一种工业智能体设备的制作方法
1.本实用新型涉及工业智能技术领域,具体涉及一种工业智能体设备。
背景技术:
2.工业智能体,是具备独立的“眼”、“手”、“脚”的5g化的系统设备,不但具备视觉、移动、搬运等功能,同时在边缘侧部署承载智能计算的边缘计算设备,相当于给工业智能体赋予了一个脑,可以使“眼”、“手”、“脚”协同作业,能够满足柔性制造的需求,进行多种人机协同操作,例如遥控操作或自主完成制孔、多工件移动喷涂、自主移动和抓取和运送工件等工作。
3.目前的工业智能体设备一般是将220v电压逆变为48v供电给机械臂,而移动智能小车的供电电压为24v,由于移动智能小车与机械臂供电类型不同,需要不同的充电器进行充电,使用极其不方便,并且需要间歇性充电,现有的工业智能体设备并不能满足该要求。
4.因此,行业内亟需一种能解决上述问题的方案。
技术实现要素:
5.本实用新型的目的在于针对现有技术的不足而提供一种工业智能体设备。
6.本实用新型的目的可以通过如下所述技术方案来实现。
7.一种工业智能体设备,包括设备主体、移动小车、机械臂、电源模块、控制器及移动充电桩,所述控制器安装在所述设备主体内部并与移动小车及所述机械臂通讯连接,所述设备主体固定设置在所述移动小车上,所述机械臂设置在所述设备主体上,所述移动充电桩与所述移动小车通讯连接,所述电源模块设置在所述设备主体的内部,所述电源模块包括24v电源、机械臂连接口、24v转12v变压器、电源开关及24v转48v变压器,所述24v电源与所述电源开关电性连接,所述电源开关分别与所述24v转12v变压器及所述24v转48v变压器电性连接,所述24v转12v变压器与所述控制器的i/o口电性连接,所述24v转48v变压器与所述机械臂电性连接。
8.作为优选地,所述移动充电桩包括充电桩主体、移动底座、充电模块、充电针及充电位置检测标记件,所述充电桩主体固定在所述移动底座上,所述充电模块设置在所述充电桩主体内部,所述充电针设置在所述充电桩主体上并与所述充电模块电性连接,所述充电位置检测标记件设置在所述充电桩主体上并位于所述充电针的旁侧。
9.作为优选地,所述充电位置检测标记件包括标记凹槽,所述标记凹槽为v形凹槽,所述标记凹槽的右前侧设有前板,所述标记凹槽与所述前板形成vl形标记。
10.作为优选地,所述机械臂的末端加装有末端执行套件、视觉检测相机或高清摄像头。
11.作为优选地,所述移动小车的对角处设有与其摆动连接的激光雷达器件。
12.作为优选地,所述机械臂为双臂形机械臂,所述双臂形机械臂包括固定安装臂、第一臂及第二臂,所述固定安装臂固定在所述设备主体上,所述第一臂与固定安装臂转动连
接,所述第二臂与所述第一臂转动连接。
13.作为优选地,所述机械臂为四足形机械臂,所述四足形机械臂包括抗震平台、视觉检测组件、缓冲足组件及四足供电电源,四个所述缓冲足组件分别设置在所述抗震平台的四个端角处,所述视觉检测组件安装在所述抗震平台的侧面上,所述四足供电电源设置在所述抗震平台的内部并与所述视觉检测组件电性连接。
14.作为优选地,所述机械臂为蛇形机械臂,所述蛇形机械臂由若干个蛇形关节弯向连接而成,所述蛇形关节包括关节块及牵引条,两个所述关节块之间通过所述牵引条连接。
15.作为优选地,所述移动小车为mir移动小车。
16.与现有技术比,本实用新型的有益效果:
17.本实用新型研发了一种工业智能体设备,采用24v电源给移动小车供电,通过24v转48v变压器给机械手臂供电,通过24v转12v变压器给控制器i/o口供电,从而实现一个电源便可为移动小车及机械手臂供电,有效解决供电类型不同的适用问题,同时设置移动充电桩,在移动小车不工作时可以自动前往移动充电桩处进行充电,解决间歇性充电的问题。
附图说明
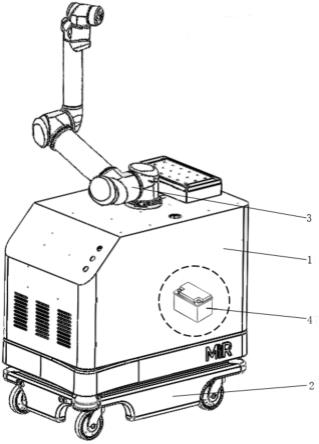
18.图1为本实用新型实施例中工业智能体设备的结构示意图。
19.图2为本实用新型实施例中移动充电桩的结构示意图。
20.图3为本实用新型实施例中电源模块的结构示意图。
21.图4为本实用新型实施例中激光雷达器件工作时的示意图。
22.图5为本实用新型实施例中双臂形机械臂的结构示意图。
23.图6为本实用新型实施例中四足形机械臂的结构示意图。
24.图7为本实用新型实施例中蛇形机械臂的结构示意图。
具体实施方式
25.下面将结合具体实施例,对本实用新型的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通的技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本实用新型的保护范围。
