控制电路及电动剃须刀的制作方法
1.本实用新型涉及电路控制技术领域,尤其涉及一种控制电路及电动剃须刀。
背景技术:
2.目前,电动剃须刀在日常使用时会内积聚毛发、皮屑等,因此需要对电动剃须刀用水清洗,以保持电动剃须刀的清洁干净。
3.相关技术中,按键式的电动剃须刀会在按键处产生缝隙,该缝隙不利于防水设计。而采用触摸或指纹识别等感应方式进行开关机的电动剃须刀(如申请号为201721429534.1的专利《一种感应式电动剃须刀》),虽可进行较好的防水设计,但需要电动剃须刀的cpu处于长期待机状态,因此会造成耗电,进而影响电动剃须刀电池的可使用时长。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种控制电路及电动剃须刀,能够实现甩动开机开启工作、与人体不接触时自动关机的智能控制,并且关机零功耗,避免使用触摸或指纹识别等开关机方式所存在的待机功耗问题,以及按键式开关所带来的不利于防水设计的缺点,并且能够延长电动剃须刀电池的可使用时长。
5.根据本实用新型的第一方面实施例的控制电路,包括:主控模块;开关驱动模块,所述开关驱动模块用于分别与电池、主控模块连接,所述开关驱动模块用于接收震动触发信号,并根据所述震动触发信号生成第一驱动信号;其中,所述电池用于提供电源;开关模块,所述开关模块分别与所述开关驱动模块、所述电池、所述主控模块连接;马达驱动模块,所述马达驱动模块分别与所述开关模块、所述主控模块连接;采样模块,所述采样模块分别与所述马达驱动模块、所述主控模块连接,所述采样模块用于采集所述马达驱动模块的电信号;其中,所述开关模块用于根据所述第一驱动信号和所述电源切换导通状态,以为所述主控模块和所述马达驱动模块供电;其中,所述导通状态包括导通和关断;所述主控模块用于生成第二驱动信号,所述马达驱动模块用于根据所述电源和所述第二驱动信号切换工作状态;所述主控模块还用于根据所述采样模块采集的电信号更新所述第一驱动信号。
6.根据本实用新型实施例的控制电路,至少具有如下有益效果:将震动触发信号作为开关驱动模块的触发信号,即开关驱动模块用于根据震动触发信号生成第一驱动信号。当开关模块根据第一驱动信号和电源导通时,电池提供的电源通过开关模块传输至主控模块和马达驱动模块,马达驱动模块根据该电源和第二驱动信号启动工作。由此可知,本技术实施例将震动触发信号作为马达驱动模块工作状态的间接控制信号,无需按键,因此本技术实施例提供的控制电路不仅能够进行较好的防水设计,还能够避免使用指纹或触摸感应开关机方式控制时出现的待机耗能现象。并且,主控模块还用于根据所采集的电信号更新第一驱动信号,当主控模块根据采样模块所采集的电信号确定马达驱动模块空载,和/或空载时长大于预设时间阈值时,主控模块将使开关模块导通的第一驱动信号更新为使开关模
块关断的第一驱动信号,从而自动关机,马达驱动模块停止工作。因此,本技术实施例提供的控制电路还能够降低电池的功耗,从而延长了电池的可使用时长。
7.根据本实用新型的一些实施例,所述开关驱动模块包括:震动开关,所述震动开关用于与所述电池连接,所述震动开关用于接收所述震动触发信号,并根据所述震动触发信号生成子信号;第一电阻,所述第一电阻的一端与所述震动开关连接;第一三极管,所述第一三极管的基极与所述第一电阻的另一端连接,所述第一三极管的发射极接地,所述第一三极管的集电极与所述开关模块连接;其中,所述第一三极管用于根据所述子信号生成所述第一驱动信号;第二电阻,所述第二电阻的一端与所述第一三极管的基极连接,所述第二电阻的另一端与所述主控模块的第一端口连接;第一电容,所述第一电容的一端与所述第一三极管的基极连接,所述第一电容的另一端接地。
8.根据本实用新型的一些实施例,所述开关模块包括:第二mos管,所述第二mos管的源极与所述电池连接,所述第二mos管的漏极与所述马达驱动模块连接;第三电阻,所述第三电阻的一端与所述电池连接,所述第三电阻的另一端与所述第二mos管的栅极连接;第四电阻,所述第四电阻的一端与所述第二mos管的栅极连接,所述第四电阻的另一端与所述第一三极管的集电极连接;第二电容,所述第二电容的一端与所述第二mos管的漏极连接,所述第二电容的另一端接地;其中,所述第二mos管用于根据所述第一驱动信号和所述电源切换所述导通状态。
