用于会议记录的办公机器人的制作方法
1.本实用新型属于新一代信息技术领域,尤其涉及用于会议记录的办公机器人。
背景技术:
2.声纹识别,生物识别技术的一种,也称为说话人识别,包括说话人辨认和说话人确认。随着社会的进步,智能机器人的应用也越来越广泛。其中,办公机器人作为智能机器人中的其中一种,能够辅助人员的工作,为工作带来便利,进而提高人员的工作效率。
3.随着社会的发展,现阶段的办公会议中的会议信息量往往较多,且在同一会议中存在多个演讲人员进行演讲的情况。现有的会议记录通过录音设备记录会议内容,但录音设备无法识别演讲人员的身份,从而导致会议后复盘需要人工辨识多个演讲人员的身份,进而提高了会议后复盘的难度,降低了工作效率。
4.因此,亟需一种能识别演讲人员身份的技术方案。
技术实现要素:
5.本实用新型的目的在于:针对现有技术的不足,本实用新型提供一种用于会议记录的办公机器人,以解决现有录音设备无法识别演讲人员身份的问题。
6.为了实现上述目的,本实用新型采用以下技术方案:
7.用于会议记录的办公机器人,包括机体,所述机体在上面设置有拾音机构,所述拾音机构包括电动升降杆、麦克风托部以及麦克风装置,所述电动升降杆的下端设置在机体的上面,所述电动升降杆的上端与所述麦克风托部连接,所述麦克风托部通过转动部与所述麦克风装置转动连接,所述转动部能够带动所述麦克风装置在所述麦克风托部处上下转动,所述电动升降杆能够通过所述麦克风托部带动所述麦克风装置上下升降,所述机体的正面设置有操作面板,所述机体的两侧设置有扬声器,所述机体的背面设置有图像显示器,所述机体的全周面均设置有激光雷达,所述机体在下面设置有移动装置,所述机体的内部设置有控制处理器、声纹识别器、导航定位器、无线通讯器以及数据存储器,所述控制处理器分别与所述电动升降杆、所述麦克风装置、所述操作面板、所述扬声器、所述图像显示器、所述激光雷达、所述移动装置、所述声纹识别器、所述导航定位器、所述无线通讯器以及所述数据存储器电连接。
8.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述麦克风托部设置有转动安装槽,所述转动部通过所述转动安装槽与所述麦克风托部转动连接。
9.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述麦克风托部的侧面设置有上升按钮以及下降按钮,所述控制处理器分别与所述上升按钮以及所述下降按钮电连接。
10.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述机体的正面设置有与所述控制处理器电连接的usb插口。
11.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述麦克风装置
为麦克风阵列。
12.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述操作面板为触摸控制屏。
13.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述激光雷达为十六线激光雷达、三十二线激光雷达或六十四线激光雷达。
14.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述无线通讯器为蓝牙通讯器、wifi通讯器、4g通讯器或5g通讯器。
15.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述数据存储器为prom、eprom或eeprom。
16.作为本实用新型所述的用于会议记录的办公机器人的优选方案,所述移动装置为移动滚轮或者移动履带。
17.本实用新型至少具有以下有益效果:
