冷却介质流路体、冷却装置、机器人及向机器人安装冷却装置的方法与流程
1.本发明涉及冷却介质流路体、冷却装置、机器人以及向机器人安装冷却装置的方法。
背景技术:
2.已知一种以有效地冷却减速装置为目的的多关节型机器人(例如,参照专利文献1)。在专利文献1所公开的多关节型机器人中,通过将在内部具有冷却水的流路的冷却用部件一体地组装在减速装置上,能够有效地冷却减速装置。
3.现有技术文献
4.专利文献1:日本特开2009-233824号公报
技术实现要素:
5.发明所要解决的课题
6.但是,在上述专利文献1所公开的多关节型机器人中,在冷却现有的机器人(例如设置于工厂等的机器人)的减速装置时,作业员需要将减速装置从机器人上拆卸下来,从提高作业效率的观点来看,目前还有改善的余地。
7.另外,在专利文献1所公开的多关节型机器人中,由于冷却用部件在远离电机的位置一体地组装在减速装置上,所以不能通过组装在减速装置上的冷却用部件有效地冷却电机。因此,在专利文献1所公开的多关节型机器人中,在电机上另外安装有冷却用部件。因此,存在机器人的制造成本高的课题。
8.本发明是解决上述现有课题的发明,其目的在于提供一种冷却介质流路体、冷却装置、机器人及向机器人安装冷却装置的方法,其能够减轻作业员的负担,提高冷却装置的安装作业的效率和/或降低制造成本。
9.用于解决课题的方案
10.为了解决上述现有课题,本发明的冷却介质流路体是用于机器人的关节部的冷却介质流路体,所述机器人的关节部具有构成第n连杆的第1隔壁和构成第n+1连杆的第2隔壁,在所述第1隔壁上配置有电机,该冷却介质流路体形成为环状或者筒状,以与所述第1隔壁抵接,并且其内周面位于比所述电机的外周面更靠外侧的方式构成,在其内部形成有供冷却介质流通的冷却介质流路。
11.由此,能够简单地对现有的机器人安装冷却介质流路体,从而能够减轻作业员的负担,提高冷却装置(冷却介质流路体)的安装作业的效率。
12.此外,冷却介质流路体以覆盖电机的外周面的方式配置,所以能够有效地冷却电机。进而,在第1隔壁的第n+1连杆侧配置有减速装置的情况下,能够通过来自第1隔壁的传热有效地冷却减速装置。因此,能够冷却电机和减速装置两者,所以与上述专利文献1所公开的多关节型机器人相比,能够降低制造成本。
13.此外,本发明的冷却装置被构成为,具备:所述冷却介质流路体、与所述冷却介质流路体连接的冷却介质循环流路、散热器、送出器及风扇,所述散热器及所述送出器被设置在所述冷却介质循环流路的中途,所述风扇对所述散热器进行空气冷却。
14.由此,能够简单地对现有的机器人安装冷却装置,从而能够减轻作业员的负担,提高冷却装置的安装作业的效率。
15.此外,由于冷却介质流路体以覆盖电机的外周面的方式配置,所以能够有效地冷却电机。进而,在第1隔壁的第n+1连杆侧配置有减速装置的情况下,能够通过来自第1隔壁的传热有效地冷却减速装置。因此,能够冷却电机和减速装置两者,所以与上述专利文献1所公开的多关节型机器人相比,能够降低制造成本。
16.此外,本发明的机器人具备所述冷却装置。
17.由此,由于冷却介质流路体以覆盖电机的外周面的方式配置,所以能够有效地冷却电机。进而,在第1隔壁的第n+1连杆侧配置有减速装置的情况下,能够通过来自第1隔壁的传热有效地冷却减速装置。因此,能够冷却电机和减速装置两者,所以与上述专利文献1所公开的多关节型机器人相比,能够降低制造成本。
