一种用于液晶模组除尘的机械手的制作方法
1.本实用新型属于液晶模组生产设备领域,具体涉及一种用于液晶模组除尘的机械手。
背景技术:
2.液晶模组包括显示屏以及背光灯组件,用于增加有背光灯组件,在对其进行夹持操作时,需要考虑到背光灯组件的重量,因此对屏幕的夹持力与普通的屏幕相比要较大一些,这就导致直接使用现有的机械手对液晶模组进行夹持,液晶模组的边缘夹持处很有可能发生损坏。同时液晶模组在完成初步安装时,表面通常会积累一些灰尘颗粒,通常会另外使用一些除尘机构进行除尘操作,这就大大增加了液晶模组的夹持时长,更容易造成液晶模组边缘的损坏。
3.因此,针对以上问题研制出一种适用于液晶模组的除尘机械手是本领域技术人员所急需解决的难题。
技术实现要素:
4.为解决上述问题,本实用新型公开了一种用于液晶模组除尘的机械手。
5.为达到上述目的,本实用新型的技术方案如下:一种用于液晶模组除尘的机械手,包括夹持块、支撑连杆、夹持连杆以及除尘机构;夹持块为对称设置的两个,转动安装于支撑连杆的前端,并且夹持块上设有贯通的除尘孔;夹持连杆为伸缩连杆,同样为对称设置的两个,一端与夹持块的外侧相连,另一端与支撑连杆的中部相连;除尘机构包括除尘管以及除尘泵;除尘泵设置于支撑连杆的末端,且通过除尘管与两个除尘孔相连通。
6.进一步地,夹持连杆为微型伺服伸缩杆,并且两个夹持连杆连接至同一个伺服驱动器。
7.进一步地,夹持块的前端内侧设有缓冲槽;缓冲槽内填充有缓冲垫,并且缓冲垫与缓冲槽的槽底之间还设有感应片。
8.进一步地,感应片为压力传感器,与伺服驱动器电性相连接。
9.进一步地,夹持块的内侧还配合安装有导向滚轮;导向滚轮的表面包裹有一层海绵层。
10.进一步地,夹持块的前端向内设有夹持凸起;夹持凸起的内侧与导向滚轮相平齐。
11.本实用新型的有益效果为:
12.1、提供了一种适用于液晶模组的夹持除尘机械手,在对液晶模组的边缘进行有效夹持的同时,对其表面进行有效除尘,保障液晶模组的生产质量;
13.2、在对液晶模组的端部进行紧密夹持的同时,还可放置由于夹持力过大所导致的液晶模组损坏,可适用于类似液晶模组的其他结构;
14.3、整体结构新颖,生产制造便捷,并且整个夹持过程可控;
15.4、具有良好的实用性及市场前景。
附图说明
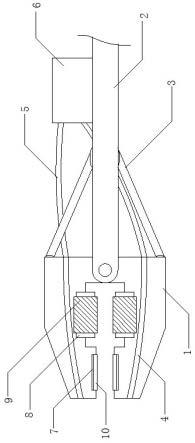
16.图1、本实用新型的结构示意图。
17.附图标识列表:夹持块1、支撑连杆2、夹持连杆3、除尘孔4、除尘管5、除尘泵6、感应片7、导向滚轮8、海绵层9、缓冲垫10。
具体实施方式
18.下面结合附图和具体实施方式,进一步阐明本实用新型,应理解下述具体实施方式仅用于说明本实用新型而不用于限制本实用新型的范围。
19.如图1所示为本实用新型的结构示意图,本实用新型为一种用于液晶模组除尘的机械手,包括夹持块1、支撑连杆2、夹持连杆3以及除尘机构。
20.夹持块1为对称设置的两个,转动安装于支撑连杆2的前端,夹持块1上设有贯通的除尘孔4;夹持块1的前端向内设有夹持凸起,夹持凸起处向内设有缓冲槽;缓冲槽内填充有缓冲垫10,并且缓冲垫10与缓冲槽的槽底之间还设有感应片7;夹持块1的内侧还配合安装有导向滚轮8;导向滚轮8的表面包裹有一层海绵层9。
21.夹持连杆3为伸缩连杆,同样为对称设置的两个,一端与夹持块1的外侧相连,另一端与支撑连杆2的中部相连。
22.除尘机构包括除尘管5以及除尘泵6;除尘泵6设置于支撑连杆2的末端,且通过除尘管5与两个除尘孔4相连通。
