的移动坐标系,操作机器人,使工具坐标系tool1即锥形末端的轴向垂直于工件坐标系wobj1的xy平面,然后线性移动机器人,机器人位置z向不变仅移动xy方向,使用锥形标定件1侧壁,在水轮机圆弧边缘,均匀示教三个或三个以上点位,使用这些点位拟合出圆心位置xyz值,然后转化为在机器人基坐标系下得xyz值,并将wobj1中的xyz值替换为该值,更新后wobj1即为水轮机的工件坐标系。
技术特征:
1.一种基于水轮机机器人加工的工件坐标系标定装置,其安装于机器人执行器的末端,其特征在于:包括夹持套筒(6),所述夹持套筒(6)的内孔紧配合连接缓冲橡胶圈(3),缓冲橡胶圈(3)的轴向顶端与夹持套筒(6)内孔的顶端之间设置缓冲弹簧(5);所述缓冲橡胶圈(3)的轴向下端连接锥形标定件(1),缓冲橡胶圈(3)的圆周表面设置碰撞标识线(4)。2.如权利要求1所述的基于水轮机机器人加工的工件坐标系标定装置,其特征在于:所述锥形标定件(1)的轴向上端螺纹孔与调节螺栓(2)的下端螺纹连接,调节螺栓(2)的上端与缓冲橡胶圈(3)的内孔紧配合连接。3.如权利要求1所述的基于水轮机机器人加工的工件坐标系标定装置,其特征在于:在初始状态,碰撞标识线(4)露出夹持套筒(6)的边缘。4.如权利要求1所述的基于水轮机机器人加工的工件坐标系标定装置,其特征在于:所述缓冲橡胶圈(3)的轴向上端设置定位凸起,缓冲弹簧(5)的下端与定位凸起配合。
技术总结
本实用新型属于工业机器人加工设备技术领域,涉及一种基于水轮机机器人加工的工件坐标系标定装置,其安装于机器人执行器的末端,包括夹持套筒,所述夹持套筒的内孔紧配合连接缓冲橡胶圈,缓冲橡胶圈的轴向顶端与夹持套筒内孔的顶端之间设置缓冲弹簧;所述缓冲橡胶圈的轴向下端连接锥形标定件,缓冲橡胶圈的圆周表面设置碰撞标识线。本实用新型产品结构合理巧妙,采用缓冲橡胶圈轴向两端分别连接相应结构件的结构,能有效实现可靠稳定的工作;缓冲橡胶圈和缓冲弹簧能够实现工作时的缓冲作业。橡胶圈和缓冲弹簧能够实现工作时的缓冲作业。橡胶圈和缓冲弹簧能够实现工作时的缓冲作业。
技术研发人员:彭芳瑜 董连杰 宋国栋 赵敏 吕栋阳
受保护的技术使用者:华中科技大学无锡研究院
技术研发日:2021.09.15
技术公布日:2022/9/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1