具有分布式致动器的真空环境机器人的制作方法
1.示例性和非限制性实施例总体上涉及一种具有分布式致动器的机器人,更具体地,涉及一种材料处理真空环境机器人,其具有分布在机器人结构内的致动器以降低机械复杂性并提高性能。
背景技术:
2.在图1a中示意性地示出了具有利用集中致动器的常规架构的示例材料处理真空环境机器人的简化截面图。示例性机器人包括机器人臂、驱动单元和控制系统。
3.示例性机器人的臂包括上臂和两个前臂,每个前臂承载端部执行器,这些端部执行器经由同轴旋转接头(称为肘关节)联接到上臂。上臂容纳两个滑轮系统,每个滑轮系统配置成致动两个前臂中的一个。
4.驱动单元容纳机器人的所有致动器。驱动单元包括主轴组件和z轴机构。z轴机构配置成使用电机mz上下移动主轴组件。主轴组件的特征在于三个同轴的轴和三个电机,每个电机配置成致动三个轴中的一个。外轴连接到上臂并由电机m
t1
致动。中间轴连接到与其中一个前臂相连的滑轮,并由电机m
t2
致动。内轴连接到与另一前臂相连的滑轮,并由电机m
t3
致动。
5.示例性机器人的特征在于在电机m
t1
、m
t2
和m
t3
的定子和转子之间的波纹管和圆柱形屏障,以容纳臂在其中操作的真空环境。波纹管配置成适应主轴组件的上下运动。
6.控制系统接收例如来自用户或主机系统的外部输入,从位置编码器(为简单起见在图1a中未示出)读取各个运动轴(电机)的位置,并处理该信息,以向电机施加电压,用以执行期望的运动和/或实现期望的位置。图1a的示例性机器人的操作在图1b中示意性地示出,其示出了处于缩回位置和各种伸出位置的示例性机器人。
技术实现要素:
7.根据一个方面,一种装置包括:驱动器;连接到所述驱动器的可移动臂,所述可移动臂包括在肩部处连接到所述驱动器的第一连杆、在肘部处连接到所述第一连杆的第二连杆、在腕部处连接到所述第二连杆的第三连杆、以及在所述腕部处连接到所述第二连杆的第四连杆;位于该第二连杆中的至少一个第一致动器,该第一致动器被配置成使得该第三连杆围绕该腕部旋转;以及位于所述第二连杆中的至少一个第二致动器,所述第二致动器被配置成使得所述第四连杆围绕所述腕部旋转。通过第二连杆实现热管理、功率分配或通信中的一个或多个。
8.根据另一方面,一种方法包括:提供驱动器;提供连接到所述驱动器的可移动臂,所述可移动臂包括在肩部处连接到所述驱动器的第一连杆、在肘部处连接到所述第一连杆的第二连杆、在腕部处连接到所述第二连杆的第三连杆、以及在所述腕部处连接到所述第二连杆的第四连杆;提供位于该第二连杆中的至少一个第一致动器,该第一致动器被配置成使得该第三连杆围绕腕部旋转;以及提供位于所述第二连杆中的至少一个第二致动器,
所述第二致动器被配置成使得所述第四连杆围绕所述腕部旋转。通过第二连杆实现热管理、功率分配或通信中的一个或多个。
9.一种装置,包括至少一个处理器;以及包括计算机程序代码的至少一个非暂时性存储器,该至少一个存储器和该计算机程序代码被配置成与该至少一个处理器一起使得该装置至少执行:移动连接到驱动器的臂,所述臂包括在肩部处连接到驱动器的第一连杆、在肘部处连接到第一连杆的第二连杆、在腕部处连接到第二连杆的第三连杆、以及在腕部处连接到第二连杆的第四连杆;通过位于第二连杆中的至少一个第一致动器使得第三连杆围绕腕部旋转;以及通过位于所述第二连杆中的至少一个第二致动器使得所述第四连杆围绕所述腕部旋转。通过第二连杆实现热管理、功率分配或通信机构中的一个或多个。
10.根据另一方面,一种装置包括:驱动器;可移动臂,该可移动臂包括:第一连杆,该第一连杆具有第一控制件并且围绕该驱动器可旋转;第二连杆,该第二连杆具有第二控制件并且在第一旋转接头处连接到该第一连杆;以及至少一个第三连杆,该第三连杆在第二旋转接头处联接到该前臂;至少一个第一致动器,该第一致动器位于该第一连杆中并且被配置成使得该第二连杆围绕该第一旋转接头旋转;至少一个第二致动器,该第二致动器位于该第二连杆中并且被配置成使得该至少一个第三连杆围绕该第二旋转接头旋转;以及与所述至少一个第三连杆相关联的至少一个有源组件。通过第二旋转接头实现热管理、功率分配或通信中的一个或多个,以使至少一个有源部件与第二连杆的第二控制件相互作用。
11.根据另一方面,一种方法包括:提供驱动器;提供可移动臂,该可移动臂包括:第一连杆,该第一连杆具有第一控制件并且被连接到该驱动器并且可围绕该驱动器旋转;第二连杆,该第二连杆具有第二控制件并且在第一旋转接头处被连接到该第一连杆;以及至少一个第三连杆,该第三连杆在第二旋转接头处被联接到该前臂;提供至少一个第一致动器,该第一致动器位于该第一连杆中并且被配置成使得该第二连杆围绕该第一旋转接头旋转;提供至少一个第二致动器,该第二致动器位于该第二连杆中并且被配置成使得该至少一个第三连杆围绕该第二旋转接头旋转;以及提供与所述至少一个第三连杆相关联的至少一个有源部件。通过第二旋转接头实现热管理、功率分配或通信中的一个或多个,以使至少一个有源部件与第二连杆的第二控制件相互作用。
12.根据另一方面,一种装置包括:驱动器;连接到所述驱动器的可移动臂,所述可移动臂包括:在肩部可旋转地联接到所述驱动器的上臂,所述上臂具有位于所述上臂内的第一致动器;可旋转地联接到所述上臂的前臂,所述前臂具有位于所述前臂内的第二致动器和第三致动器;在旋转接头处可旋转地联接到所述前臂并被配置成由所述第二致动器移动的第一对末端执行器;以及在所述旋转接头处可旋转地联接到所述前臂并被配置成由所述第三致动器移动的第二对末端执行器。第一对末端执行器被配置为独立于第二对末端执行器移动。至少第二致动器和第三致动器被配置成由控制件控制,其中该控制件被配置成控制对第一对末端执行器和第二对末端执行器的热管理、功率分配或通信中的一个或多个。
13.根据另一方面,一种方法包括:测量机器人的相应的至少一个结构部件的至少一个温度;使用所测量的至少一个温度来估算该至少一个结构部件的尺寸;基于所述至少一个结构部件的所述估计尺寸,计算与所述机器人的末端执行器的期望目的地相对应的关节坐标;基于所计算的关节坐标组计算所述末端执行器的最终目的地;确定从计算出的所述末端执行器的最终目的地到计算出的所述末端执行器的期望目的地的轨迹;确定在所确定
的轨迹上的多个中间点;以及使用在所确定的轨迹上的所确定的多个中间点来控制引起所述末端执行器运动的至少一个电机。
14.根据另一方面,一种装置包括:至少一个处理器;以及包括计算机程序代码的至少一个非暂时性存储器,该至少一个存储器和该计算机程序代码被配置成与该至少一个处理器一起使得该装置至少执行:测量机器人的相应的至少一个结构部件的至少一个温度;使用所测量的至少一个温度来估算该至少一个结构部件的尺寸;基于所述至少一个结构部件的所述估计尺寸计算与所述机器人的末端执行器的期望目的地相对应的一组关节坐标;基于所计算的关节坐标组计算所述末端执行器的最终目的地;确定从计算出的所述末端执行器的最终目的地到计算出的所述末端执行器的期望目的地的轨迹;确定在所确定的轨迹上的多个中间点;以及使用在所确定的轨迹上的所确定的多个中间点来控制引起所述末端执行器运动的至少一个电机。
15.根据另一方面,一种机器可读的非瞬态程序存储设备,其有形地包含可由所述机器执行的用于执行操作的指令的程序,包括以下操作:测量机器人的相应的至少一个结构部件的至少一个温度;使用所测量的至少一个温度来估算该至少一个结构部件的尺寸;基于所述至少一个结构部件的所述估计尺寸计算与所述机器人的末端执行器的期望目的地相对应的一组关节坐标;基于所计算的关节坐标组计算所述末端执行器的最终目的地;确定从计算出的所述末端执行器的最终目的地到计算出的所述末端执行器的期望目的地的轨迹;确定在所确定的轨迹上的多个中间点;以及使用在所确定的轨迹上的所确定的多个中间点来控制引起所述末端执行器运动的至少一个电机。
附图说明
16.在以下结合附图的描述中解释了前述方面和其他特征,其中:
17.图1a是具有传统架构的材料处理真空环境机器人的示意图;
18.图1b是图1a的机器人处于缩回位置和各种伸出位置的示意图;
19.图2a和2b是具有分布式致动器的材料处理真空环境机器人的示例性实施例的示意图;
20.图3a至3c是示出了热传递方面的机器人的示意图;
21.图4a和4b是经由机器人中的圆柱形表面的热传递的示意图;
22.图4c是经由机器人中的热管的热传递的示意图;
23.图4d是用于机器人的感应功率耦合器的示例性配置的示意图;
24.图4e是用于机器人的光学通信链路的示例性配置的示意图;
25.图4f是与旋转功率耦合器组合以形成集成旋转耦合组件的光学通信链路的示意图;
26.图5是利用射频通信系统的示例性机器人的示意图;
27.图6是示例性机器人的示意图,其中通信信号通过功率耦合器被路由;
28.图7是示例性机器人的示意图,其中使用多通道电馈通件和真空兼容服务回路将功率和通信信号从大气环境路由到真空环境;
29.图8a是利用真空兼容多通道电旋转耦合器的示例性机器人的示意图;
30.图8b和8c是用于机器人的示例性电容性旋转耦合器的示意图;
31.图9是示例性机器人的示意图,其中上臂的内部容腔被密封并填充有气体;
32.图10是示例机器人的示意图,其中通信和冷却总成利用由服务回路连接的两个馈通件来传输功率和通信信号;
33.图11a是图10的示例性机器人的示意图,其中馈通件之间的服务回路由多介质旋转耦合器代替;
34.图11b是利用真空兼容服务回路的图10的示例性机器人的示意图;
35.图11c(a)、11c(b)、11d(a)和11d(b)是图11a和11b的服务回路的示意图,其中服务回路包括一个或多个管;
36.图11e是图11c(a)、11c(b)、11d(a)和11d(b)的服务回路的示意图,其中服务回路在每一端处经由枢转接头与波纹管连接;
37.图11f是包括一系列波纹管、枢转支撑件和附接到半圆形支撑件的线缆和/或软管的真空兼容服务回路的示例的示意图;
38.图12是包含有动态密封件的机器人的示例的示意图;
39.图13是图12的机器人的示意图,其中服务回路由多介质旋转耦合器代替;
40.图14是示例性机器人的示意图,其包含有在机器人的上臂和主轴组件之间的动态密封件,并且还包含有用于上臂和主轴组件的壳体的相对旋转的服务回路;
41.图15a是图14的机器人的示意图,其中服务回路由多介质旋转耦合器代替;
42.图15b是图14的机器人的示意图,其中气体供应管用于将气体输送到上臂,气体供应管相对于壳体静止;
43.图15c是图14的机器人的示意图,其中气体供应管相对于驱动单元的基座是固定的;
44.图15d是利用机器人外部的气体供应的示例性机器人的示意图;
45.图15e是具有三连杆臂的示例性机器人的示意图;