18.进而,在本发明的向机器人安装冷却装置的方法中,所述机器人的关节部被配置为,具有构成第n连杆的第1隔壁和构成第n+1连杆的第2隔壁,在作为所述第1隔壁的所述第n连杆侧的壁面的第1壁面上形成有筒状的突出部,并且所述电机位于所述突出部的内侧,在作为所述第1隔壁的所述第n+1连杆侧的壁面的第2壁面上配置有减速装置,所述冷却装置形成为环状或筒状,具备:在其内部形成供冷却介质流通冷却介质流路的冷却介质流路体、与所述冷却介质流路体连接的冷却介质循环流路、散热器、送出器、风扇和基座,所述散热器及所述送出器被设置在所述冷却介质循环流路的中途,所述风扇对所述散热器进行空气冷却,所述用于机器人的关节部的冷却装置的安装方法包括:(a)在所述基座上安装所述散热器、所述送出器及所述风扇;(b)使所述冷却介质流路体的内部空间插入所述电机,且使该冷却介质流路体与所述第1隔壁的所述第1壁面抵接;(c)将安装有所述散热器、所述送出器及所述风扇所述基座安装在所述主体部和/或所述电机上;以及(d)通过所述冷却介质循环流路来连接所述冷却介质流路体、所述散热器及所述送出器。
19.由此,能够简单地对现有的机器人安装冷却装置,从而能够减轻作业员的负担,提高冷却装置的安装作业的效率。
20.此外,由于冷却介质流路体以覆盖电机的外周面的方式配置,所以能够有效地冷却电机。进而,由于在第1隔壁的第n+1连杆侧配置有减速装置,所以能够通过来自第1隔壁的传热有效地冷却减速装置。因此,能够冷却电机和减速装置两者,所以与上述专利文献1所公开的多关节型机器人相比,能够降低制造成本。
21.此外,在本发明的向机器人安装冷却装置的方法中,所述机器人的关节部被配置为,具有构成第n连杆的第1隔壁和构成第n+1连杆的第2隔壁,在作为所述第1隔壁的所述第n连杆侧的壁面的第1壁面上形成有筒状的突出部,并且所述电机位于所述突出部的内侧,在作为所述第1隔壁所述第n+1连杆侧的壁面的第2壁面上配置有减速装置,所述冷却装置形成为环状或筒状,具备:在其内部形成供冷却介质流通冷却介质流路的冷却介质流路体、与所述冷却介质流路体连接的冷却介质循环流路、散热器、送出器、风扇和基座,所述散热器及所述送出器被设置在所述冷却介质循环流路的中途,所述风扇对所述散热器进行空气
冷却,所述用于机器人的关节部的冷却装置的安装方法包括:(e)使所述冷却介质流路体的内部空间插入所述电机,且使该冷却介质流路体与所述第1隔壁的所述第1壁面抵接;(f)将所述基座安装在所述主体部和/或所述电机上;(g)在所述基座上安装所述散热器、所述送出器及所述风扇;以及(h)通过所述冷却介质循环流路来连接所述冷却介质流路体、所述散热器及所述送出器。
22.由此,能够简单地对现有的机器人安装冷却装置,从而能够减轻作业员的负担,提高冷却装置的安装作业的效率。
23.此外,由于冷却介质流路体以覆盖电机的外周面的方式配置,所以能够高效地冷却电机。进而,由于在第1隔壁的第n+1连杆侧配置有减速装置,所以能够通过来自第1隔壁的传热有效地冷却减速装置。因此,能够冷却电机和减速装置两者,所以与上述专利文献1所公开的多关节型机器人相比,能够降低制造成本。
24.本发明的上述目的、其他目的、特征及优点在参照附图的情况下,根据以下优选实施方式的详细说明而变得明确。
25.发明效果
26.根据本发明的冷却介质流路体、冷却装置、机器人及向机器人安装冷却装置的方法,能够减轻作业员的负担,提高冷却装置的安装作业的效率,和/或降低制造成本。
附图说明
27.图1是表示本实施方式1的机器人的概要结构的示意图。
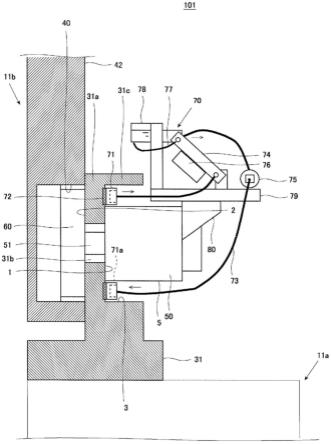
28.图2是表示图1所示的机器人的关节部(第2关节)的概要结构的示意图。
29.图3是表示图2所示的冷却装置的冷却介质流路体的概要结构的示意图。
30.图4是表示本实施方式1的冷却装置的安装方法的一例的流程图。
31.图5是表示本实施方式1的变形例1的机器人的概要结构的示意图。
32.图6是表示本实施方式2的冷却装置的安装方法的一例的流程图。
具体实施方式