9.根据本实用新型的一些实施例,所述马达驱动模块包括:马达,所述马达的正极与所述第二mos管的漏极连接;第三mos管,所述第三mos管的漏极与所述马达的负极连接,所述第三mos管的栅极与所述主控模块的第二端口连接,所述第三mos管的源极与所述采样模块连接;二极管,所述二极管的负极与所述马达的正极连接,所述二极管的正极与所述马达的负极连接;第五电阻,所述第五电阻的一端与所述第三mos管的栅极连接,所述第五电阻的另一端接地;其中,所述马达用于根据所述电源和所述第二驱动信号切换所述工作状态。
10.根据本实用新型的一些实施例,所述采样模块包括:第六电阻,所述第六电阻的一端与所述第三mos管的源极连接,所述第六电阻的另一端接地;第七电阻,所述第七电阻的一端与所述第六电阻的一端连接,所述第七电阻的另一端与所述主控模块的第三端口连接;第三电容,所述第三电容的一端与所述第七电阻的另一端连接,所述第三电容的另一端与所述第六电阻的另一端连接。
11.根据本实用新型的一些实施例,所述震动开关为弹簧型震动感应触发开关。
12.根据本实用新型的第二方面实施例的电动剃须刀,包括:如第一方面任一实施例所述的控制电路。
13.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
14.下面结合附图和实施例对本实用新型做进一步的说明,其中:
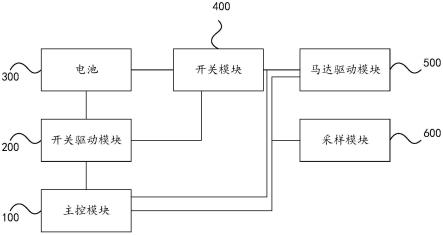
15.图1为本实用新型实施例控制电路的一模块框图;
16.图2为本实用新型实施例控制电路的一电路结构示意图。
17.附图标记:
18.主控模块100、开关驱动模块200、电池300、开关模块400、马达驱动模块500、采样模块600。
具体实施方式
19.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
20.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
21.在本实用新型的描述中,若干的含义是一个以上,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
22.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
23.本实用新型的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
24.参照图1,本技术实施例提供了一种控制电路,该控制电路包括主控模块100、开关驱动模块200、开关模块400、马达驱动模块500和采样模块600。开关驱动模块200用于分别与电池300、主控模块100连接,开关驱动模块200用于接收震动触发信号,并根据震动触发信号生成第一驱动信号,电池300用于提供电源。开关模块400分别与开关驱动模块200、电池300、主控模块100连接,开关模块400用于根据第一驱动信号和电源切换导通状态,以为马达驱动模块500和主控模块100供电,导通状态包括导通和关断。马达驱动模块500 分别与开关模块400、主控模块100连接。采样模块600分别与马达驱动模块500、主控模块100连接,采样模块600用于采集马达驱动模块500的电信号。其中,主控模块100用于生成第二驱动信号,马达驱动模块500用于根据电源和第二驱动信号切换工作状态,主控模块100还用于根据采样模块600所采集的电信号更新第一驱动信号。
25.具体地,本技术实施例提供的控制电路可应用于通过马达进行工作的设备,如电动剃须刀等。以下,以应用于电动剃须刀为例进行具体说明。马达驱动模块500包括马达等元器件,当将控制电路应用于电动剃须刀时,马达驱动模块500的工作状态即为电动剃须刀的工作状态。开关模块400设置于电池300与马达驱动模块500、主控模块100的连接路径上,当开关模块400导通时,电池300通过开关模块400向马达驱动模块500、主控模块100传输电
源,马达驱动模块500根据该电源和主控模块100生成的第二驱动信号启动工作,从而实现电动剃须刀的启动。其中,开关驱动模块200用于控制开关模块400导通或关断。由此可知,开关驱动模块200用于间接控制马达驱动模块500的工作状态。因此,为了实现电动剃须刀的防水设计,将开关驱动模块200设置为震动触发模块,即震动触发信号为开关驱动模块200 的触发信号。当开关驱动模块200接收到震动触发信号时,开关驱动模块200生成能够控制开关模块400导通的第一驱动信号,从而为主控模块100和马达驱动模块500供电,主控模块的第二驱动信号控制马达驱动模块500启动工作。