46.图15f(a)、15f(b)和15f(c)是示例性肘旋转热耦合总成的示意图;
47.图15g是具有热扼流器和旋转热耦合器的图15e的机器人的示意图;
48.图15h是图15g的机器人的热模型的流程图;
49.图15i是图15g的机器人的热模型的示意图,其扩展到具有带两轴腕关节的机器人臂的示例性机器人;
50.图15j(a)、15j(b)和15j(c)是利用感应功率耦合器总成的图15i的热模型的示意图;
51.图15k(a)和15k(b)是具有分布式致动器并包含了热管理、功率分配和通信方案的示例性机器人的示意图;
52.图15l(a)是示例性机器人的电机的转子和定子的示意图;
53.图15l(b)是示例性机器人的电机的转子和定子的示意图,该电机具有磁屏蔽件;
54.图16是具有控制系统架构的示例性机器人的示意图,其中主控制器位于机器人驱动单元的外部;
55.图17是示例性机器人的示意图,其中机器人驱动单元内部的集中式控制器接收信号和功率;
56.图18a是示例性机器人的示意图,其中机器人驱动单元外部的集中式控制器接收
信号和功率;
57.图18b是包含附加有源部件的示例性机器人的示意图;
58.图18c是示出示例性机器人的示例性运动的曲线图;
59.图19a至19c是包含了功率、通信、冷却总成和控制系统架构的不同组合的示例性机器人的示意图;
60.图20和21是示出机器人臂和驱动单元之间的电机的位移的配置示意图;
61.图22和23是示例性机器人的示意图,其中电机具有在相应定子的外部的转子;
62.图24至27a是示例性机器人的示意图,其中功率、通信和/或冷却总成扩展到在机器人臂中的电机和机器人臂的第一连杆之间的移动关节;
63.图27b和27c是具有四个末端执行器的示例性机器人的示意图;
64.图27d是图27b和27c的机器人的操作的示意图;
65.图28a至28c是示例性机器人的示意图,其具有两个臂,并且包含了功率、通信、冷却总成以及控制系统架构的不同组合;
66.图28d是图28a的示例性机器人的示意图,示出了处于缩回位置和各种伸出位置的机器人;以及
67.图29a和29b是示例性机器人的操作的示意图,示出了各种机器人的臂的各种缩回位置和伸出位置。
具体实施方式
68.参考图1a,一个示例性机器人总体上以10示出,并且在下文中被称为“机器人10”。机器人10包括联接到驱动单元14的机器人臂12,机器人臂12位于真空环境中并可在真空环境中操作,驱动单元14位于大气环境中。机器人臂12包括上臂18、在上臂18上的至少一个前臂20、以及在每个前臂20上的相应的末端执行器22,末端执行器22被配置为接受有效载荷。驱动单元14包括联接到上臂18的主轴组件36、用于上下移动主轴组件36的z轴机构38、以及一个或多个电机形式的致动器32。波纹管24可用于容纳在操作机器人臂12的空间中的真空环境。控制系统26用于控制机器人臂12的操作。机器人臂12可以从缩回位置延伸到各种延伸位置,如图1b所示。
69.机器人10可以被视为机械上复杂的,因为它采用了大量的精密机械部件,例如轴承和滑轮,这限制了机器人的性能(例如定位精度)。由于这个原因,具有集中式致动器的架构不能很好地扩展到具有更多运动轴的配置,这些运动轴是由越来越多的应用所要求的(见下面的例子)。
70.本发明的目的是将一些致动器32(电机)从驱动单元14重新定位到机器人臂12,以便降低机械复杂性并提高性能。由于机器人臂12在真空环境中操作,因此需要应对多个技术挑战,包括密封、功率输送、通信和散热(冷却)。
71.参见图2a,具有分布式致动器的机器人总体上以110示出,并且在下文中被称为“机器人110”。机器人110是材料处理真空环境机器人的一个示例性实施例。如图所示,示例性机器人110包括机器人臂112、驱动单元114和控制系统126。
72.在该特定示例中,机器人臂112包括上臂118和两个前臂120,每个前臂承载端部执行器122(配置成接收有效载荷),端部执行器122可经由同轴旋转接头130(称为肘关节)联
接到上臂118。上臂可容纳两个电机(致动器132),每个电机联接到两个前臂120中的一个。
73.驱动单元114包括主轴组件136和z轴机构138。z轴机构138可配置成例如通过滚珠丝杠使用电机mz上下移动主轴组件136。主轴组件136可包括连接到上臂118并由电机m1致动的驱动轴140。
74.示例性机器人110的驱动单元114的特征还有波纹管124和位于电机m1的定子和转子之间的圆柱形屏障125,以容纳可能存在于操作机器人臂112的空间中的真空环境。波纹管124可配置成适应主轴组件136的上下运动。可替代地,在电机m1的定子和转子之间可以不使用屏障,并且电机m1的定子可以位于真空环境中。
75.控制系统126可以包括主控制器142、以固定方式位于驱动单元114中的一个或多个控制模块144、附接到主轴组件136的一个或多个控制模块146、以及位于机器人臂112中的一个或多个控制模块148。主控制器142和控制模块144、146、148可以通过通信网络连接。美国专利us 10,538,000描述了一种位于臂上的致动器,该臂密封在气密容器中,该专利通过引用整体结合于此。美国专利us10,224,232描述了一种位于臂上的电机,该专利通过引用整体结合于此。美国专利us 10,569,430公开了在机器人驱动器和臂中的热传递以及围绕电机的气密外壳,该专利通过引用整体结合于此。美国专利us 10,424,498公开了一种用于提供冷却剂的服务回路,该专利通过引用整体结合于此。美国专利us 10,541,167公开了传热,该专利通过引用整体结合于此。
76.机器人臂112中的致动器132(电机m2和m3)可以由控制模块148控制,该控制模块148方便地紧邻地位于上臂118内。位于驱动单元114的主轴组件136中的致动器(在该特定示例中为电机m1)可由附接到主轴组件136的控制模块146控制,控制模块146可与主轴组件136一起上下移动。驱动z轴机构138的电机mz可以由例如位于驱动单元114的基座处的静止控制模块144控制。控制模块144、146、148可以例如通过通信网络由主控制器142协调,该主控制器也可以位于例如驱动单元114的基座处。
77.上臂118,包括其内部容腔在内,可位于真空环境中并经受真空环境。与控制模块148相关联的电机m2/m3可以被封闭在真空容器中,该真空容器可以填充有空气、另一种气体混合物或单一气体,例如氮气。可替代地或组合地,m2/m3电机的外壳的内部容腔和控制模块148可以被灌封,以增强热传递并且消除机器人臂112中气体的存在。类似地,m2和m3的定子也可以被封装在充满空气、另一种气体混合物或单一气体的密封外壳中,或者电机m2和m3的外壳的内部容腔可以被灌封,以增强热传递并消除机器人臂112中气体的存在。可替代地,m2和m3的定子以及m2/m3控制模块148可以被封装到一个组合单元中,该组合单元可以被密封(例如,使用焊接、真空密封或任何其他合适的方法)在外壳中。外壳的内部容腔可以再次填充有空气、另一种气体混合物或单一气体,或者它可以被灌封。在类似的替代布置中,电机m2和m3可由单独的控制模块控制,这可允许每个定子和对应的控制模块以上述方式封装到组合单元中。作为另一种选择,电机m2和m3可以整体处于真空环境中。
78.作为另一示例,参照图2b,上臂118的内部容腔111可与真空环境密封隔开,并填充有空气、另一气体混合物或单一气体,例如氮气。如图所示,上臂118的内部容腔111可进一步延伸到驱动轴140中,该驱动轴140可在下端处密封,形成密封腔(图2b中的阴影线),该密封腔可方便地容纳机电部件并允许它们在合适的气体环境(与真空相对)中连接。作为示例,密封腔可以容纳m2/m3控制模块、旋转功率耦合器模块(pcm)的一部分和光学通信模块
(ocm)的一部分。密封腔的内部容腔111还可容纳电机m2和m3的定子,在这种情况下,电机m2和m3的定子和转子之间的圆柱形屏障115可用于将上臂118的内部容腔111与外部真空环境隔开。可替代地,电机m2和m3的定子可以位于真空环境中,并且电馈通件可以用于将它们与位于密封腔内的m2/m3控制模块连接。
79.在图2a和图2b的示例中,控制模块144、146、148中的每一个可以包括例如至少一个相应的处理器(处理器)和至少一个相应的存储器(存储器),所述存储器存储例如软件上的指令程序。在另一个示例性实施例中,控制模块144、146、148中的一个或多个可以包括伺服电机控制器。
80.示例性机器人110的驱动单元114可以以服务回路151为特征,服务回路151可以被配置成将主轴组件136与驱动单元114的固定部分电连接。服务回路151可用于功率传输和信号传输以及用于电接地目的。如果适用,服务回路151也可用于引导液体冷却剂进出主轴组件136。
81.示例性机器人110还可以采用旋转功率耦合器(表示为pcm),例如感应功率耦合器150,其被配置为以无接触的方式将功率从主轴组件136传输到上臂118。在美国专利申请公开us 2016/0229296、us 2018/0105044和us 2018/0105045中描述了示例功率耦合器,在此通过引用将它们整体结合于此。在图4d中示意性地示出了感应功率耦合器150的适当示例配置的简化截面图。感应功率耦合器150(或任何其它pcm)可用于将电功率供应到控制模块148(m2/m3),且直接或间接地供应到机器人臂112中的其它有源设备,例如位置编码器和其它传感器。
82.与感应功率耦合器150相关联的电子器件,例如在感应功率耦合器150的固定侧上的ac电源和在感应功率耦合器150的移动侧上的具有滤波器的整流器,可以是单独模块的形式,例如印刷电路板。可替代地,电子器件可以集成到功率耦合器中,或者电子器件可以集成到其它电子组件中,例如m1控制模块和m2/m3控制模块。
83.示例机器人110还可以以光学通信链路160为特征。在该特定示例中,光学通信链路160可以包括两个光学通信模块(也表示为ocm),一个相对于主轴组件136的壳体静止,另一个与上臂118一起旋转。在图4e中示意性地示出了光学通信链路160的适当示例配置的简化截面图。光学通信链路160的两个部分可以利用机器人110的旋转接头的轴承保持对准,或者可以将附加轴承集成到光学通信链路160中,以保持光学通信链路160的两个模块的高度对准,而不管机器人110的结构在各种静态和动态负载条件下的潜在顺应性。光学通信链路160可以促进主轴组件136和上臂118之间的非接触式数据传输。作为示例,光学通信链路160可以被合并到控制系统的通信网络中,并且可以促进去往和来自控制模块148(m2/m3)的双向数据传输。
