一种新型自动巡线机器人的制作方法
1.本实用新型涉及教学用机器人技术领域,特别是涉及一种新型自动巡线机器人。
背景技术:
2.从全球范围来看,机器人是衡量国家创新能力和产业竞争力的重要指标,已成为全球新一轮科技和产业革命的重要切入点。人工智能技术的突破、核心零部件成本的下降,加速了机器人在各领域的渗透,将极大的促进社会生产力的发展和产业结构的调整。因此,积极开展机器人教育,有助于学生对机器人的了解学习,不至于在机器人时代落伍,增强未来的竞争力。而机器人教育的重要形式之一是各种形式的机器人竞赛,此类活动可以培养学生的创造力、合作能力及学科融合能力。
3.申请号为cn201320544567.6的专利文件,公开了一种循线轨迹车,应用于科学探测、日常生活和青少年兴趣培养等多种活动中,该循线轨迹车通过常用且廉价的电子元件即能实现循迹,但其只有两路红外反射组件用于循线,稳定性很差,并且其系统结构简单,功能单一,不能适应多变的环境。
技术实现要素:
4.本实用新型的目的是提供一种新型自动巡线机器人,具备高精度的自动巡线功能,自动化控制水平高,功能完善,在机器人竞赛和教育领域具有良好的应用价值。
5.为实现上述目的,本实用新型提供了如下方案:
6.一种新型自动巡线机器人,包括:机器人主体以及设置在机器人主体上的运动机构、控制机构、传感机构以及电源模块,所述电源模块用于为机器人供电;所述运动机构包括设置在机器人主体底部的四个移动轮以及与移动轮驱动连接的驱动电机,所述控制机构包括控制器以及与控制器电性连接的电机驱动器,所述电机驱动器与所述驱动电机连接;所述传感机构包括6个红外传感器、4个激光测距传感器、2个巡线传感器,6个所述红外传感器对称均匀分布在所述机器人主体的四周,其中左、右侧各一个,前、后侧各两个;4个所述激光测距传感器分布在所述机器人主体底部四角,均呈仰45
°
角对外发射,用于检测地面坑洼和较大落差区域;2个所述巡线传感器分布在所述机器人主体的前后端底部,且与前后端边缘平行放置;所述红外传感器、激光测距传感器、巡线传感器分别与所述控制器电性连接。
7.进一步的,所述机器人主体上罩设有铝合金外壳,所述铝合金外壳整体为对称结构,前后端为铲型结构,中间为长方形腔体,所述控制机构、电源模块设置在所述长方形腔体内。
8.进一步的,所述长方形腔体顶部设置有电源开关,所述电源开关与所述电源模块连接。
9.进一步的,所述长方形腔体顶部设置有按键以及显示屏,所述按键、显示屏与所述控制器连接。
10.进一步的,所述长方形腔体内设置独立的电池槽,所述电源模块为锂电池,设置在所述电池槽内,所述电池槽上方铰接设置有合页盖,方便更换锂电池。
11.进一步的,所述控制机构还包括无线通信模块,所述无线通信模块与所述控制器连接,所述控制器通过所述无线通信模块与远程控制终端通信连接。
12.进一步的,所述控制器为基于armcortex-m3核心的stm32处理器。
13.进一步的,所述移动轮采用橡胶轮胎。
14.进一步的,所述机器人主体上还设置有报警装置,所述报警装置为蜂鸣器或指示灯,所述报警装置与所述控制器电性连接。
15.根据本实用新型提供的具体实施例,本实用新型公开了以下技术效果:本实用新型提供的新型自动巡线机器人,在机器人主体上综合设置有多个红外传感器、激光传感器和巡线传感器,各红外传感器探测的区域为其前后各180
°
的范围,能够对各方向障碍物进行检测,4个激光测距传感器分布在机器人底部四角,均呈仰45
°
角对外发射,对地面坑洼和较大落差区域进行检测,2个巡线传感器分布在机器人前后端底部,且与前后边缘平行放置,机器人正常行进时巡线传感器与被巡线路垂直,当机器人与线路在方向上产生一定角度的误差,则判定机器人行进方向偏离了正常轨道,帮助机器人更加安全高效精确的巡线;该机器人具备高精度的自动巡线功能,自动化控制水平高。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
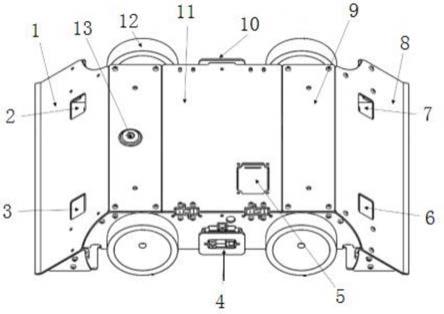
17.图1为本实用新型实施例新型自动巡线机器人的结构示意图;
18.图2为本实用新型实施例新型自动巡线机器人的底部结构示意图;
19.图3为本实用新型实施例新型自动巡线机器人的电气控制原理图;