33.下面,参照附图的同时对本发明的实施方式进行说明。另外,在所有的附图中,对相同或相应的部分标注相同的符号,省略重复的说明。此外,有时在所有的附图中,选出了用于说明本发明的结构要素来进行图示,而对其他的结构要素省略图示。此外,本发明不限于以下的实施方式。
34.(实施方式1)
35.本实施方式1的冷却介质流路体是用于机器人的关节部的冷却介质流路体,机器人的关节部具有构成第n连杆的第1隔壁和构成第n+1连杆的第2隔壁,在第1隔壁上配置有电机,该冷却介质流路体形成为环状或筒状,以与第1隔壁抵接,且其内周面位于比电机的外周面更靠外侧的方式构成,在其内部形成供冷却介质流通的冷却介质流路。
36.另外,n是0以外的自然数。
37.此外,在本实施方式1的冷却介质流路体中,也可以是,在第1隔壁上设置突出部,电机位于突出部的内侧的方式配置,且以冷却介质流路体的外周面位于比突出部的内周面更靠内侧的方式配置。
38.此外,在本实施方式1的冷却介质流路体中,突出部也可以形成为筒状。
39.此外,在本实施方式1的冷却介质流路体中,冷却介质也可以是水或防冻液。
40.此外,本实施方式1的冷却装置被构成为,具备冷却介质流路体、与冷却介质流路体连接的冷却介质循环流路、散热器、送出器和风扇,其中散热器及送出器被设置在冷却介质循环流路的中途,风扇对散热器进行空气冷却。
41.此外,在本实施方式1的冷却装置中,也可以是,散热器、送出器、风扇载置在基座上。
42.此外,在本实施方式1的冷却装置中,也可以是,在第1隔壁上配置电机,基座安装在电机上。
43.此外,本实施方式1的机器人具备上述冷却装置。
44.此外,在本实施方式1的机器人中,也可以是,机器人为多轴垂直多关节机器人,在将机器人的基端侧的关节部的轴定义为第1轴时,冷却装置配置在机器人的第1轴~第3轴中的至少一个轴上。
45.此外,在本实施方式1的机器人中,也可以是,在作为第1隔壁的第n连杆侧的壁面的第1壁面配置有电机,在作为第1隔壁的第n+1连杆侧的壁面的第2壁面配置有减速装置,冷却介质流路体以包围电机的方式配置在第1壁面上。
46.此外,在本实施方式1的机器人中,也可以是,在冷却介质流路体与第1壁面之间配置传热剂。
47.此外,在本实施方式1的机器人中,也可以是,冷却介质循环流路配置在第n连杆内。
48.进而,本实施方式1向机器人安装冷却装置的方法是用于机器人的关节部的冷却装置的安装方法,机器人的关节部具有构成第n连杆的第1隔壁和构成第n+1连杆的第2隔壁,以在作为第1隔壁的第n连杆侧的壁面的第1壁面形成有筒状突出部,并且电机位于突出部的内侧的方式配置,在作为第1隔壁的第n+1连杆侧的壁面的第2壁面配置有减速装置,冷却装置形成为环状或筒状,具备:在其内部形成有供冷却介质流通的冷却介质流路的冷却介质流路体、与冷却介质流路体连接冷却介质循环流路、散热器、送出器、风扇和基座,其中散热器及送出器被设置在冷却介质循环流路的中途,风扇对散热器进行空气冷却,该冷却装置的安装方法包括:(a)在基座安装有散热器、送出器及风扇;(b)使冷却介质流路体的内部空间插述电机,且使该冷却介质流路体与第1隔壁的第1壁面抵接;(c)将安装有散热器、送出器及风扇基座安装在主体部和/或电机上;以及(d)通过冷却介质循环流路来连接冷却介质流路体、散热器及送出器。
49.以下,参照图1~图4对本实施方式1的机器人的一例进行说明。
50.【机器人的结构】
51.图1是表示本实施方式1的机器人的概要结构的示意图。另外,在图1中,将机器人的上下方向表示为图中的上下方向。
52.如图1所示,本实施方式1的机器人101为垂直多关节机械臂,其具备:多个连杆(在此为第1连杆11a~第6连杆11f)的连接体、多个关节部(在此为第1关节jt1~第6关节jt6)、支撑它们的基座15、和控制装置111的。