84.参考图3a,电机m2和m3以及m2/m3控制模块148可以被散热到上臂118。在这种布置中,由电机m2和m3以及m2/m3控制模块148产生的热量可以传递到上臂118中,传导到驱动轴140,辐射到主轴组件136的颈部135,及传导到主轴组件136的壳体。主轴组件136的壳体可以例如通过强制空气流来冷却。传热路径(热流)在图3a中用箭头表示。
85.可替代地,为了降低主轴组件136的颈部135处的温度并且实现在驱动上臂118的驱动轴140与主轴组件136的颈部135之间的更有效的热传递,主轴组件136和/或主轴组件136的颈部135可以是液体冷却的,如图3b中示意性地示出的。例如,主轴组件136的壳体(壳
体129)可位于驱动单元114的框架(框架127)中,冷却通道137延伸穿过壳体129的壁。作为示例,液体冷却系统可以是开环配置,其中从外部源向机器人110供应诸如水的液体。作为另一个例子,液体冷却系统可以是闭环配置,其中液体例如水在机器人110内部循环。闭环冷却系统可包括泵139,该泵139构造成迫使液体通过冷却系统。具有或不具有风扇143的散热器141可用于从液体吸取热量。或者,可以使用制冷单元145来降低液体的温度。如果冷却系统是闭环配置,则泵139、散热器141、风扇143和制冷单元145中的任一个或全部可以在冷却系统的管线中,例如在机器人110的内部。
86.参见图3c,作为对主轴组件136的液体冷却的替代方案,特别是为了在机器人110的驱动单元114周围的环境温度升高时实现从主轴组件136更有效地去除热量,机器人110的驱动单元114的框架127可以通过将液体冷却剂泵送到框架127中而被液体冷却,如在149中。冷却通道137可以延伸穿过框架127。如图3c所示,主轴组件136和驱动单元114的框架127可以具有交错的特征,例如,在框架127的内壁和主轴组件136的壳体129的外壁之间延伸的翅片147,翅片147配置成增加可用于热传递的有效面积,同时允许主轴组件136相对于机器人110的驱动单元114的框架垂直运动。此外,液体冷却系统例如可以是开环配置,其中液体例如水从外部源供应到机器人110。作为另一个例子,液体冷却系统可以是闭环配置,其中液体例如水在机器人110内部循环。闭环冷却系统可包括泵,该泵配置成迫使液体通过冷却系统。具有或不具有风扇的散热器可用于从液体中吸取热量。或者,可以使用制冷单元来降低液体的温度。
87.参照图4a和4b,在驱动上臂118的驱动轴140与主轴组件136的颈部135之间的热传递可通过在颈部135的外表面131上引入另一圆柱形表面区域来增强,如图4a所示,和/或通过在驱动轴140的内表面133上引入另一圆柱形表面区域来增强,如图4b所示。同样,在图4a和4b中用箭头(热流)表示传热路径。可替代地,可以采用以交替图案连接到主轴组件136的壳体和上臂118的多个交错的圆柱形的和/或平面的特征,以进一步增加可用于从上臂118到主轴组件136的壳体的热传递的有效表面。
88.参考图4c,通过使用一个或多个热管117可以改善通过机器人臂112的热传递。热管是结合了导热性和相变原理以在两个导热界面之间传热的传热设备。热管117可以包括一端具有热界面121而另一端具有冷界面123的密封管状外壳、吸液芯结构和工作流体。热管117的工作原理可以描述如下:在热界面121处,液态工作流体接触导热热界面,并通过从热界面121吸收热量而变成蒸气。然后蒸汽沿着热管117行进到冷界面123,在冷界面123处蒸汽冷凝回液态,释放潜热。该过程导致在热管117的热界面和冷界面之间的高效导热性。
89.热管117可配置成将在上臂118的肘部区域中的电机m2和m3产生的热量传递到上臂118的肩部区域(其中热量可从上臂118移除,例如通过辐射到主轴组件136的颈部135),从而有效地减小两个区域之间的有效热阻,并提高两个区域之间的有效导热性。
90.图4d示出了用于机器人110的感应功率耦合器150的适当示例配置。感应功率耦合器150包括具有初级线圈155的初级芯153和具有次级线圈159的次级芯157,初级芯153和次级芯157围绕旋转轴布置。电源161将交流电(ac)输入到初级线圈155中,并通过次级线圈159输入到整流滤波器163。直流(dc)从整流滤波器163输出。次级芯157、次级线圈159和整流滤波器163可以布置为单一模块。
91.图4e示出了用于机器人110的光学通信链路160的适当示例配置的简化截面图。光
学通信链路160包括围绕旋转轴布置的第一光学通信模块165和第二光学通信模块167。第一光学通信模块165包括第一密封光学元件169,并且第二光学通信模块167包括第二密封光学元件171,第一密封光学元件169和第二密封光学元件171被布置为在真空环境的一部分上彼此面对。第一光纤线缆173延伸到第一光学通信模块165中,第二光纤线缆175从第二光学通信模块167延伸。
92.光学通信链路160可以以可选择的电子器件为特征,以将电信号转换成光信号,反之亦然(参见铜到光纤转换块177和光纤到铜转换块179)。转换电子器件(铜到纤维转换块177和纤维到铜转换块179)可以是独立模块的形式,例如印刷电路板。可替代地,电子器件可集成到第一光学通信模块165和第二光学通信模块167中,或者电子器件可集成到其它电子组件中,例如图2a和2b的实例中所示的m1控制模块和m2/m3控制模块。
93.光学通信链路160可以方便地与旋转功率耦合器组合为集成的旋转耦合组件610。在图4f中示意性地示出了可以包括感应功率耦合器和光学通信链路的示例集成旋转耦合器610的简化截面图。在该特定示例中,集成旋转耦合器610的功率耦合器总成基于图4d的示例(具有类似的初级芯153、初级线圈155、次级芯157和次级线圈159),并且集成旋转耦合器的光链路总成基于图4e的示例(铜到光纤转换块177和光纤到铜转换块179)。
94.如图4f所示,集成旋转耦合器610的特征在于两个部分,即相对于主轴组件136的壳体静止的下部612和与上臂118一起旋转的上部614。集成旋转耦合器610的两个部分可以利用机器人110的旋转接头的轴承来保持对准,或者可以在集成旋转耦合器610中利用附加轴承来保持光学通信链路的高度对准,而不管机器人110的结构在各种静态和动态负载条件下的潜在顺应性。
95.参照图5,可替代地,可以使用射频通信系统190来代替光学通信链路160(例如,在图2a和2b的机器人中)。如图5的示例中示意性示出的,射频通信系统190可以包括第一射频通信模块191(表示为rfm191)和第二射频通信模块193(表示为rfm193),一个固定而另一个与上臂118一起旋转。rfm191、193可以是单独的设备,如图5所示,或者它们可以集成到控制系统的其它部件中。
96.参考图6,作为另一替代方案,通信信号可以通过包括第一功率/通信模块195和第二功率/通信模块197的功率耦合器来路由。在基于感应原理的功率耦合器模块总成的情况下,功率耦合器模块总成可以采用相同的线圈组用于功率和数据传输,或者可以使用附加的线圈组来传输数据。可替代地,用于数据传输的线圈可以封装在单独的设备中。
97.参考图7,可以使用多通道电馈通件174将功率和通信信号从大气环境路由到真空环境。可采用真空兼容的服务回路176来适应上臂118相对于主轴组件136的壳体的相对旋转。例如,真空兼容服务回路176可以以包括功率和通信信号导体的单个盘绕线缆的形式实现。
98.作为另一示例,真空兼容服务回路176可利用柔性印刷电路板。在美国专利us 10,569,430中可以找到真空兼容的服务回路型的基于挠性的总成的其它例子,该总成可以在适应上臂相对于主轴组件136的壳体的相对旋转的同时便于功率输送和信号传输,该专利通过引用整体结合于此。
99.参照图8a,可选地,可以使用真空兼容多通道电旋转耦合器180。电旋转耦合器180可以根据各种物理原理和它们的组合来操作,包括:滑环总成,其可以由一个或多个导电环
组成,每个导电环与一个或多个导电刷接触;滑环总成,其由诸如离子液体的导电流体润湿;以及非接触式电容耦合器。作为示例,滑环总成可以用于dc电源和电接地,并且非接触式电容耦合器可以用于通信信号。
100.图8b中的181以图解形式提供了示例性电容性旋转耦合器的简化截面图,其中围绕旋转轴线布置了圆柱体的环形总成,圆柱体的环形总成包括外圆柱体部分183和内圆柱体部分185。第一外环187设置在外圆柱体部分183的内表面上,并且第一内环189与第一外环187相对地设置在内圆柱体部分185的外表面上。第二外环201和第二内环203类似地定位在第一外环187和第一内环189附近。信号通过内环和外环馈送。
101.另一示例在图8c中以205示出,其中上盘部分207和下盘部分209围绕旋转轴线布置。上盘部分207包括上环211、213,下盘部分209包括下环215、217。信号通过上环和下环馈送。
102.参照图9,上臂118的内部容腔或上臂118的内部容腔的一部分可被密封并填充有空气、另一种气体混合物或诸如氮气的单一气体。在电机m2和m3的定子和转子之间可以存在隔离屏障240。在这种情况下,定子可以是上臂118的密封内部容腔的一部分,而转子可以位于真空环境中的隔离屏障240的另一侧。可替代地,电机m2和m3可以全部位于真空环境中。上面关于图2到8c描述的功率、通信和冷却总成可以在图9的示例性实施例中使用(图7和图8a-8c的功率和通信总成可能需要附加的电馈通件,使得功率和通信信号可以进入上臂118的密封容腔)。
103.参照图10,示意性地示出了通信和冷却总成的示例性实施例。在该示例性实施例中,馈通件250可在外部大气环境和真空环境之间附接到主轴组件136的壳体,另一馈通件252可在上臂118的密封内部容腔和真空环境之间附接到上臂118,且服务回路254可用于连接两个馈通件250、252。馈通件250、252和服务回路254可配置成在主轴组件136和上臂118之间传输功率和通信信号。气体供给件256被供给至馈通件250,以将气体供给至上臂118的内部容腔。从馈通件250接收排出的气体258,以将气体排出上臂118的内部容腔。气体(例如空气、另一种气体混合物或单一气体,如氮气)可用于从在上臂118内的和/或附接到上臂118的部件去除热量。气体的示例性流动由箭头示出(气体流)。
104.参考图11a,可替代地,在图10的示例性实施例中的馈通件250之间的服务回路可以由多介质旋转耦合器260代替。在这个示例性实施例中,旋转耦合器260可以将电信号(例如功率和通信信号)与气体一起例如通过第一通道262(到上臂118)引入并且通过第二通道264(从上臂118)引出。