18.1)本实用新型通过设置声纹识别器以及麦克风装置,使办公机器人能采集语音信息,并将语音信息中的声纹特征与预存的声纹特征进行对比分析,从而使办公机器人能识别出演讲人员的声纹特征,进而使办公机器人能识别出演讲人员的身份信息,降低会议后复盘的难度,提高了工作效率;
19.2)本实用新型通过设置电动升降杆,使演讲人员能根据自身高度需要调节麦克风装置的竖直高度,便于麦克风装置进行拾音,提高演讲人员的演讲体验;
20.3)本实用新型的麦克风托部通过转动部与所述麦克风装置转动连接,使转动部能够带动所述麦克风装置在所述麦克风托部处上下转动,进而使演讲人员能根据实际需要调节麦克风装置的拾音角度,便于麦克风装置进行拾音,提高演讲人员的演讲体验;
21.4)本实用新型通过设置激光雷达、移动装置以及导航定位器使办公机器人具有移动导航功能,从而使办公机器人能根据实际需要自动前往至特定位置供演讲人员使用。
附图说明
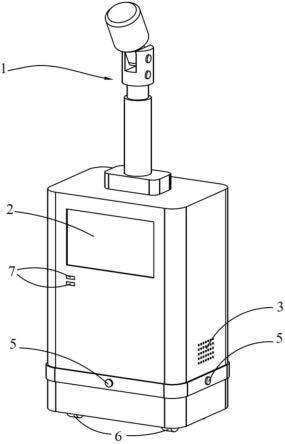
22.图1为本实用新型的结构示意图之一。
23.图2为本实用新型的结构示意图之二。
24.图3为本实用新型中拾音机构的结构示意图。
25.图4为本实用新型的原理框图。
26.图中:
27.1-拾音机构;
28.11-电动升降杆;12-麦克风托部;121-上升按钮;122-下降按钮;123-转动安装槽;13-麦克风装置;131-转动部;
29.2-操作面板;
30.3-扬声器;
31.4-图像显示器;
32.5-激光雷达;
33.6-移动装置;
34.7-usb插口。
具体实施方式
35.为使本实用新型的技术方案和优点更加清楚,下面将结合具体实施方式和说明书附图,对本实用新型及其有益效果作进一步详细的描述,但本实用新型的实施方式不限于此。
36.如图1至图4所示,用于会议记录的办公机器人,包括机体,机体在上面设置有拾音机构1,拾音机构1包括电动升降杆11、麦克风托部12以及麦克风装置13,电动升降杆11的下端设置在机体的上面,电动升降杆11的上端与麦克风托部12连接,麦克风托部12通过转动部131与麦克风装置13转动连接,转动部131能够带动麦克风装置13在麦克风托部12处上下转动,电动升降杆11能够通过麦克风托部12带动麦克风装置13上下升降,机体的正面设置有操作面板2,机体的两侧设置有扬声器3,机体的背面设置有图像显示器4,机体的全周面均设置有激光雷达5,机体在下面设置有移动装置6,机体的内部设置有控制处理器、声纹识别器、导航定位器、无线通讯器以及数据存储器,控制处理器分别与电动升降杆11、麦克风装置13、操作面板2、扬声器3、图像显示器4、激光雷达5、移动装置6、声纹识别器、导航定位器、无线通讯器以及数据存储器电连接。具体地,控制处理器为单片机或arm9芯片,声纹识别器为用vingtech声纹识别芯片或具有科大讯飞的声纹识别开发模块的芯片。其中,激光雷达5用于发射探测信号以获得路况信息,图像显示器4用于显示演讲需要展示的图像信息。
37.本实施例的工作原理:
38.1)当演讲人员需要演讲时,演讲人员使用终端设备通过无线通讯向办公机器人发送命令信息,命令信息包括该演讲人员的在会议室中的位置坐标;
39.2)办公机器人通过无线通讯器接收命令后通过移动装置6前往该演讲人员的位置,移动途中通过激光雷达5进行移动避障,同时通过导航定位器进行导航定位;办公机器人到达该演讲人员的位置后,演讲人员可通过操作面板2对办公机器人进行进一步操作;
40.3)演讲人员通过办公机器人的麦克风装置13演讲时,办公机器人通过麦克风装置13采集演讲人员的语音信息,并通过控制处理器将语音信息发送至扬声器3实时播放;其中,控制处理器会将语音信息发送至声纹识别器中得出声纹特征,并将该声纹特征与预存的声纹特征进行比对分析,进而识别得出该演讲人员的身份信息;同时,演讲人员的语音信息会通过控制处理器传输至数据存储器中存储并与该演讲人员的身份信息对应,进而便于会议后复盘时查找对应演讲人员的会议语音内容;