53.另外,在本实施方式1中,采用了6轴的垂直多关节型机器人作为机器人101,但不
限于此,只要是垂直多关节型机器人,也可以是7轴的垂直多关节型机器人。
54.在第1关节jt1中,基座15和第1连杆11a的基端部以可旋转地绕在竖直方向上延伸的轴的方式连结。在第2关节jt2中,第1连杆11a的前端部和第2连杆11b的基端部以可旋转地绕在水平方向上延伸的轴的方式连结。在第3关节jt3中,第2连杆11b的前端部和第3连杆11c的基端部以可旋转地绕在水平方向上延伸的轴的方式连结。
55.此外,在第4关节jt4中,第3连杆11c的前端部和第4连杆11d的基端部以可旋转地绕在第4连杆11d的长度方向上延伸的轴的方式连结。在第5关节jt5中,第4连杆11d的前端部和第5连杆11e的基端部以可旋转地绕与第4连杆11d的长度方向正交的轴的方式连结。在第6关节jt6中,第5连杆11e的前端部和第6连杆11f的基端部以可扭转旋转的方式连结。
56.并且,在第6连杆11f的前端部设置有机械接口。在该机械接口上以可装卸的方式安装有与作业内容对应的末端执行器20。
57.此外,在第1关节jt1~第6关节jt6上分别设置有作为使各关节连结的两个部件相对旋转的致动器的一例的电机(参照图2)。电机例如也可以是由控制装置111伺服控制的伺服电机。另外,在第1关节jt1~第6关节jt6上分别设置有检测驱动电机的旋转位置的旋转传感器和检测对驱动电机的旋转进行控制的电流的电流传感器(分别未图示)。旋转传感器例如可以是编码器。
58.控制装置111配置在基座15(机器人101)外。另外,控制装置111也可以配置在基座15(机器人101)内。此外,控制装置111具有微处理器、cpu等运算处理器111a和rom、ram等存储器111b。在存储器111b中存储有基本程序、各种固定数据等信息。
59.运算处理器111a被构成为,通过读取并执行存储在存储器111b中的基本程序等软件,来执行机器人101的各种动作。
60.此外,控制装置111也可以被构成为,控制后述的冷却装置70的送出器75和/或风扇76。在这种情况下,控制器111也可以以随着流通于配置在各关节部上的电机中的电流的增减的方式来控制送出器75和/或风扇76。
61.具体而言,在使流通于电机中的电流增加时,控制装置111可以使得送出器75的送出量增加的方式来控制,和/或可以使得风扇76的操作量(转速)增加的方式来控制。此外,在使流通于电机的电流减少时,控制装置111可以使得送出器75的送出量减少的方式来控制,和/或可以使得风扇76的操作量(转速)减少的方式来控制。
62.另外,控制装置111可以由集中控制的单独的控制装置构成,也可以由相互协作、分散控制的多个控制装置构成。此外,控制装置111可以由微型计算机构成,也可以由mpu、plc(programmable logic controller可编程控制器)、逻辑电路等构成。
63.【冷却装置的结构】
64.接着,参照图2及图3对本实施方式1的机器人101的关节部所使用的冷却装置进行说明。
65.图2是表示图1所示的机器人的关节部(第2关节jt2)的概要结构的示意图。
66.如图2所示,在第2关节jt2中,第1连杆11a和第2连杆11b相连结。第1连杆11a具有主体部31。在主体部31上形成有板状的第1隔壁31a。另外,第2连杆11b具有第2隔壁42。
67.在第1隔壁31a上设有贯通孔31b。主体部31被配置成,贯通孔31b与设置在第2连杆11b上的凹部40连通。另外,以下说明中,将第1隔壁31a的第2连杆11b侧(一方)的壁面称为
第2壁面2,将第2壁面2的相反侧(第1连杆11a侧)的壁面称为第1壁面1。