105.如图11b示意性地示出,作为另一替代方案,可使用真空兼容的服务回路270来将上臂118的密封部分或上臂118中的部件(例如控制模块148)的内部容腔与驱动单元114的内部容腔直接连接。
106.例如,如图11c(a)和11c(b)中示意性地示出,服务回路270可以包括扁平管272和扁平线缆278,扁平管272形成为在管272的每个端部处具有附接和密封特征(例如具有密封件276的凸缘274)的盘绕弹簧形状,扁平线缆278例如带状线缆穿过管272的内部。凸缘274可以在管272的一端连接到上臂118的密封部分或上臂118中的部件,并且在管272的另一端连接到主轴组件136的壳体。
107.可替代地,如图11d(a)和11d(b)所示,可以使用例如具有圆形截面的一排管280来
代替图11c(a)和11c(b)的扁平管272。这排管280可以包括凸缘284和密封件286。每个管280可以提供用于电线、线缆和/或软管的通道,或者它可以用于直接通过流体(气体或液体)。可替代地,如图11d(b)所示,管280可形成为螺旋形状或允许管280充分弯曲的任何其它合适形状。
108.为了限制附接点处的弯曲载荷,示例性服务回路270可在每一端通过一个或多个枢转接头290与波纹管124上的凸缘292或其它表面连接,如图11e中示意性示出的。
109.在图11c(a)、11c(b)、11d(a)和11d(b)的实例中,可包含电线、线缆或软管的管272、280可填充有泡沫、类似的弹性材料或任何其它合适的材料,以防止电线、线缆或软管摩擦管272、280的内壁。
110.在图11f中以300示意性地示出了真空兼容服务回路的另一示例。服务回路300可以包括一系列波纹管302、连接到波纹管302的枢转支撑件304、以及附接到基本上刚性的半圆形支撑件308的一个或多个线缆306和/或一个或多个软管。服务回路300可以进一步包括附接和密封特征,例如具有密封件311的凸缘,其可以在服务回路300的一端上连接到上臂118的密封部分或上臂118中的部件,并且在服务回路300的另一端上连接到主轴组件136的壳体。
111.为了平衡在服务回路300的内部与外部真空环境之间的压力差的影响(其可引起压力相关的力或转矩),可采用被配置成在相反方向上作用的两个真空兼容服务回路300。
112.参照图12,示意性地示出了另一示例性实施例,其中在上臂118(或其延伸部或连接到上臂118的轴)和主轴组件136的壳体之间可使用动态密封件320,例如铁磁流体密封件、唇形密封件或任何其它合适的密封件。如图所示,上臂118的内部容腔(或上臂118的内部容腔的一部分)可连接到驱动单元114的内部容腔。该通道可用于将功率和通信传送到上臂118,将气体馈送到上臂118中,以及将废气从上臂118排出。可以利用服务回路322(方便地位于真空环境的外部)来适应上臂118和主轴组件136的壳体之间的相对旋转。类似于图11a至11f的示例,图12的示例实施例中的气体可用于冷却上臂118内的和/或附接到上臂118的部件。图12中的箭头指示示例气流。
113.可替代地,图12的示例性实施例中的服务回路322可以由多介质旋转耦合器330代替,如图13的示例中示意性示出的。同样,示例气流由箭头指示。
114.在以上示例性实施例中,上臂轴118的轴承和电机m1的转子(并且在一些实施例中还有电机m1的定子)可以暴露于真空环境。这可以通过在上臂轴的顶部轴承上方移动动态密封件320来解决,如图14和15a所示。在这些例子中,上臂轴承和电机m1可以在大气环境中。
115.图14的示例性实施例在上臂118和主轴组件136的颈部135(其可以是主轴组件136的壳体的一部分)之间采用动态密封件320,例如铁磁流体密封件、唇形密封件或任何其它合适的密封件。服务回路(例如,176、254、270、300、322)可用于允许上臂118和主轴组件136的壳体的相对旋转。可替代地,如图15a的示例中示意性地描绘的,服务回路(例如,176、254、270、300、322)可以由多介质旋转耦合器(例如,260、330)代替。
116.可替代地,可以使用旋转耦合器和服务回路的组合。例如,旋转耦合器(例如260、330)可用于供应气体,而服务回路(例如176、254、270、300、322)可用于功率信号和通信信号。
117.作为另一种选择,可以利用基本上固定的气体供应管332将气体输送到上臂118。气体供应管332可以相对于主轴组件136的壳体静止,如图15b的示例中示意性示出的(其中气体供应管332形成服务回路151的一部分),或者气体供应管332可以相对于驱动单元114的基部静止,如图15c的示例中示意性示出的。尽管图15b和15c的示例示出了位于上臂轴的顶部轴承上方的动态密封件320,但是动态密封件320可以位于任何合适的位置,例如图12和13的示例中的位置。
118.图10至15d的示例图建议使用机器人110外部的气体供应(例如,气体供应管332)。可替代地,机器人110可以以内部闭环气体循环系统为特征,或可以利用开环空气冷却总成,其中,来自外部大气环境的空气被迫通过机器人110并被排回到外部环境。例如,电风扇可用于此目的。
119.图15d中提供了包含上述选项的概括图。在外部气体供应的情况下,气体输入336可以表示外部气体供应。在内部闭环气体循环系统的情况下,气体输入336可以重新使用通过机器人110循环的气体。并且在开环空气冷却总成的情况下,气体输入336可以从外部环境获取空气。
120.可替代地,可采用上臂118(或与上臂118相关联的部件)的液体冷却。在这种情况下,液体可以被引导到上臂118,并且可以经由与图12至图15d的示例中可以用于气体循环的基本上相同的布置从上臂118返回。作为示例,液体冷却系统可以是开环配置,其中从外部源向机器人110供应诸如水的液体。作为另一个例子,液体冷却系统可以是闭环配置,其中液体例如水在机器人110内部循环。闭环冷却系统可包括泵,该泵配置成迫使液体通过冷却系统。具有或不具有风扇的散热器可用于从液体中吸取热量。可替代地,可以使用制冷单元来降低液体的温度。
121.如图12、14和15b至15d所示的示例性实施例示出了一种两级服务回路布置,其中服务回路151可以用于促进主轴组件136与驱动单元114的静止底座之间的平移运动,并且(第二)服务回路(例如,176、254、270、300、322)可以用于促进上臂118与主轴组件136之间的旋转运动。可替代地,可以使用被配置成促进上臂118与驱动单元114的静止基座之间的平移和旋转运动的单个服务回路。例如,服务回路可以是一个或多个盘绕线缆、一个或多个盘绕软管或盘绕线缆和软管的组合(例如,在一个或多个束中)的形式。
122.在可利用例如多连杆串联机构的更复杂的机器人臂配置中,从机器人臂112中的致动器(电机)到驱动单元114的热路径可包括附加的移动关节。本文所述的热管理方案可扩展到这种机器人臂配置,如图15e中示意性所示。
123.图15e示出了具有三连杆机器人臂212的机器人210的简化截面图的实施例。与前面的示例性机器人一样,机器人210可以包括具有处理器、存储器和软件的合适的控制器。机器人210包括波纹管224、主轴组件236(具有颈部235)和z轴机构238,类似于其它示例性实施例。冷却剂输入和输出可以通过服务回路251引导。如图所示,机器人臂212可以包括三个连杆,这三个连杆可以串联布置并且经由旋转接头彼此联接。以下术语用于描述图15e的机器人臂:示例性机器人臂212的第一连杆称为连杆1或上臂218,第二连杆称为连杆2或上前臂220,第三连杆称为连杆3或下前臂221。主轴组件236和上臂218之间的旋转接头称为肩关节340,上臂218和上前臂220之间的旋转接头称为肘关节342,上前臂220和下前臂221之间的旋转接头称为腕关节344。在2020年5月29日提交的美国临时专利申请us 63/031,883
中示出了一个例子,该专利通过引用整体结合于此。
124.如图15e所示,上臂218可由电机m1致动,电机m1可容纳在驱动单元214的主轴组件236中。上前臂220可由电机m2致动,电机m2可在机器人臂212的肘关节342处容纳在上臂218中。下前臂221可由电机m3致动,电机m3可在机器人臂212的腕关节344处容纳在上前臂220中。电机m1、m2和m3可方便地分别称为主轴电机、肘电机和腕电机。下前臂221可配置成承载有效载荷。例如,它可以包括适于拾取、运送和放置半导体晶片的末端执行器222。
125.机器人臂212的一个或多个旋转接头可以由一个或多个热耦合总成来补充,该热耦合总成被配置成用于在由对应的旋转接头连接的连杆之间传递热量。在图15e的特定示例中,肩关节340由肩旋转热耦合总成231补充,并且肘关节342由肘旋转热耦合总成233补充。
126.如图15f(a)所示,可在旋转接头处例如在图15e的示例性机器人臂212的肘关节342处采用的示例性肘旋转热耦合总成233可包括两个部分。第一部分346a的特征在于一个或多个基本上圆柱形的表面348a,其与相应的旋转接头(肘关节342)同轴对准,并且布置成使得基本上圆柱形的表面348a面向在肘旋转热耦合总成233的第二部分346b上的相对的基本上圆柱形的表面348b。相对的圆柱形表面可被配置成通过穿过在肘旋转热耦合总成233的相对的大致圆柱形表面348a、348b之间的间隙的辐射来传递热量。如果在真空环境中存在残余气体,则辐射机构可以通过在肘旋转热耦合总成233的相对的基本上圆柱形的表面348a、348b之间的通过环境的对流/传导来补充。肩关节和腕关节可以类似地配置。
127.为了增加有效面积并使由示例肘旋转热耦合总成233占据的体积最小化,可在肘旋转热耦合总成233的两个部分中的每一个上设置基本圆柱形特征的阵列,并且这两个阵列可以交错方式布置(例如,作为从部分346a、346b中的每一个延伸的交错翅片)。
128.可替代地,如图15f(b)的示例中所示,肘旋转热耦合总成233的这两个部分可以提供相反的盘状特征,这些特征被配置成用于穿过它们之间的间隙进行非接触式热传递。作为另一替代方案,可以利用旋转热耦合器的有效特征的任何其他合适形状,包括但不限于圆锥形和球形,以及它们的组合。
129.肘旋转热耦合总成233的有效表面可以被处理以提高它们的热辐射率。例如,肘旋转热耦合总成233的两个部分可以由铝制成,并且有效表面可以被阳极化。