20.附图标记:1、前铲盖;2、第一红外传感器;3、第二红外传感器;4、第三红外传感器;5、按键及显示屏区域;6、第四红外传感器;7、第五红外传感器;8、后铲盖;9、长方形腔体;10、第六红外传感器;11、合页盖;12、移动轮;13、电源开关;14、第一激光测距传感器;15、第二激光测距传感器;16、第一巡线传感器;17、第三激光测距传感器;18、第二巡线传感器;19、第四激光测距传感器。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.本实用新型的目的是提供一种新型自动巡线机器人,具备高精度的自动巡线功能,自动化控制水平高,功能完善,在机器人竞赛和教育领域具有良好的应用价值。
23.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具
体实施方式对本实用新型作进一步详细的说明。
24.如图1-图3所示,本实用新型实施例提供的新型自动巡线机器人,包括:机器人主体以及设置在机器人主体上的运动机构、控制机构、传感机构以及电源模块,所述电源模块用于为机器人供电;所述运动机构包括设置在机器人主体底部的四个移动轮12以及与移动轮12驱动连接的驱动电机,所述控制机构包括控制器以及与控制器电性连接的电机驱动器,所述电机驱动器与所述驱动电机连接;所述传感机构包括6个红外传感器、4个激光测距传感器、2个巡线传感器,6个所述红外传感器关于机器人主体的中心对称均匀分布在所述机器人主体的四周,其中左、右侧各一个,分别为第三红外传感器4、第六红外传感器10,前、后侧各两个,分别为第一红外传感器2和第二红外传感器3、第四红外传感器6和第五红外传感器7;4个所述激光测距传感器分布在所述机器人主体底部四角,均呈仰45
°
角对外发射,用于检测地面坑洼和较大落差区域,包括第一激光测距传感器14、第二激光测距传感器15、第三激光测距传感器17、第四激光测距传感器19;2个所述巡线传感器分布在所述机器人主体的前后端底部,且与前后端边缘平行放置,分别为第一巡线传感器16、第二巡线传感器18;所有所述红外传感器、激光测距传感器、巡线传感器分别与所述控制器电性连接。
25.机器人运动过程中,各红外传感器探测的区域为其前后各180
°
的范围。由于机器人前后区域障碍物相对于其左右区域障碍物,对其行进的影响更大,左右区域的障碍物几乎不影响机器人的行进,故弱化机器人对左右两边的探测需求(左右各安装一个红外传感器即可)。同时红外传感器是一种较大范围的发散式探测器,所以这样的布局可以满足自动机器人对各方向障碍物的检测需求。
26.该机器人配置4个激光测距传感器,分布在机器人底部四角,均呈仰45
°
角对外发射,用于检测地面坑洼和较大落差区域。考虑到机器人发生磕碰、跌落或遇到坑洼路面时,某一角最先触地或跌落的概率最大,故激光测距传感器分布于四角,优先对角落信号检测的方式能够满足机器人运行需求。
27.该机器人配置2个巡线传感器,分布在机器人前后端底部,且与前后边缘平行放置。每个巡线传感器由16组线路检测单元组成,机器人正常行进时巡线传感器与被巡线路垂直,当机器人与线路在方向上产生一定角度的误差,则判定机器人行进方向偏离了正常轨道,需要调整角度,转动的角度与方向则由巡线传感器补偿计算得到。1个巡线传感器容易丢数或误判,导致机器人无法修正误差而不能回到正确运动轨迹。前后两个巡线传感器可极大降低这样的风险,两个巡线传感器平行排列,采集的数据可由单线数据组合成二维数据阵列,即由标量进一步升级成矢量信息,帮助机器人更加安全高效精确的巡线。
28.所述机器人主体上罩设有铝合金外壳,所述铝合金外壳整体为对称结构,左、右侧视图为等腰梯形,前后端为铲型结构,包括前铲盖1和后铲盖8,利于自身防御与避障,中间为长方形腔体9,长宽高为424mm*304mm*80mm,所述控制机构、电源模块设置在所述长方形腔体9内,各模块之间的连线通过预留的走线孔合理固定,结构紧凑有序。所述移动轮12采用橡胶轮胎,直径80m,设置在外壳的四个角。机器人底盘较低,具备良好的机动性和可控性,最大爬坡高度为35
°
。
29.所述长方形腔体9顶部设置有电源开关13,所述电源开关13与所述电源模块连接。电源开关13具备光源指示功能,安置在腔体顶部靠前醒目的位置,方便操作员紧急制动。