68.在第1隔壁31a的第1壁面1上设置有筒状的突出部31c。此外,在第1壁面1上,以位于突出部31c的内侧且输出轴51插入贯通孔31b的方式配置有电机50。在电机50的输出轴51上连接有配置在凹部40内的减速装置60。减速装置60与第2连杆11b连接。另外,减速装置60可以使用公知的各种减速器。
69.由此,当驱动电机50旋转时,第2连杆11b能够相对于第1连杆11a摆动。
70.进而,在第1壁面1上,以包围电机50的外周面5的方式配置有本实施方式1的冷却介质流路体71。另外,也可以在第1壁面1和冷却介质流路体71之间配置传热剂72。作为传热剂72,例如可以是散热油脂(thermal grease,热传导油脂),也可以是散热用硅。
71.在此,参照图2及图3对冷却介质流路体71的结构进行说明。
72.图3是表示图2所示的冷却装置的冷却介质流路体的概要结构的示意图。另外,在图3中,将冷却介质流路体的上下方向表示为图中的上下方向。
73.如图2及图3所示,冷却介质流路体71形成为环状或筒状。冷却介质流路体71被构成为,外周面7a比突出部31c的内周面3更靠内侧,并且内周面7b比电机50的外周面5更靠外侧。
74.由此,作业员能够使冷却介质流路体71容易地插入于突出部31c与电机50之间的筒状空间。
75.此外,在冷却介质流路体71的内部形成有冷却介质流路71a。从电机50的输出轴51的轴心方向观察,冷却介质流路71a形成为大致c字状(环绕)。另外,冷却介质流路71a蜿蜒地形成在外周面7a和内周面7b之间的区域。
76.冷却介质流路71a的一端部(在图3中为下侧的端部)构成冷却介质的入口(供给口)71b,另一端部(在图3中为上侧的端部)构成冷却介质的出口(排出口)71c。此外,入口71b和出口71c通过冷却介质循环流路73连接。
77.另外,作为在冷却介质流路71a及冷却介质循环流路73内流通的冷却介质,例如可以是水、水溶液、防冻液(乙二醇、甘油、长效冷却剂(llc))。
78.在冷却介质循环流路73的中途设置有散热器74及送出器(泵)75。另外,在散热器74上设置有用于冷却该散热器74的风扇76。另外,在散热器74上也可以经由第1流路77设置箱体78。
79.从使冷却装置70紧凑化的观点出发,送出器75也可以设置在散热器74的下游侧。此外,从提高冷却装置70的冷却效率的观点出发,送出器75也可以配置在散热器74的上游侧。
80.另外,散热器74、送出器75及箱体78安装在大致l字状的基座79上。基座79与设置在电机50上的凸缘80连接(固定)。
81.【冷却装置的安装方法】
82.接着,参照图1~图4的同时对本实施方式1的冷却装置70的安装方法进行详细地说明。另外,以下的动作由作业员执行,但作业员也可以通过操作安装冷却装置70的机器人101以外的机器人来执行。
83.图4是表示本实施方式1的冷却装置的安装方法的一例的流程图。
84.另外,假设在配置于现有设备等的机器人上未安装本实施方式1的冷却装置70,下
面将说明在该机器人上安装冷却装置70的作业。
85.如图4所示,作业员在基座79上安装散热器74、送出器75及箱体78(步骤s101)。
86.接着,作业员将冷却介质流路体71安装在第1隔壁31a的第1壁面1上(步骤s102)。具体而言,作业员使冷却介质流路体71移动,以使冷却介质流路体71的内部空间插入电机50,并使该冷却介质流路体71与第1隔壁31a的第1壁面1抵接。然后,作业员通过适当的部件(例如螺栓等)将冷却介质流路体71安装(固定)在第1壁面1上。此时,作业员也可以在冷却介质流路体71的与第1壁面1的抵接面和/或第1壁面1的与冷却介质流路体71的抵接面上配置传热剂72。
87.另外,步骤s101的动作和步骤s102的动作没有先后顺序。