130.通过旋转热耦合总成233的热传递可通过在旋转热耦合总成233的两个部分之间的间隙中引入热传递介质349而增加,如图15f(c)的实例中所示。传热介质349可以是与旋转热耦合装置233的两个部分的有效表面接触的流体,并且完全或部分地填充它们之间(例如,翅片之间)的体积,以允许通过传导、对流或它们的组合的方式通过流体进行热传递。
131.合适的传热介质349的实例是具有适当蒸气压的离子液体,允许其在不需要密封的情况下起作用。传热介质349的另一个例子是具有悬浮颗粒的液体溶液,例如铁磁流体或磁流体,其中可以选择颗粒以提高蒸气压和/或热导率。
132.旋转热耦合总成233可以包括将传热介质349与周围真空环境隔离的密封件。密封件可允许使用蒸气压高于真空环境的压力的传热介质349和/或通过相变的传热介质349。
133.为了使任何示例性旋转热耦合总成便于在机器人臂(例如,机器人臂212)的两个连杆之间的热传递,示例性旋转热耦合总成的一部分可附接到连杆(例如,图15e中的上臂218),而示例性旋转热耦合总成的另一部分可附接到相邻连杆(例如,图15e中的上前臂
220),其布置成与连接两个连杆的旋转接头(例如,图15e中的肘旋转热耦合总成233)基本同轴。可选地,旋转热耦合的特征可以直接结合到机器人臂的连杆中。
134.如图15e所示,肩关节340处的肩旋转热耦合总成231遵循与本文所述基本相同的配置。在肩关节340处的肩旋转热耦合总成231可以被配置成将热量从机器人臂212的上臂218传递到驱动单元214的主轴组件236的颈部和壳体,该驱动单元进而可以例如通过液体或其他冷却剂来冷却,如图15e的示例中所示。
135.除了从机器人臂212中的电机去除热量之外,关于图15e的机器人210描述的热管理方案可以方便地扩展并用于管理由机器人臂212从其它源(例如由机器人臂212承载的有效载荷和机器人臂212的周围环境)接收的热量。这可以防止由于机器人臂212的部件的温度的过度升高而引起的各种挑战,包括热膨胀问题,轴承寿命的减少,过早的润滑剂损坏,以及对有源部件(例如电机控制模块、传感器以及可以集成到机器人臂212中的其他电子器件)的热损坏。
136.为了管理可从热有效载荷或从有效载荷被拾取或放置到的环境发出的热的流动,可引入热扼流器350和另一旋转热耦合器,如图15g所示。
137.如图15g中示意性地示出,连杆3或下前臂221可包括邻近由端部执行器222承载的有效载荷的第一部分221a、邻近腕关节344的第二部分221b、以及在第一部分221a和第二部分221b之间的热扼流器350。热扼流器350可被配置用以限制从第一部分221a到第二部分221b的热传递。通过热扼流器350传递的热量可通过其热阻来控制,该热阻可与其它设计参数一起选择,以实现第一部分221a的温度与第二部分221b的温度之间的所需平衡。热扼流器350可例如以具有低热导率的材料(例如陶瓷)的区段的形式实施。
138.此外,如图15g所示,可以包括旋转热耦合器(例如231、233)以补充机器人臂212的腕关节344。旋转热耦合器231、233可配置成将热量从第二部分221b传递到连杆2(上前臂220),从而降低连杆3的第二部分221b的温度。旋转热耦合器231、233的特性可连同热扼流器350的热阻和其它设计参数一起选择,以实现连杆3的第二部分221b的温度与上前臂220(连杆2)的温度之间的所需平衡。
139.图15g的示例性机器人210的简化热模型在图15h的流程图或框图中的360处示出。在图15h中使用以下命名法:
140.p01从周围环境传递到连杆1的热量(w)
141.p02从周围环境传递到连杆2的热量(w)
142.p03从有效载荷和周围环境传递到连杆3的热量(w)
143.p1s从连杆1传递到主轴壳体的热量(w)
144.p21从连杆2传递到连杆1的热量(w)
145.p32从连杆3传递到连杆2的热量(w)
146.pme从肘电机传递到连杆1的热量(w)
147.pms从主轴电机传递到主轴壳体的热量(w)
148.pmw从腕电机传递到至连杆2的热量(w)
149.psc从主轴壳体传递到冷却介质的热量(w)
150.t01连杆1周围的温度(℃)
151.t02连杆2周围的温度(℃)
152.t1连杆1(上臂)的温度(℃)
153.t2连杆2(前臂)的温度(℃)
154.t31连杆3的第一部分(在有效载荷和热扼流器350之间)的温度(℃)
155.t32连杆3的第二部分(在热扼流器350与腕关节344之间)的温度(℃)
156.tc主轴壳体处的冷却介质的入口温度(℃)
157.tme肘电机的温度(℃)
158.tms主轴电机的温度(℃)
159.tmw腕电机的温度(℃)
160.ts主轴壳体的温度(℃)
161.如图15h所示,机器人210的主要部件,包括主轴壳体(或主轴组件236的壳体)、连杆1(上臂218)、连杆2(上前臂220)、连杆3的第一部分221a(在有效载荷和热扼流器350之间)、以及连杆3的第二部分221b(在热扼流器350和腕关节344之间),由简化热模型360中的离散集总热质量表示。
162.考虑到示例性机器人210可以处理热的有效载荷并在高温环境中运行,假设热量可以从有效载荷传递到限定连杆3的下前臂221,并且从环境中可以拾取或放置有效载荷(这由图15h中的热源块表示)。如图15h所示,还假设热量可以从其周围环境传递到连杆1和连杆2(上臂218和上前臂220)。如果真空环境中存在残余气体,则传热机构可包括来自周围环境的辐射以及对流/传导。与图15g的示例一致,图15h的框图反映了可以通过冷却主轴组件236的壳体来从机器人210移除热量。
163.图15h的热模型360可以转换为11个热传递方程和4个能量守恒方程,其可以用于分析机器人热管理方案。例如,给定热源和环境条件,对于给定的机器人设计,可以获得机器人臂212部件的温度,包括ts、t1、t2、t31、t32、tms、tme和tmw,以及p01、p02、p03、p32、p21、p1s和psc。
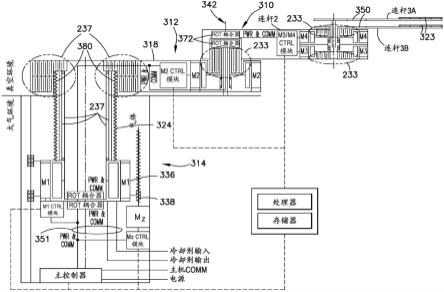
164.在图15i中示意性地示出了将上述热模型360的热管理方案扩展到具有机器人臂312的示例性机器人310,该机器人臂312具有双轴腕关节366。机器人臂312具有上连杆318(连杆1)、连杆2、3a和3b以及末端执行器323和热扼流器350,类似于先前的示例性实施例。机器人臂312从具有波纹管324、主轴组件336和z轴驱动机构338的驱动单元314延伸。功率、通信和冷却剂管线可穿过服务回路351。
165.图15i还示出了前述的功率和通信总成如何可以扩展到更复杂的机器人臂配置,其中通过机器人臂312的电路径可以包括附加的移动关节。与前面描述的功率和通信总成一致,在肩关节340处的第一电旋转耦合器370和在肘关节342处的第二电旋转耦合器372可以表示例如服务回路(例如,类似于服务回路151)、电滑环、电感耦合器、电容耦合器、光学通信链路、射频通信系统、以及这些和其它合适总成的任何组合。例如,电滑环或电感耦合器可用于功率传输,而电容耦合器或光学通信链路可用于通信信号。
166.作为示例,图4d的电感功率耦合器150的概念可以提供具有无限旋转范围的非接触解决方案,该概念可以方便地扩展到图15i的示例性机器人臂的旋转耦合器370、372,如图15j(a)至15j(c)中示意性地示出。在图15j(a)中示出了合适的感应功率耦合器总成的第一示例配置,在图15j(b)中示出了合适的感应功率耦合器总成的第二示例配置,并且在图15j(c)中示出了合适的感应功率耦合器总成的第三示例配置。图15j(a)示出了一种示例配
置,其中肩关节功率耦合器可以以单个次级绕组为特征,该单个次级绕组可以馈送整流器电子器件以及肘关节功率耦合器的初级绕组。与每个感应功率耦合器相关联的电子器件,例如在肩部功率耦合器的静止侧上的ac电源和在肩部功率耦合器的移动侧上的具有滤波器的整流器,可以是单独模块的形式,例如印刷电路板。可替代地,如图15j(a)所示,电子器件可以集成到感应功率耦合器中,或者如图15j(b)所示,电子器件可以集成到其它电子组件中,例如相邻的控制模块。图15j(c)示出了另一示例性布置,其中肩关节功率耦合器可以以两个单独的次级绕组为特征,一个用于馈送整流器电子器件,另一个用于为肘关节功率耦合器的初级绕组供电。在所有三个示例中,每个感应功率耦合器可以是集成的旋转耦合器的一部分,该集成的旋转耦合器可以组合感应功率耦合和光通信,如先前关于图4f所描述的。
167.图15k(a)示出了适用于具有分布式致动器的上述示例性机器人的热管理、功率分配和通信方案的另一示例。在图15k(a)的具体示例中,在机器人臂312的肩部处的连杆1的内部体积可以用于附加的热耦合总成237。如图15k(a)所示,在机器人臂312的肩部处的连杆1的内部体积也可以是凹入的,如380所示,或者用于容纳驱动单元314的上部和/或波纹管124的一部分,从而减小机器人310的总高度。这是可能的,因为与具有集中致动器的传统机器人(见图1a和1b)不同,根据图15k(a)的具有分布式致动器132的示例性机器人310不使用肩滑轮。如图15k(b)所示,机器人310可包括具有多于两个末端执行器323的机器人臂312,例如,如图所示具有三个或四个末端执行器323,每个末端执行器323由电机或电机组驱动。与其他示例性实施例一样,电机或电机组可以使用具有一个或多个处理器和存储器的控制器来控制。
168.示例性的热管理、功率分配和通信方案可以被视为在本文档其他地方详细描述的选定元件的组合和扩展,特别是根据图2b的连杆的密封的内部体积,根据图3b的开环液体冷却的主轴和颈部组件,根据图15f(a)的在所有接头处的旋转热耦合器,根据图4f的在肩部和肘关节处的集成旋转耦合器,根据图15j(b)的通过机器人臂的功率分配,以及与在此描述的控制系统架构一致的控制系统架构(例如,并入具有处理器、存储器和软件的控制器)。
169.关于磁场约束,通过机器人臂分布的致动器(例如电机)可利用磁场进行其操作。然而,一些应用可能对磁场效应敏感,例如由于干扰可能在机器人臂附近发生的过程的风险。在这种情况下,可能有利的是,最小化来自通过机器人臂分布的致动器的潜在磁场泄漏。例如,可以使用磁屏蔽件,如图15l(a)和15l(b)所示。
170.在图15l(a)中,在660处示出了在没有磁屏蔽件的常规布置中的示例性永磁无刷直流电机的截面。转子664相对于定子667旋转。转子664包括轭670和磁体671,定子667包括芯670、绕组672和齿674。图15l(b)示出了具有根据本发明的示例性磁屏蔽总成682的永磁无刷直流电机680的一部分。