23.夹持连杆3为微型伺服伸缩杆,并且两个夹持连杆3连接至同一个伺服驱动器。
24.以上感应片7为压力传感器,与伺服驱动器电性相连接,并且夹持凸起的内侧与导向滚轮8相平齐。
25.本实用新型在对液晶模组进行夹持时,通过与两个夹持块1相连的支撑连杆2的伸长,将两个夹持块1朝向液晶模组的边缘处进行闭合夹持,通过夹持力可通过感应片7进行感应,并向伺服驱动器发送信号,通过预先设置好的参数对支撑连杆2的长度变化进行控制,以保证既能够对液晶模组进行有效地夹持,同时也放置用于夹持力过大导致液晶模组的边缘发生损坏。
26.完成夹持后,利用除尘泵6产生的空气,依次通过除尘管5以及除尘孔4对液晶模组的表面进行除尘操作。
27.需要说明的是,以上内容仅仅说明了本实用新型的技术思想,不能以此限定本实用新型的保护范围,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰均落入本实用新型权利要求书的保护范围之内。
技术特征:
1.一种用于液晶模组除尘的机械手,其特征在于:包括夹持块(1)、支撑连杆(2)、夹持连杆(3)以及除尘机构;所述夹持块(1)为对称设置的两个,转动安装于支撑连杆(2)的前端,并且夹持块(1)上设有贯通的除尘孔(4);所述夹持连杆(3)为伸缩连杆,同样为对称设置的两个,一端与夹持块(1)的外侧相连,另一端与支撑连杆(2)的中部相连;所述除尘机构包括除尘管(5)以及除尘泵(6);所述除尘泵(6)设置于支撑连杆(2)的末端,且通过除尘管(5)与两个除尘孔(4)相连通。2.根据权利要求1所述的一种用于液晶模组除尘的机械手,其特征在于:所述夹持连杆(3)为微型伺服伸缩杆,并且两个夹持连杆(3)连接至同一个伺服驱动器。3.根据权利要求1所述的一种用于液晶模组除尘的机械手,其特征在于:所述夹持块(1)的前端内侧设有缓冲槽;所述缓冲槽内填充有缓冲垫(10),并且缓冲垫(10)与缓冲槽的槽底之间还设有感应片(7)。4.根据权利要求3所述的一种用于液晶模组除尘的机械手,其特征在于:所述感应片(7)为压力传感器,与伺服驱动器电性相连接。5.根据权利要求1所述的一种用于液晶模组除尘的机械手,其特征在于:所述夹持块(1)的内侧还配合安装有导向滚轮(8);所述导向滚轮(8)的表面包裹有一层海绵层(9)。6.根据权利要求5所述的一种用于液晶模组除尘的机械手,其特征在于:所述夹持块(1)的前端向内设有夹持凸起;所述夹持凸起的内侧与导向滚轮(8)相平齐。
技术总结
本实用新型提供一种用于液晶模组除尘的机械手,包括夹持块、支撑连杆、夹持连杆以及除尘机构;夹持块为对称设置的两个,转动安装于支撑连杆前端,夹持块上设有贯通的除尘孔;夹持连杆为伸缩连杆一端与夹持块外侧相连,另一端与支撑连杆中部相连;除尘机构包括除尘管以及除尘泵。本实用新型提供了一种适用于液晶模组的夹持除尘机械手,在对液晶模组的边缘进行有效夹持的同时,对其表面进行有效除尘,保障液晶模组的生产质量;在对液晶模组的端部进行紧密夹持的同时,还可放置由于夹持力过大所导致的液晶模组损坏,可适用于类似液晶模组的其他结构;整体结构新颖,生产制造便捷,并且整个夹持过程可控;具有良好的实用性及市场前景。具有良好的实用性及市场前景。具有良好的实用性及市场前景。
技术研发人员:吴裕强 王海涛
受保护的技术使用者:江苏聚泰科技有限公司
技术研发日:2021.12.28
技术公布日:2022/7/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1