88.接着,作业员在步骤s101中将安装了散热器74、送出器75以及箱体78的基座79安装在凸缘80上(步骤s103)。然后,作业员通过构成冷却介质循环流路73的配管连接冷却介质流路体71(冷却介质流路71a的入口71b及出口71c)、散热器74及送出器75(步骤s104)。另外,作业员通过构成第1流路77的配管连接箱体78和散热器74。进而,作业员向箱体78等供给冷却介质,结束向机器人101安装冷却装置70的作业。
89.这样构成的本实施方式1的冷却介质流路体71形成为筒状或环状。由此,仅通过使电机50插入其内部空间,就能够安装在第1隔壁31a的第1壁面1上。
90.此外,本实施方式1的冷却介质流路体71(冷却装置70),仅通过拆下罩部件32,就能够将该冷却介质流路体71(冷却装置70)安装在关节部。即,为了将冷却介质流路体71(冷却装置70)安装在关节部,不需要拆卸(拆分)第n连杆(第1连杆11a的主体部31)及第n+1连杆。
91.因此,作业员能够容易地对现有的机器人(例如设置于工厂等的机器人)执行冷却介质流路体71(冷却装置70)的安装作业。
92.另外,由于本实施方式1的冷却介质流路体71配置在电机50的外侧,因此能够冷却电机50。另外,由于以与第1隔壁31a的第2壁面2抵接的方式配置减速装置60,所以冷却介质流路体71通过来自第1隔壁31a的传热,也能够冷却减速装置60。
93.因此,本实施方式1的冷却介质流路体71(冷却装置70)与需要配置分别对电机50和减速装置60进行冷却的冷却用部件的上述专利文献1所公开的多关节型机器人相比,能够降低制造成本。
94.而且,本实施方式1的冷却装置70被构成为,具备用于冷却被加热的冷却介质的散热器74,并且流路(冷却介质流路71a及冷却介质循环流路73)在机器人101的关节部内循环。
95.由此,不需要在机器人101的外部设置供冷却介质流通的流路(配管),从而能够实现机器人101的紧凑化,并且能够容易地对现有的机器人进行冷却装置70的安装作业。
96.即,作为工厂设备,可以在机器人101上设置冷却装置70,而不设置配管和/或冷却介质的贮存槽。因此,能够降低用于将冷却装置70安装到机器人101上的成本。
97.因此,具备本实施方式1的冷却介质流路体71(冷却装置70)的机器人101与上述专利文献1所公开的多关节型机器人相比,冷却效率好,并且能够降低制造成本。
98.另外,本实施方式1的机器人101也可以具有覆盖冷却装置70的罩部件。
99.【变形例1】
100.本实施方式1的变形例1的冷却装置,在构成第n连杆的第1隔壁上配置有电机,基座安装在第n连杆上。
101.下面,参照图5对本实施方式1的变形例1的机器人(冷却装置)的一例进行说明。
102.图5是表示本实施方式1的变形例1的机器人的概要结构的示意图。
103.如图5所示,本变形例1的机器人101与实施方式1的机器人系统100的基本结构相同,但基座79及凸缘80安装于第1连杆11a(在此为突出部31c)这一方面不同。
104.这样构成的本变形例1的机器人101(冷却装置70),也起到与实施方式1的机器人101(冷却装置70)同样的作用效果。
105.(实施方式2)
106.本实施方式2的向机器人安装冷却装置的方法是用于机器人的关节部的冷却装置的安装方法,机器人的关节部具有构成第n连杆的第1隔壁和构成第n+1连杆的第2隔壁,配置成在作为第1隔壁的第n连杆侧的壁面的第1壁面上形成有筒状突出部,并且电机位于突出部的内侧,在作为第1隔壁的第n+1连杆侧的壁面的第2壁面配置有减速装置,冷却装置形成为环状或筒状,其被构成为具备:在其内部形成有供冷却介质流通的冷却介质流路的冷却介质流路体、与冷却介质流路体连接的冷却介质循环流路、散热器、送出器、风扇和基座,其中散热器及送出器设置在冷却介质循环流路的中途,风扇对散热器进行空气冷却,该向机器人安装冷却装置的方法包括:(e)使冷却介质流路体的内部空间插入电机,且使该冷却介质流路体与第1隔壁的第1壁面抵接;(f)将基座安装在主体部和/或电机上;(g)在基座上安装散热器、送出器及风扇;以及(h)通过冷却介质循环流路来连接所述冷却介质流路体、散热器及送出器。