171.如图15l(b)所示,电机680的转子684相对于定子687旋转,并且可以包括一个或多个磁屏蔽件682,磁屏蔽件682被配置为包含来自电机680的转子684的磁体686的磁场。在该特定示例中,磁屏蔽件682可以包括两个环形结构,其可以由软磁性材料制成并且可以位于转子684的上方和下方,径向延伸到或超过由电机680的转子684的磁体686的外表面限定的假想圆柱形表面。同样,定子689包括铁心690、绕组691和齿692。
172.在图15l(b)的示例性实施例中,所示的磁屏蔽件682悬于电机680的转子684的磁体686之上,在磁屏蔽件682和电机680的转子684的磁体686之间具有间隙。可替换地,电机680的转子684的磁屏蔽件682和磁体686可以在它们之间基本上没有间隙地接触。磁屏蔽件682可以设计为电机680的转子684的轭685的整体部分,或者设计为附接到电机680的转子684的分离部分。
173.现在转到控制系统架构,在一个示例性实施例中,例如如图15a中示意性示出的,机器人臂112中的致动器132可以由控制模块148控制,该控制模块148方便地位于机器人臂112中的致动器132附近。位于机器人驱动单元114的主轴组件136中的电机m1可以由附接到主轴组件136的控制模块146控制。z电机mz可以由固定在机器人驱动单元214中的控制模块144控制。控制模块144、146、148可以例如通过通信网络由也可以位于机器人驱动单元114中的主控制器142协调。主控制器142可以包括例如至少一个相应的处理器(处理器)和至少一个相应的存储指令程序的存储器(存储器)。在另一示例实施例中,主控制器142可以包括伺服电机控制器。主控制器142和z电机控制模块144可以是单独的设备,或者它们可以组合成单个集成设备。可替代地,如图16所示,主控制器142可以位于机器人驱动单元114的外部。
174.在另一示例性实施例中,编码器信号和电机线可以被带到位于机器人驱动单元114内部或机器人驱动单元114外部的集中式控制器390,分别如图17和18a中示意性示出的。可替代地,可以使用图15a至18a的配置的任何组合。此外,尽管在图15a至18a中相对于一个示例性功率、通信和冷却总成描述了上述示例性控制系统架构,但是它们可应用于先前描述的其它功率、通信和冷却总成。
175.如在图18b的示例性实施例中所示出的,附加的有源部件400可以被结合在具有机器人臂512(以及波纹管524、驱动单元514,主轴组件536、z轴机构538以及服务回路551,类似于先前的示例性实施例)的机器人500中。在图18b的机器人500中,有源部件400被理解为可以利用功率(电的或其他的)和/或通信信号(电的或其他的)的任何设备。示例性的有源部件可以包括致动器、夹具、加热器、传感器(接近度、位置、温度、压力)和照相机。
176.作为示例,有源部件400可包括可用于检测在一个或多个末端执行器522上的有效负载的存在和/或确定在末端执行器522上的有效负载的位置的传感器。作为另一示例,有源部件400可包括传感器和照相机,它们可单独地和/或结合地用于确定末端执行器522相对于在周围环境中的特征的位置。来自这种有源部件400的信息可用于教导(自动地或在手动辅助下)工作站的位置和/或提高有效载荷放置的准确性。
177.考虑图18b的特定示例,位于连杆2 406中的控制模块404可方便地用于与有源部件400(例如与机器人一起使用的材料处理部件)交互,有源部件400与下臂或连杆3a 410和下臂或连杆3b 412相关联,每个部件具有配置成接受有效载荷的末端执行器522。如图18b所示,在下臂或连杆3a 410与连杆2 406之间的旋转接头处的旋转耦合器470可用于促进例如经由电连接或光信号在与下臂或连杆3a 410相关联的有源部件400与连杆2 406中的控制模块404之间的相互作用。类似地,在下臂或连杆3b 412与连杆2 406之间的旋转接头处的旋转耦合器416可用于促进例如经由电连接或光信号在与下臂或连杆3b 412相关联的有源部件400与连杆2 406中的控制模块404之间的相互作用。在这种布置中,与下臂或连杆3a 410和下臂或连杆3b 412相关联的有源部件400可以经由相同的通信信道(例如通信网络)
被方便地控制或以其他方式与之交互,该通信信道可以用于与连杆2 406中的控制模块404通信,从而显著地降低了通过机器人臂512的布线的复杂性。如同先前描述的示例性实施例一样,这些电机(或其任何部分)可以被密封在这些连杆内,并且可以通过密封结构来实现热、功率和通信。
178.作为示例,与下臂或连杆3a 410和下臂或连杆3b 412相关联的有源部件400可以包括夹具,例如静电卡盘,或适用于晶片处理或其中可以使用在此描述的示例机器人的其他处理的任何其他材料处理器具或设备,并且连杆2 406中的控制模块404可以包括操作夹具所必需的电子器件。在该布置中,可以通过相同的通信信道(例如通信网络)方便地控制抓取器,该通信信道可以用于与连杆2 406中的控制模块通信。
179.可替代地,与下臂或连杆3a 410和下臂或连杆3b 412相关联的有源部件400可以使用单独的电子器件来控制或以其他方式与之交互,该电子器件可以直接连接到通信网络或通过另一信道与连杆2 406中的控制模块交互。
180.关于热膨胀补偿,机器人500可以包括被配置成测量其结构部件(例如机器人臂512的连杆)的温度的温度传感器501。作为示例,温度传感器501可以以附接到机器人臂512的连杆的单独设备的形式来实现,或者它们可以集成到电子器件中,诸如热连接到机器人臂512的连杆的控制模块(例如,连杆2 406中的控制模块404和连杆1 411中的控制模块409)。来自温度传感器501的信息可由控制系统(例如,具有处理器和存储器的控制器502,其可耦合到主控制器142,与主控制器142集成或与主控制器142通信)使用,以补偿机器人500的结构部件的温度膨胀对机器人500的末端执行器522的位置的影响。
181.作为示例,控制系统可使用以下步骤来补偿机器人500的结构部件的温度膨胀对机器人500的末端执行器522的位置的影响,使得机器人500可准确地拾取或放置有效载荷,而不管机器人500的结构部件的温度如何(方法a):
182.a1.测量机器人500的结构部件的温度,其尺寸影响机器人500的末端执行器522的实际位置。例如,结构部件可以是机器人臂512的连杆。
183.a2.利用测量的温度,估计机器人500的运动学模型的参数。机器人500的运动学模型可以是用于将机器人500的关节坐标转换为机器人500的末端执行器坐标(正运动学)且反之亦然(逆运动学)的数学表达式(方程)或一组表达式(方程)。机器人500的运动学模型的参数可以是例如机器人臂512的连杆的尺寸,例如机器人臂512的连杆的关节到关节的长度。机器人500的运动学模型的估计参数可以被称为运动学模型的调整参数。
184.a3.使用运动学模型的经调整参数,使用逆运动学来计算对应于机器人500的目标末端执行器坐标(机器人500的末端执行器522在所需移动端点处的坐标)的机器人500的关节坐标。计算出的机器人500的关节坐标可以被称为机器人500的调整后的目标关节坐标。
185.a4.基于机器人500的经调整的目标关节坐标,并利用运动学模型的标称参数,使用直接运动学来计算机器人500的对应末端执行器坐标。计算出的机器人500的末端执行器坐标可以被称为机器人500的调整后的目标末端执行器坐标。
186.a5.在末端执行器坐标空间中生成从机器人500的当前命令的末端执行器坐标到机器人500的经调整的目标末端执行器坐标的轨迹。结果可以是在机器人500的当前命令的末端执行器坐标与机器人500的调整后的目标末端执行器坐标之间的在末端执行器坐标空间中的一组命令的中间点。
187.a6.对于在坐标末端执行器空间中的每个命令的中间点,利用运动学模型的标称参数,使用逆运动学来计算机器人500的相应关节坐标。所得到的机器人500的关节坐标可以被称为机器人500的命令的关节坐标。
188.a7.利用机器人500的命令的关节坐标来控制机器人500的电机,使得机器人500的实际关节坐标紧随机器人500的命令的关节坐标。
189.在上述步骤中,关节坐标可以是例如驱动机器人臂512的连杆的致动器(电机)的角位置,并且末端执行器坐标可以是在机器人末端执行器上的参考点的笛卡尔坐标。作为另一示例,末端执行器坐标可以是在机器人末端执行器上的参考点和机器人末端执行器的取向的笛卡尔坐标。
190.上述步骤a6可以在机器人500的移动开始之前,在机器人500的移动执行期间周期性地执行,例如,基本上与步骤a7并行地执行,或者可以使用这两种方案的组合。例如,步骤a5可以在机器人500移动之前在末端执行器坐标空间中生成一组粗略的命令中间点,并且可以在移动执行期间计算更精细的命令中间点。在这种情况下,步骤a6可以在执行机器人移动期间应用于每个更精细的中间命令点。
191.上述方法的目的是在运动的端点处校正机器人500的末端执行器的位置,这可以允许机器人500精确地拾取或放置有效载荷,而不管其结构部件的温度如何。然而,机器人500的末端执行器522在端点之间的实际运动路径可能不精确地遵循期望的路径,因为控制系统用于计算的命令关节坐标的运动学参数的标称值可能不反映机器人500的结构部件的实际尺寸。例如,如果机器人500的末端执行器522到移动终点的期望路径是直线,则末端执行器522的实际路径可能偏离移动起点和终点之间的期望直线路径。
192.可替代地,如果期望端点之间的精确运动,则控制系统可以使用以下步骤来补偿机器人500的结构部件的温度膨胀对运动期间机器人500的末端执行器522的位置的影响(方法b):
193.b1.测量机器人500的结构部件的温度,其尺寸影响机器人500的末端执行器522的实际位置。
194.b2.利用测量的温度,估计机器人500的运动学模型的参数。机器人500的运动学模型的估计参数可以被称为运动学模型的调整参数。
195.b3.基于机器人500的当前命令的关节坐标,并利用运动模型的调整参数,使用直接运动学来计算机器人500的相应末端执行器坐标。计算出的机器人500的末端执行器坐标可以被称为机器人500的调整后的起始末端执行器坐标。
196.b4.在末端执行器坐标空间中生成从机器人的经调整的起始末端执行器坐标到机器人的目标末端执行器坐标(机器人的末端执行器在期望的移动终点处的坐标)的轨迹。结果可以是在机器人的经调节的起始末端执行器坐标与机器人的目标末端执行器坐标之间在末端执行器坐标空间中的一组命令中间点。