26.一种工业智能体设备,如图1、图2及图3所示,包括设备主体1、移动小车2、机械臂3、电源模块4、控制器(图中未示)及移动充电桩5。所述控制器安装在所述设备主体1内部并与移动小车2及所述机械臂3通讯连接,控制器可以是市面上常见的控制器,其作用在于可以根据实际情况控制移动小车2移动位置以及控制机械臂3工作。所述设备主体1固定设置在所述移动小车2上,以便随着移动小车2移动到预定的位置上。所述机械臂3设置在所述设备主体1上。所述移动充电桩5与所述移动小车2通讯连接,移动充电桩5与移动小车2相互通讯,在移动小车2不工作时可以自动前往移动充电桩5处进行充电,解决间歇性充电的问题。所述电源模块4设置在所述设备主体1的内部,设备主体1可以对电源模块4起到保护作用。所述电源模块4包括24v电源41、机械臂连接口42、24v转12v变压器43、电源开关44及24v转48v变压器45。所述24v电源41与所述电源开关44电性连接,所述电源开关44分别与所述24v转12v变压器43及所述24v转48v变压器45电性连接,可以通过电源开关44控制通电或断电。
所述24v转12v变压器43与所述控制器的i/o口电性连接,24v转12v变压器43用于将24v的电压转换成12v电压给控制器提供工作电源。所述24v转48v变压器45与所述机械臂3电性连接,24v转48v变压器45用于将24v的电压转换成48v电压给机械臂3提供工作电源。
27.具体地,可以通过电源开关44控制通电或断电,当通电工作时,24v电源41为小车提供工作电源,同时24v转48v变压器45将24v的电压转换成48v电压给机械手臂供电,24v转12v变压器43将24v的电压转换成12v电压给控制器i/o口供电,从而实现一个电源便可为移动小车2及机械手臂供电,有效解决供电类型不同的适用问题。随后控制器根据实际情况控制移动小车2移动位置以及控制机械臂3进行工作。当不需要工作时,在移动小车2可以自动前往移动充电桩5处进行充电,解决间歇性充电的问题。
28.本实施例中提供的一种工业智能体设备,如图2所示,所述移动充电桩5包括充电桩主体51、移动底座52、充电模块(图中未示)、充电针53及充电位置检测标记件54。所述充电桩主体51固定在所述移动底座52上以随着移动底座52一同移动到预定位置。所述充电模块设置在所述充电桩主体51内部,充电桩主体51可以对充电模块起到保护作用。所述充电针53设置在所述充电桩主体51上并与所述充电模块电性连接,充电时必须压入两个充电引脚,然后发送小电流,确认已正确对接之后再开始充电。所述充电位置检测标记件54设置在所述充电桩主体51上并位于所述充电针53的旁侧,移动小车2可以根据该充电位置检测标记件54来检测移动充电桩5的充电位置。
29.本实施例中提供的一种工业智能体设备,所述充电位置检测标记件54包括标记凹槽,所述标记凹槽为v形凹槽,所述标记凹槽的右前侧设有前板,所述标记凹槽与所述前板形成vl形标记,vl形标记有利于移动小车2精准地识别出充电位置。
30.本实施例中提供的一种工业智能体设备,所述机械臂3的末端加装有末端执行套件、视觉检测相机或高清摄像头。末端执行套件包括夹具、吸附具等,可用于抓取移送产品等,视觉检测相机可用于检测产品缺陷等,高清摄像头用于对生产加工进行监控等,可根据不同的工序进行加装选择。
31.本实施例中提供的一种工业智能体设备,如图4所示,所述移动小车2的对角处设有与其摆动连接的激光雷达器件6,激光雷达器件6的扫描范围为扇面270
°
,通过两个对角的激光雷达器件6扫描范围叠加,实现全方面360
°
无死角扫描,确保安全性问题。
32.本实施例中提供的一种工业智能体设备,如图5所示,所述机械臂3为双臂形机械臂,所述双臂形机械臂包括固定安装臂31、第一臂32及第二臂33,所述固定安装臂31固定在所述设备主体1上,所述第一臂32与固定安装臂31转动连接,所述第二臂33与所述第一臂32转动连接。以此第一臂32可以相对固定安装臂31转动,而第二臂33又可以相对第一臂32转动,可以适应不同角度方位的工作环境。
33.本实施例中提供的一种工业智能体设备,如图6所示,所述机械臂3为四足形机械臂,所述四足形机械臂包括抗震平台35、视觉检测组件37、缓冲足组件34及四足供电电源36。四个所述缓冲足组件34分别设置在所述抗震平台35的四个端角处,缓冲足组件34可以起到缓冲作用,达到抗震的效果。所述视觉检测组件37安装在所述抗震平台35的侧面上,用于检测环境情况,所述四足供电电源36设置在所述抗震平台35的内部并与所述视觉检测组件37电性连接以提供工作电源。
34.本实施例中提供的一种工业智能体设备,如图7所示,所述机械臂3为蛇形机械臂,
所述蛇形机械臂由若干个蛇形关节38弯向连接而成,所述蛇形关节38包括关节块382及牵引条381,两个所述关节块382之间通过所述牵引条381连接。以此通过关节块382与牵引条381配合使用,柔韧性高,空间适应能力强,可在狭小空间内作业。
35.本实施例中提供的一种工业智能体设备,所述移动小车2为mir移动小车2,方便控制。
36.以上借助具体实施例对本实用新型做了进一步描述,但是应该理解的是,这里具体的描述,不应理解为对本实用新型的实质和范围的限定,本领域内的普通技术人员在阅读本说明书后对上述实施例做出的各种修改,都属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1