107.以下,参照图6对本实施方式2的向机器人安装冷却装置的方法的一例进行说明。另外,在本实施方式2的向机器人安装冷却装置的方法中使用的冷却介质流路体、冷却装置及机器人与实施方式1的机器人或变形例1的机器人同样地构成,因此省略其详细说明。
108.图6是表示本实施方式2的冷却装置的安装方法的一例的流程图。
109.另外,假设在配置于现有设备等的机器人上未安装本实施方式2的冷却装置70,下面说明在该机器人上安装冷却装置70的作业。
110.如图6所示,作业员将基座79安装在凸缘80上(步骤s201)。接着,作业员将冷却介质流路体71安装在第1隔壁31a的第1壁面1上(步骤s202)。另外,步骤s201的动作和步骤s202的动作并无先后顺序。
111.接着,作业员在基座79上安装散热器74、送出器75及箱体78(步骤s203)。然后,作业员通过构成冷却介质循环流路73的配管连接冷却介质流路体71(冷却介质流路71a的入口71b及出口71c)、散热器74及送出器75(步骤s204)。此外,作业员通过构成第1流路77的配管连接箱体78和散热器74。进而,作业员向箱体78等供给冷却介质,结束向机器人101安装冷却装置70的作业。
112.这样构成的本实施方式2的机器人101(冷却装置70),也起到与实施方式1的机器人101(冷却装置70)同样的作用效果。
113.根据上述说明,对于本领域技术人员来说,本发明的许多改进或其他实施方式是显而易见的。因此,上述说明仅应被解释为示例,并且是以教导本领域技术人员执行本发明的最佳的方式为目的而提供的。在不脱离本发明的情况下,其构成和/或功能的细节可以实
质上改变。
114.产业上的可利用性
115.根据本发明的冷却介质流路体、冷却装置、机器人及向机器人安装冷却装置的方法,能够减轻作业员的负担,提高冷却装置的安装作业的效率和/或降低制造成本,因此在机器人领域中是有用的。
116.标号说明
117.1 第1壁面
118.2 第2壁面
119.3 内周面
120.5 外周面
121.7a 外周面
122.7b 内周面
123.11a 第1连杆
124.11b 第2连杆
125.11c 第3连杆
126.11d 第4连杆
127.11e 第5连杆
128.11f 第6连杆
129.15 底座
130.20 末端执行器
131.31a 第1隔壁
132.31b 贯通孔
133.31c 突出部
134.31 主体部
135.40 凹部
136.42 第2隔壁
137.50 电机
138.51 输出轴
139.60 减速装置
140.70 冷却装置
141.71 冷却介质流路体
142.71a 冷却介质流路
143.71b 入口
144.71c 出口
145.72 传热剂
146.73 冷却介质循环流路
147.74 散热器
148.75 送出器
149.76 风扇
150.77 第1流路
151.78 箱体
152.79 底座
153.80 凸缘
154.101 机器人
155.111 控制装置
156.111a 运算处理器
157.111b 存储器
158.jt1 第1关节
159.jt2 第2关节
160.jt3 第3关节
161.jt4 第4关节
162.jt5 第5关节
163.jt6 第6关节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1