197.b5.对于在末端执行器坐标空间中的每个命令中间点,利用运动模型的调整参数,使用逆运动学来计算机器人500的相应关节坐标。所得到的机器人500的关节坐标可以被称为机器人500的命令的关节坐标。
198.b6.利用机器人500的命令的关节坐标来控制机器人500的电机,使得机器人500的实际关节坐标紧随机器人500的命令的关节坐标。
199.以上步骤b5可以在机器人500的移动开始之前,在机器人500的移动执行期间周期性地执行,例如,基本上与步骤b6并行地执行,或者可以使用这两种方案的组合。例如,步骤b4可以在机器人500移动之前在末端执行器坐标空间中生成一组粗略的命令中间点,并且可以在移动执行期间计算更精细的命令中间点。在这种情况下,在执行机器人移动期间,可以将步骤b5应用于每个更精细的中间命令点。
200.在上述方法中,在执行上述步骤之前,可以调节目标末端执行器坐标(端点)以反映操作机器人500的系统的热膨胀。例如,目标末端执行器坐标可被调节,以反映由于传送室和处理模块的热膨胀而引起的在传送室中的机器人驱动单元514和半导体晶片处理系统的处理模块中的站之间的距离变化。
201.上述热膨胀补偿方法可以例如在图2a或图2b的示例性机器人上示出。该示例性机器人的运动学模型可从图18c的曲线图导出,图18c示出了机器人的上臂(连杆1)和前臂(连杆2)。图中使用了以下术语:
202.l1连杆1(上臂)的从肩关节到肘关节的长度(m)
203.l2连杆2的(前臂)从肘关节到机器人末端执行器上的参考点的长度(m)
204.x机器人末端执行器上的参考点x-坐标(m)
205.y机器人末端执行器上的参考点的y-坐标(m)
206.θ1连杆1(上臂)相对于固定坐标框架的角度(
°
)
207.θ2连杆2(前臂)相对于连杆1(上臂)的角度(
°
)
208.考虑图18c的图,图2a或图2b的示例性机器人的直接运动学可以通过以下方程来描述:
209.x=l1cosθ1+l2cos(θ1+θ2)
ꢀꢀꢀ
(1)
210.y=l1sinθ1+l2sin(θ1+θ2)
ꢀꢀꢀ
(2)
211.类似地,仍然参考图18c,用于图2a或2b的示例性机器人的逆运动学的方程可以被公式化如下:
212.θ2=acos[(x2+y2-l12-l22)/(2l1l2)]
ꢀꢀꢀ
(3)
[0213]
θ1=atan(y/x)-atan[l2sinθ2/(l1+l2cosθ2)]
ꢀꢀꢀ
(4)
[0214]
根据先前建立的术语,连杆1(上臂)的长度l1和连杆2(前臂)的长度l2被称为示例性机器人的运动学模型的参数。
[0215]
运动模型的上述参数的实际值可以基于它们的标称值和连杆1(上臂)和连杆2(前臂)的测量温度根据以下表达式来估计:
[0216]
l1adj=l1nom cte1(t1act-tnom)
ꢀꢀꢀ
(5)
[0217]
l2adj=l2nom cte2(t2act-tnom)
ꢀꢀꢀ
(6)
[0218]
其中,
[0219]
cte1为连杆1(上臂)的热膨胀系数(1/k)
[0220]
cte2为连杆2(前臂)的热膨胀系数(1/k)
[0221]
l1adj为连杆1(上臂)的调节长度(m)
[0222]
l1nom为在温度tnom(k)下的连杆1(上臂)的标称长度
[0223]
l2adj为调整后的连杆2(前臂)的长度(m)
[0224]
l2nom为在温度tnom(k)下的连杆1(前臂)的标称长度
[0225]
t1act为连杆1(上臂)的测量温度(k)
[0226]
t2act为连杆2(前臂)的测量温度(k)
[0227]
tnom为机器人臂的标称温度(k)
[0228]
利用上述方程,热膨胀补偿方法a可以如下应用于图2a或图2b的示例性机器人:
[0229]
a1.测量连杆1(上臂)的温度t1act和连杆2(前臂)的温度(前臂)t2act。
[0230]
a2.使用方程(5)和(6)计算调整后的连杆1(上臂)的长度l1adj和调整后的连杆2(前臂)的长度l2adj。
[0231]
a3.基于逆运动学方程(3)和(4)计算机器人的经调整的目标关节坐标θ1dstadj和θ2dstadj:
[0232]
θ2dstadj=acos[(xdst2+ydst2-l1adj2-l2adj2)/(2l1adjl2adj)]
[0233]
(7)
[0234]
θ1dstadj=atan(ydst/xdst)-atan[l2adj sinθ2dstadj/(l1adj+l2adj cosθ2dstadj)]
ꢀꢀꢀ
(8)
[0235]
其中,
[0236]
xdstx在机器人末端执行器上的参考点在期望移动端点处的坐标(m)
[0237]
ydsty在机器人末端执行器上的参考点在期望移动端点处的坐标(m)
[0238]
θ1dstadj连杆1(上臂)的在期望的移动端点处的调节角度(
°
)
[0239]
θ2dstadj连杆2(前臂)的在期望的移动端点处的调节角度(
°
)
[0240]
a4.基于所述直接运动方程(1)和(2)确定经调节的目标末端执行器坐标xdstadj和ydsadj:
[0241]
xdstadj=l1nom cosθ1dstadj+l2nom cos(θ1dstadj+θ2dstadj)
ꢀꢀꢀ
(9)
[0242]
ydstadj=l1nom sinθ1dstadj+l2nom sin(θ1dstadj+θ2dstadj)
ꢀꢀꢀ
(10)
[0243]
其中,
[0244]
xdstadj机器人末端执行器上的参考点在移动端点处的经调节的x坐标(m)
[0245]
ydstadj机器人末端执行器上的参考点在移动端点处的经调节的y坐标(m)
[0246]
a5.在末端执行器坐标空间中生成从机器人的当前命令的末端执行器坐标xcmd0和ycmd0到机器人的经调节的目标末端执行器坐标ydstadj和ydstadj的轨迹。结果可以是一组命令的中间点xcdmi和ycmdi,i=1、2、
…
、n,其中,n是轨迹点的数量。
[0247]
a6.对于每个命令的中间点xcmdi和ycmdi,基于逆运动学方程(3)和(4)计算机器人的相应命令的关节坐标θ1cmdi和θ2cmdi:
[0248]
θ2cmdi=acos[(xcmdi2+ycmdi2-l1nom2-l2nom2)/(2l1nom〃l2nom)]
ꢀꢀꢀ
(11)
[0249]
θ1cmdi=atan(ycmdi/xcmdi)-atan[l2nom sinθ2cmdi/(l1nom+l2nom cosθ2cmdi)]
ꢀꢀꢀ
(12)
[0250]
其中,
[0251]
θ1cmdi连杆1(上臂)在轨迹点i处的调节角度(
°
)
[0252]
θ2cmd连杆2(前臂)在轨迹点i处的调节角度(
°
)
[0253]
a7.利用机器人的命令关节坐标θ1cmdi和θ2cmdi来控制机器人的电机,例如电机m1和电机m2,使得机器人的实际关节坐标紧随机器人的命令关节坐标。
[0254]
类似地,利用方程(1)至(6),热膨胀补偿方法b可以如下应用于图2a或图2b的示例
性机器人:
[0255]
b1.测量连杆1(上臂)的温度t1act和连杆2(前臂)的温度(前臂)t2act。
[0256]
b2.使用方程(5)和(6)计算调节后的连杆1(上臂)的长度l1adj和调节后的连杆2(前臂)的长度l2adj。
[0257]
b3.基于当前命令的机器人关节坐标θ1cmd0和θ2cmd0,并利用调节后的运动学模型参数l1adj和l2adj,调整直接运动学方程(1)和(2),以计算调节后的机器人起始末端执行器坐标xcm0和ycmd0:
[0258]
xcmd0=l1adj cosθ1cmd0+l2adjcos(θ1cmd0+θ2cmd0)
ꢀꢀꢀ
(13)
[0259]
ycmd0=l1adj sinθ1cmd0+l2adjsin(θ1cmd0+θ2cmd0)
ꢀꢀꢀ
(14)
[0260]
b4.在末端执行器坐标空间中,生成从调节后的机器人起始末端执行器坐标xcm0和ycmd0到机器人目标末端执行器坐标xdst和ydst的轨迹。结果可以是在末端执行器坐标空间中的一组命令中间点xcmdi和ycmdi,i=1、2、
…
、n,其中,n是轨迹点的数量。
[0261]
b5.对于每个命令的中间点xcmdi和ycmdi,利用逆运动学方程(3)和(4)中的运动学模型的调节后的参数l1adj和l2adj来计算机器人的相应命令的关节坐标θ1cmdi和θ2cmdi:
[0262]
θ2cmdi=acos[(xcmdi2+ycmdi2-l1adj2-l2adj2)/(2l1adjl2adj)]
[0263]
(15)
[0264]
θ1cmdi=atan(ycmdi/xcmdi)-atan[l2adj sinθ2cmdi/(l1adj+l2adj cosθ2cmdi)]
ꢀꢀꢀ
(16)
[0265]
b6.利用机器人的命令关节坐标θ1cmdi和θ2cmdi来控制机器人的电机,例如电机m1和电机m2,使得机器人的实际关节坐标紧随机器人的命令关节坐标。
[0266]
通过图19a至28c(包括图19b、19c和27a)的简化截面图表示关于根据本发明的材料处理真空环境机器人的各种示例性实施例的示例性机器人配置。这些实施例可以方便地包含先前描述的示例功率、通信和冷却总成以及控制系统架构的各种组合。在图19a中,致动器(电机m1)位于驱动单元114中,并且致动器132(电机m2/m3)在上臂118和前臂120之间的肘关节处分布到机器人臂112中。在图19b中,致动器(电机m1)从驱动单元114中移去并在上臂118中位于肩关节处,并且致动器132(电机m2/m3)再次在上臂118和前臂120之间的肘关节处分布到机器人臂112中。图28a至28c示出了具有第一臂112a和第二臂112b的机器人110。
[0267]
如果在机器人臂112中的一些电机和机器人臂112的第一连杆之间存在移动关节,例如在图24至27a的示例性实施例中,前面描述的示例性功率、通信和冷却总成可以方便地延伸到这些接头。在图24至27a中的所有机器人臂112中,至少一个肩关节800位于驱动单元114中的电机和机器人臂112中的移位电机之间。在图19c的示例性实施例中,所有电机m1、m2、m3的定子附接到机器人臂112的第一连杆(上臂118)(与电机m1的定子被示出为直接或间接地连接到主轴组件136的壳体的其他示例不同)。这允许使用单个服务回路,该服务回路可以被配置成促进机器人臂112的上臂118与驱动单元114的静止基座之间的平移和旋转运动。
[0268]