26.可以理解的是,采样模块600用于对马达驱动模块500工作时的电信号进行采样,该电信号包括电流信号、电压信号中的至少一种。采样模块600将该电信号发送给主控模块100,主控模块100根据该电信号判断马达驱动模块500是否空载,即判断电动剃须刀是否未与人体接触。当主控模块100根据电信号确定马达驱动模块500空载,和/或空载时长大于预设时间阈值时,为了降低电池300的功耗,主控模块100通过与开关驱动模块200的连接端口,控制开关驱动模块200生成使开关模块400关断的第一驱动信号,从而关断电池300与马达驱动模块500、主控模块100的连接路径,进而关机使主控模块100和马达驱动模块500断电停止工作,即控制电动剃须刀停止工作。
27.本技术实施例提供的控制电路将震动触发信号作为开关驱动模块200的触发信号,即开关驱动模块200用于根据震动触发信号生成第一驱动信号。当开关模块400根据第一驱动信号和电源导通时,电池300提供的电源通过开关模块400传输至主控模块100和马达驱动模块500,马达驱动模块500根据该电源和主控模块100提供的第二驱动信号启动工作。由此可知,本技术实施例将震动触发信号作为开机及马达驱动模块500工作状态的间接控制信号,无需按键,因此本技术实施例提供的控制电路不仅能够进行较好的防水设计,还能够避免使用指纹或触摸感应开关机方式控制时出现的待机耗能现象。并且,主控模块100还用于根据电信号更新第一驱动信号,当主控模块100根据电信号确定马达驱动模块500空载,和/或空载时长大于预设时间阈值时,主控模块100将使开关模块400导通的第一驱动信号更新为使开关模块400关断的第一驱动信号,从而控制自动关机并使主控模块100和马达驱动模块 500断电停止工作,实现关机零功耗。因此,本技术实施例提供的控制电路还能够降低电池 300的功耗,从而延长了电池300的可使用时长。
28.参照图1和图2,在一些实施例中,开关驱动模块200包括震动开关sw1、第一电阻 r1、第一三极管q1、第二电阻r2和第一电容c1。震动开关sw1用于与电池300连接,震动开关sw1用于接收震动触发信号,并根据震动触发信号生成子信号,以为开关模块400 提供瞬间导通给主控模块100和马达驱动模块500传输电源的信号。第一电阻r1的一端与震动开关sw1连接。第一三极管q1的基极与第一电阻r1的另一端连接,第一三极管q1 的发射极接地,第一三极管q1的集电极与开关模块400连接,其中,第一三极管q1用于根据子信号生成第一驱动信号。第二电阻r2的一端与第一三极管q1的基极连接,第二电阻r2的另一端与主控模块100的第一端口pwr连接。第一电容c1的一端与第一三极管 q1的基极连接,第一电容c1的另一端接地。
29.可以理解的是,震动开关sw1为震动传感器,震动开关sw1为弹簧型震动感应触发开关。震动开关sw1用于感应震动力(即震动触发信号)的大小,并将根据该震动力大小产生的感应结果(即子信号)传输至与其连接的电路装置,从而为电路通断提供触发信号。当甩
动震动开关sw1的速度大于或等于预设离心力时,震动开关sw1内部的导电接脚将瞬间导通。此时,电池300产生的电源经震动开关sw1、偏置第一电阻r1传输至第一三极管 q1的基极,以驱动第一三极管q1导通。开关模块400跟随第一三极管q1的导通而导通,使得电源通过开关模块400传输至主控模块100和马达驱动模块500,此时马达驱动模块500 根据该电源和主控模块100提供的第二驱动信号启动工作。
30.当主控模块100根据采样模块600生成的电信号确定马达驱动模块500空载、和/或空载时长大于预设时间阈值时,主控模块100的第一端口pwr输出低电压信号,低电压信号通过第二电阻r2传输至第一三极管q1的基极,以驱动第一三极管q1关断。开关模块400 跟随第一三极管q1的关断而关断,此时主控模块100和马达驱动模块500断电,进入关机状态停。