41.4)演讲人员可通过操作面板2调节升降杆的竖直高度,进而调节麦克风装置13的竖直高度,便于麦克风装置13进行拾音;同时,由于麦克风托部12通过转动部131与麦克风装置13转动连接,演讲人员能够手动上下转动麦克风装置13,进而调节麦克风装置13的拾音角度,便于麦克风装置13进行拾音。
42.本实施例至少具有以下有益效果:
43.1)本实施例通过设置声纹识别器以及麦克风装置13,使办公机器人能采集语音信息,并将语音信息中的声纹特征与预存的声纹特征进行对比分析,从而使办公机器人能识别出演讲人员的声纹特征,进而使办公机器人能识别出演讲人员的身份信息,降低会议后复盘的难度,提高了工作效率;
44.2)本实施例通过设置电动升降杆11,使演讲人员能根据自身高度需要调节麦克风
装置13的竖直高度,便于麦克风装置13进行拾音,提高演讲人员的演讲体验;
45.3)本实施例的麦克风托部12通过转动部131与麦克风装置13转动连接,使转动部131能够带动麦克风装置13在麦克风托部12处上下转动,进而使演讲人员能根据实际需要调节麦克风装置13的拾音角度,便于麦克风装置13进行拾音,提高演讲人员的演讲体验;
46.4)本实施例通过设置激光雷达5、移动装置6以及导航定位器使办公机器人具有移动导航功能,从而使办公机器人能根据实际需要自动前往至特定位置供演讲人员使用。
47.优选地,麦克风托部12设置有转动安装槽123,转动部131通过转动安装槽123与麦克风托部12转动连接。通过上述设置,便于麦克风装置13的拆卸安装。
48.优选地,麦克风托部12的侧面设置有上升按钮121以及下降按钮122,控制处理器分别与上升按钮121以及下降按钮122电连接;当演讲人员按下上升按钮121时,升降杆带动麦克风装置13上升;当演讲人员按下下降按钮122时,升降杆带动麦克风装置13下降。通过上述设置,演讲人员能够用手握住麦克风托部12并通过手指按下上升按钮121或下降按钮122,符合人体工程学原理,进而使演讲人员无需通过操作面板2即可调节麦克风装置13的竖直高度,提高了演讲人员的演讲体验。
49.优选地,机体的正面设置有与控制处理器电连接的usb插口7。通过上述设置,演讲人员能够以usb传输的方式传输文件至办公机器人上。
50.优选地,麦克风装置13为麦克风阵列,麦克风阵列由4~8个排列设置的麦克风组成,麦克风阵列可以将噪声环境中特定声音信号进行有效的增强,麦克风阵列中的麦克风越多越容易实现更好的语音降噪和语音增强效果。通过上述设置,能提高办公机器人的拾音效果。
51.优选地,操作面板2为触摸控制屏。根据实际情况选择,合适的操作面板2。
52.优选地,激光雷达5为十六线激光雷达、三十二线激光雷达或六十四线激光雷达。根据实际情况,选择合适的激光雷达5。
53.优选地,无线通讯器为蓝牙通讯器、wifi通讯器、4g通讯器或5g通讯器。根据实际情况,选择合适的无线通讯器。
54.优选地,数据存储器为prom、eprom或eeprom。根据实际情况,选择合适的数据存储器。
55.优选地,移动装置6为移动滚轮或者移动履带。根据实际情况选择合适的移动装置6。
56.根据上述说明书的揭示和教导,本实用新型所属领域的技术人员还能够对上述实施方式进行变更和修改。因此,本实用新型并不局限于上述的具体实施方式,凡是本领域技术人员在本实用新型的基础上所作出的任何显而易见的改进、替换或变型均属于本实用新型的保护范围。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本实用新型构成任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1