30.所述长方形腔体9顶部设置有按键以及显示屏区域5用于设置按键以及显示屏,为
人机交互单元,所述按键、显示屏与所述控制器连接。
31.所述长方形腔体9内设置独立的电池槽,所述电源模块为锂电池,设置在所述电池槽内,所述电池槽上方铰接设置有合页盖11,方便更换锂电池。
32.所述控制机构还包括无线通信模块,所述无线通信模块与所述控制器连接,所述控制器通过所述无线通信模块与远程控制终端通信连接。所述无线通信模块采用蓝牙模块,蓝牙通信方式用于开发者或用户远程控制或获取机器人的状态信息。蓝牙模块选用u转串蓝牙模块(hc-06),支持多端连接(最多8处),上电自动搜索并连接目标端口,通过uart协议与机器人的控制器通信。电路设计上无需额外复杂的措施,只需给无线通信模块供电,配置相应的滤波电路即可。
33.所述控制器为基于armcortex-m3核心的stm32处理器,可编程功能丰富、便于代码调试,且配置了5路串行通信接口,用户可随意选择、分时复用。与mcu直连部分接口分别做了限流隔离措施,可满足多种串行通信协议下的传感器、外设使用。
34.所述机器人主体上还设置有报警装置,所述报警装置为蜂鸣器或指示灯,所述报警装置与所述控制器电性连接。
35.机器人电源模块可以由多级电源组成,以满足各模块组成的使用要求。同时具备防反接、抗电磁干扰、低电流纹波、防过流过压等能力。一级电源(即输入电源)为24v,设计相应防反接、防雷击、共模抑制、过载保护、防止瞬态高电压损伤器件等功能措施。二级电源为5v,通过buck降压获得,适配多路传感器外设供电。带载能力强,单路输出电流可达1a以上。三级电源为3.3v,作为稳定线性电源,带载能力较弱,主要为mcu、少量精密传感器供电等。各级电源在设计时需满足计算各级功耗需求,防止由于电源带载能力较差引发的“抢电”、“重启”现象。
36.机器人电机驱动电路为由4块bts7960核心电机驱动芯片搭建起来的两路全桥式输出电路。电路基于逻辑门进行信号的调制控制,保证全桥mos不会因为程序误操作而导致上下桥臂同开导致的短路事故,且控制方法更加精简,具有快速响应、带载能力强且具备自检测和自保护功能。
37.机器人传感器电路分为开关量采集电路和模拟量采集电路。开关量采集电路使用74hc165移位寄存器,传感器电路以设计两块74hc165移位寄存器串联的形式实现16位数据并入串处的功能,大大提高了普通i/o口的利用率(仅需两个普通i/o口即可实现对外16个引脚的高低电平数据采集),实现了采样数据的高效调用。模拟量采集电路的每路采集接口并非与mcu直连,采取中间环节隔离保护操作(电压跟随电路),允许输入电压范围:-0.3~32v,输出至mcu电压范围0~3.9v,保护mcu安全。
38.机器人人机交互电路可分为按键和显示屏两部分。按键的键盘电路以矩阵中断响应的方式进行设计,12路按键组合成3
×
4的键值响应电路,以i2c协议芯片传递响应信号,向机器人控制器传递按键中断事件的同时也递交按键键值。显示屏以128
×
64点阵的形式组合成像,电路中配置了一块32k的eeprom存储单元,用户可以预先把所需的点阵内容存入eeprom,需要显示的时候直接从外部空间读取即可。在自动机器人日常的操作和功能调试过程中,利用键盘输入待测试参数、调配机器人代码,以及输入预设指令等;机器人运行状态和重要指标将在显示屏上显示。
39.本实用新型提供的新型自动巡线机器人,在机器人主体上综合设置有多个红外传
感器、激光传感器和巡线传感器,各红外传感器探测的区域为其前后各180
°
的范围,能够对各方向障碍物进行检测,4个激光测距传感器分布在机器人底部四角,均呈仰45
°
角对外发射,对地面坑洼和较大落差区域进行检测,2个巡线传感器分布在机器人前后端底部,且与前后边缘平行放置,机器人正常行进时巡线传感器与被巡线路垂直,当机器人与线路在方向上产生一定角度的误差,则判定机器人行进方向偏离了正常轨道,帮助机器人更加安全高效精确的巡线;该机器人具备高精度的自动巡线功能,自动化控制水平高。
40.本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1