31.其次,为了保证停止甩动震动开关sw1后,主控模块100和马达驱动模块500仍保持启动持续的供电和工作状态,主控模块100通过在甩动震动开关sw1驱动开关模块400瞬间导通、电源上电期间,通过第一端口pwr输出高电平的驱动信号,以保持开关模块400 的导通状态,维持电池300对马达驱动模块500的持续供电。
32.在本技术实施例中,可选择第一三极管q1为npn型三极管。电池300可选用两节干电池或单节3.7v锂电池,为主控模块100提供可正常工作的电压。震动开关sw1采用常开型,且内部滚珠带有弹簧阻尼器,即甩动震动开关sw1的速度大于或等于预设离心力时,滚珠才会与内部的电极弹片接触导通,从而防止了剃须时电动剃须刀正常移动或倾斜放置时所导致的误触发导通。可以理解的是,当外力消失后,需自行恢复与震动开关sw1连接的电路装置的关断状态。因此,震动开关sw1可选用耐电流不低于2ma的sw-18010p等型号的弹簧型震动感应触发开关,第一三极管q1可选用3904、8050、9014等贴片sot23封装的 npn型三极管,第一电阻r1和第二电阻r2可选用阻值为4.7kω~10kω中任一数值的电阻,第一电容c1可选用100nf的贴片电容。
33.在一些实施例中,开关模块400包括第二mos管q2、第三电阻r3、第四电阻r4和第二电容c2,第二mos管q2的源极与电池300连接,第二mos管q2的漏极与马达驱动模块500连接。第三电阻r3的一端与电池300连接,第三电阻r3的另一端与第二mos管 q2的栅极连接。第四电阻r4的一端与第二mos管q2的栅极连接,第四电阻r4的另一端与第一三极管q1的集电极连接。第二电容c2的一端与第二mos管q2的漏极连接,第二电容c2的另一端接地。其中,第二mos管q2用于根据第一驱动信号和电源切换导通状态。
34.具体地,当第一驱动信号为第一三极管q1导通而生成的信号时,第二mos管q2的栅极通过第四电阻r4、第一三极管q1与地端连接。此时,第二mos管q2导通,电池300 提供的电源通过第二mos管q2传输至主控模块100和马达驱动模块500,马达驱动模块 500根据该电源和主控模块100提供的第二驱动信号启动工作。当第一驱动信号为第一三极管q1关断而生成的信号时,第二mos管q2关断,主控模块100和马达驱动模块500因无法得到电源而无法启动,此时为关机状态。
35.在本技术实施例中,第二mos管q2为pmos管,如选用耐电流不低于4.4a、源极与漏极之间耐压为30v、nce3401等型号的贴片sot23封装的p沟道mosfet管。第三电阻 r3可选用阻值为100kω~200kω中任一数值的电阻,第四电阻r4可选用阻值为4.7kω~10k ω中任一数值的电阻,第二电容c2选用10μf、耐压16v的贴片电容。
36.在一些实施例中,马达驱动模块500包括马达m、第三mos管q3、二极管d1和第五电阻r5。马达m的一端与第二mos管q2的漏极连接。第三mos管q3的漏极与马达m 的另一端连接,第三mos管q3的栅极与主控模块100的第二端口mt连接,第三mos管 q3的源极与采样模块600连接。二极管d1的负极与马达m的正极连接,二极管d1的正极与马达m的负极连接。第五电阻r5的一端与第三mos管q3的栅极连接,第五电阻r5 的另一端接地。其中,马达m用于根据电源和第二驱动信号切换工作状态。
37.具体地,马达m、第三mos管q3、采样模块600依次串联连接。马达驱动模块500 的工作状态即马达m的工作状态,因此,当第二mos管q2导通时,电源通过第二mos 管q2分别向马达m、主控模块100供电,主控模块100得电后通过第二端口mt输出高电平的第二驱动信号,此时第三mos管q3导通,马达m启动工作,即电动剃须刀启动工作。当第二mos管q2关断时,马达m和主控模块100均无供电信号,此时马达m处于未工作状态,即电动剃须刀处于关机状态。
38.在本技术实施例中,第三mos管q3为nmos管,如选用耐电流不低于5a、漏极与源极之间耐压为30v、a03400、ap2306等型号的贴片sot23封装的n沟道mos管。当电池 300选用两节干电池时,马达m可选用额定工作电压为3.0v、额定工作电流为220ma等类型的直流有刷电机;当电池300选用单节3.74v锂电池时,马达m可选用额定工作电压为 3.7v、额定工作电流为250ma~300ma等类型的直流有刷电机。二极管d1可选用ss24、ss34 等型号的肖特基二极管d1,第五电阻r5可选用阻值为10kω~100kω中任一数值的电阻。
39.在一些实施例中,采样模块600包括第六电阻r6、第七电阻r7和第三电容c3。第六电阻r6的一端与第三mos管q3的源极连接,第六电阻r6的另一端接地。第七电阻r7 的一端与第六电阻r6的一端连接,第七电阻r7的另一端与主控模块100的第三端口ad 连接,第三电容c3的一端与第七电阻r7的另一端连接,第三电容c3的另一端与第六电阻r6的另一端连接。
40.具体地,第六电阻r6串联于第三mos管q3与地端的连接路径上,因此第六电阻r6 为采样电阻。第七电阻r7、第三电容c3用于对第六电阻r6两端的电压信号进行滤波,主控模块100的第三端口ad通过第三电容c3获取滤波后第六电阻r6两端的电压,以确定马达驱动模块500是否存在空载,和/或确定空载时长是否大于预设时间阈值。当确定马达驱动模块500空载,和/或确定空载时长大于预设时间阈值时,主控模块100的第二端口mt 输出低电平的第二驱动信号,以关断第三mos管q3控制马达m停止工作,同时主控模块 100的第一端口pwr输出低电平的驱动信号,以控制第一三极管q1关断,即改变第一驱动信号的信号类型,从而控制第二mos管q2关断,使得主控模块100和马达驱动模块500 都处于断电的关机状态。
41.可以理解的是,马达m空载时的工作电流小于电动剃须刀与人体接触时的工作电流,因此设定一个采样阈值,该采样阈值小于电动剃须刀与人体接触时的采样电压。当第六电阻 r6的采样电压小于采样阈值时,视为马达处于空载状态,即电动剃须刀未与人体接触;当第六电阻r6的采样电压大于采样阈值,视为电动剃须刀与人体接触;当第六电阻r6的采样电压小于采样阈值,且小于时长大于预设时间阈值时,视为电动剃须刀长时间未与人体接触,此时,为了降低电池300功耗,通过主控模块100的第一端口pwr控制第二mos管 q2关断对主控模块100和马达m的供电,进入关机状态,功耗为零。
42.可以理解的是,当电动剃须刀因内积聚毛发、杂质等而卡住刀头正常运行时,马达m 堵转,马达m堵转时的工作电流将达到最大电流数值。因此,还可以通过第六电阻r6确定马达m是否发生堵转,当确定马达m发生堵转,且堵转持续时长大于2秒时,主控模块100 的第二端口mt输出低电平的第二驱动信号,以控制马达m停止工作,同时主控模块100 的第一端口pwr输出低电平的第一驱动信号,以控制第二mos管q2关断,使得马达m 和主控模块100均恢复为断电的关机状态。
43.可以理解的是,主控模块100至少包括一个ad检测端口和两个i/o口,主控模块100 的工作电压范围为2.2v~5.5v,主控模块100的rom空间不低于1k,主控模块100可选用 mdt10f272、ht66f002等型号的sop8脚封装的单片机。第六电阻r6可选用阻值为0.01 ω、精度为
±
1%、封装为1210的贴片精密电阻,第七电阻r7可选用阻值为1kω~2.2kω中任一数值的电阻,第三电容c3可选用100nf的贴片电容。
44.本技术实施例还提供了一种电动剃须刀,该电动剃须刀包括如上述任一实施例所描述的控制电路。
45.可见,上述控制电路实施例中的内容均适用于本电动剃须刀实施例中,本电动剃须刀实施例所具体实现的功能与上述控制电路实施例相同,并且达到的有益效果与上述控制电路实施例所达到的有益效果也相同。
46.可以理解的是,电动剃须刀指能够进行剃须的组件,电动剃须刀包括静刀、动刀、固定件等结构,电动剃须刀的具体结构可根据实际应用进行适应性修改,本技术实施例不做具体限定。
47.本技术实施例提供的控制电路及电动剃须刀实现了甩动开机启动工作,与人体不接触时自动关机的智能控制,而且关机零功耗。因此,本技术实施例提供的控制电路及电动剃须刀避免了使用触摸或指纹识别等开机方式所存在的待机功耗问题,以及按键式开关所带来的,不利于防水设计的缺点,并延长了电动剃须刀电池的可使用时长。
48.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。此外,在不冲突的情况下,本实用新型的实施例及实施例中的特征可以相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1