图19b、22和23的示例图示出了由内向外电机的示例实施例,即,在其定子(外转子)的外侧具有转子700的电机m,其可用于更好地利用可用空间。然而,任何合适的电机配
置,包括但不限于具有内部转子的径向电机,具有外部转子的径向电机,轴向电机以及它们的组合,可用于任何实施例中。图20示出了一种配置,其中,机器人臂112在驱动单元114中具有两个电机m1/m2并且在肘关节处具有两个电机m3/m4。图21示出了一种配置,其中,机器人臂112在驱动单元114中具有一个电机m1并且在肘关节处具有三个电机m2/m3/m4。
[0269]
与图15e、15g、15i、15k(a)和(b)、18b和20至27d的示例一致的机器人的操作在图29a和29b中示意性地示出,图29a和29b示出处于缩回位置和各种伸出位置的机器人。
[0270]
图27b和27c示出了具有驱动单元914的机器人900的示例性实施例,该驱动单元914具有带四个末端执行器922的机器人臂112。如图27b所示,至少电机m1、m2、m3和m4可以使用具有处理器和存储器的适当控制器来控制,这些处理器和存储器中的一些或全部可以通过通信系统链接。图27b以简化的截面图的形式示出了机器人900的侧视图,并且图27c提供了机器人900的顶视图的图解示图。如图27b和27c所示,四个末端执行器922可以被配置为臂912上的两对相对的末端执行器,其中每一对中的两个相对的末端执行器可以以基本上刚性的方式彼此连接。例如,相对的末端执行器a和c可以以基本上刚性的方式彼此连接,并且相对的末端执行器b和d可以以基本上刚性的方式彼此连接。两对末端执行器,例如对a-c和对b-d,可以被配置成彼此独立地旋转。两对末端执行器可以各自在中点925处联接,中点925在机器人臂912的腕部上形成枢轴点,使得两对末端执行器以剪刀状操作移动。
[0271]
图27b和27c的机器人的操作在图27d的(a)至(h)中示意性地示出。图(a)示出了处于缩回位置的机器人900,其中末端执行器a和b堆叠并准备延伸。图(b)描绘了末端执行器a和b以其堆叠构型延伸的机器人900。图(c)示出了处于缩回位置的机器人900,其中末端执行器c和d叠置并准备延伸。图(d)描绘了末端执行器c和d以其堆叠构型延伸的机器人900。图(e)示出了处于缩回位置的机器人900,其中末端执行器a和b以并排构型散开,准备延伸。图(f)描绘了末端执行器a和b以其并排构型延伸的机器人900。图(f)示出了处于缩回位置的机器人900,其中末端执行器c和d以并排构型散开,准备延伸。图(g)描绘了机器人900,其中末端执行器c和d以其并排构型延伸。
[0272]
作为示例,利用图27c所示的操作,机器人900可以在诸如装载锁的堆叠站和诸如处理模块的并排站之间传送材料。例如,机器人900可以利用末端执行器a和b从一对堆叠站(堆叠装载锁)拾取一对新晶片,使用末端执行器c和d从一对并排站(双处理模块)拾取一对处理过的晶片,立即用末端执行器a和b上的新晶片替换在该对并排站(双处理模块)中的该对处理过的晶片,并将末端执行器c和d上的该对处理过的晶片放置到一对堆叠站(堆叠装载锁)。
[0273]
图28a至28c示意性地描绘了具有示例臂的示例机器人,该示例臂可以包括两个连杆机构,例如左连杆机构和右连杆机构。两个连杆中的每一个可包括第一连杆(也可称为上臂)、第二连杆(前臂)和具有末端执行器(或多个末端执行器,如下所述)的第三连杆(腕组件)。两个连杆机构的上臂可以彼此刚性地连接并附接到机器人的驱动单元的驱动轴上。每个前臂可通过旋转接头联接到相应的上臂,并由诸如电机的致动器相对于相应的上臂致动。每个腕组件可以通过另一个旋转接头联接到相应的前臂,并通过传动总成例如皮带、带子或线缆驱动器被约束,以保持径向取向(或从径向偏移恒定距离和/或恒定角度的取向)。
[0274]
在图28a至28c的示例中,前臂的关节到关节的长度被示为小于上臂的关节到关节的长度,这可允许前臂共享基本相同的垂直空间,从而减小臂的总高度。在这种情况下,传
动总成可以利用皮带、带或具有非圆形滑轮的缆索驱动件。可替代地,前臂的关节到关节的长度可以与上臂的关节到关节的长度相同。在这种情况下,前臂可以垂直地堆叠以彼此隔开,并且传动总成可以利用皮带、带或具有圆形滑轮的缆索驱动件(在腕关节处连接到腕组件的滑轮的有效半径可以是在肘关节处连接到上臂的滑轮的有效半径的两倍)。作为另一种选择,前臂的关节到关节的长度可以大于上臂的关节到关节的长度。
[0275]
图28的示例性机器人的操作在图28d中示意性地示出,其示出了处于缩回位置和各种伸出位置的示例性机器人。
[0276]
虽然大多数上述示例性实施例的特征在于两个独立致动的末端执行器,但可支撑任何数量的末端执行器,包括一个独立致动的末端执行器和三个或更多个独立致动的末端执行器。此外,机器人臂912可以承载多个刚性连接的末端执行器的一个或多个组件。作为示例,这种刚性连接的末端执行器的组件可以包括在单个平面中并排布置的一对末端执行器,或者它可以包括基本上彼此叠置的多个末端执行器。
[0277]
尽管单个z轴机构被示出为上述示例性实施例的一部分,但是可以使用任何数量的z轴机构,包括没有z轴机构。尽管上述示例性实施例被描述为具有由旋转电机经由滚珠丝杠致动的z轴,但是可以使用任何其他合适的布置,例如但不限于连杆机构或线性电机。
[0278]
应当注意,在整个文件中的图中示出的轴承、轴承布置和轴承位置仅用于说明,目的是传达各个部件通常如何相对于彼此被约束。可以使用任何合适的轴承、轴承布置和轴承位置。
[0279]
尽管通信网络被描述为控制系统的各种部件之间的通信机构,但是可以使用主控制器和控制模块之间的任何其它合适的通信机构,例如无线网络或点对点总线。
[0280]
在一个示例中,装置包括驱动器;连接到所述驱动器的可移动臂,所述可移动臂包括在肩部处连接到所述驱动器的第一连杆、在肘部处连接到所述第一连杆的第二连杆、在腕部处连接到所述第二连杆的第三连杆、以及在所述腕部处连接到所述第二连杆的第四连杆;位于该第二连杆中的至少一个第一致动器,该第一致动器被配置成致使该第三连杆围绕该腕部旋转;以及位于所述第二连杆中的至少一个第二致动器,所述至少一个第二致动器被配置成使所述第四连杆围绕所述腕部旋转。通过第二连杆实现热管理、功率分配或通信中的一个或多个。
[0281]
肩部、肘部或腕部中的至少一个可包括热耦合总成。热耦合总成可以是旋转热耦合总成,其包括具有第一基本圆柱形表面的第一部分、具有第二基本圆柱形表面的第二部分,并且定位成使得第二基本圆柱形表面面向第一基本圆柱形表面,第一基本圆柱形表面和第二基本圆柱形表面与肩部、肘部或腕部中的至少一个的枢转点同轴对准,其中热传递跨越第一基本圆柱形表面和第二基本圆柱形表面之间的间隙实现。第一基本圆柱形表面和第二基本圆柱形表面可限定分别从第一部分和第二部分延伸的多个翅片。该装置可以进一步包括在该第一基本圆柱形表面与该第二基本圆柱形表面之间的一种热传递介质。第一连杆可包括配置成容纳驱动器的上部的凹入部分。第一连杆、第二连杆、第三连杆或第四连杆中的一个或多个可具有密封的内部容腔。该驱动器可以包括主轴组件,该主轴组件具有被配置成用于旋转该可移动臂的驱动轴。主轴组件可包括一个或多个冷却通道,所述冷却通道被配置成接收循环冷却介质。该装置还可以包括在驱动器和可移动臂的第一连杆之间的第一功率耦合器,第一功率耦合器包括在驱动器上并相对于驱动器静止的初级线圈和在第
一连杆上并相对于初级线圈可旋转的次级线圈。该装置还可以包括与第一功率耦合器集成的光学通信链路。该装置还可以包括在第一连杆和第二连杆之间的第二功率耦合器,该第二功率耦合器包括在第一连杆上并且相对于第一连杆静止的初级线圈和在第二连杆上并且相对于初级线圈可旋转的次级线圈。第三连杆和第四连杆可以各自包括一对相对的末端执行器,这些末端执行器被配置成围绕腕部旋转。
[0282]
在另一示例中,一种方法包括:提供驱动器;提供连接到所述驱动器的可移动臂,所述可移动臂包括在肩部处连接到所述驱动器的第一连杆、在肘部处连接到所述第一连杆的第二连杆、在腕部处连接到所述第二连杆的第三连杆、以及在所述腕部处连接到所述第二连杆的第四连杆;提供位于该第二连杆中的至少一个第一致动器,该第一致动器被配置成使得该第三连杆围绕腕部旋转;以及提供位于所述第二连杆中的至少一个第二致动器,所述至少一个第二致动器被配置成使得所述第四连杆围绕所述腕部旋转。通过第二连杆实现热管理、功率分配或通信中的一个或多个。
[0283]
该方法还可包括在肩部、肘部或腕部中的至少一个处提供热耦合总成。该方法还可包括使第一连杆凹陷以容纳驱动器的上部。该方法还可以包括冷却驱动器。冷却驱动器可以包括使冷却介质从外部源循环通过驱动器。冷却驱动器可以包括使冷却介质在驱动器或可移动臂中的至少一个内部循环。该方法还可以包括在驱动器和第一连杆之间提供功率耦合器。该方法还可以包括提供与功率耦合器集成的光学通信链路。
[0284]
在另一示例中,一种装置包括:至少一个处理器;以及包括计算机程序代码的至少一个非暂时性存储器,该至少一个存储器和该计算机程序代码被配置成与该至少一个处理器一起使得该装置至少执行:移动连接到驱动器的臂,所述臂包括在肩部处连接到驱动器的第一连杆、在肘部处连接到第一连杆的第二连杆、在腕部处连接到第二连杆的第三连杆、以及在腕部处连接到第二连杆的第四连杆;通过位于第二连杆中的至少一个第一致动器使第三连杆围绕腕部旋转;以及通过位于所述第二连杆中的至少一个第二致动器使所述第四连杆围绕所述腕部旋转。通过第二连杆实现热管理、功率分配或通信中的一个或多个。
[0285]
在另一示例中,装置包括:驱动器;可移动臂,该可移动臂包括:第一连杆,该第一连杆具有第一控制件并且围绕该驱动器可旋转;第二连杆,该第二连杆具有第二控制件并且在第一旋转接头处连接到该第一连杆上;以及至少一个第三连杆,该第三连杆在第二旋转接头处联接到该前臂上;至少一个第一致动器,该第一致动器位于该第一连杆中并且被配置成使得该第二连杆围绕该第一旋转接头旋转;至少一个第二致动器,该第二致动器位于该第二连杆中并且被配置成使得该至少一个第三连杆围绕该第二旋转接头旋转;以及与所述至少一个第三连杆相关联的至少一个有源部件。通过第二旋转接头实现热管理、功率分配或通信中的一个或多个,以使至少一个有源部件与第二连杆的第二控制件相互作用。
[0286]
该装置还可包括位于第一旋转接头或第二旋转接头中的一个或多个处的至少一个热耦合总成。第一连杆可包括凹入部分以容纳驱动器的上部。第一连杆、第二连杆或至少一个第三连杆中的一个或多个可具有密封的内部容腔。该至少一个第一致动器或该至少一个第二致动器可以位于该对应的至少一个第一连杆或该至少一个第二连杆内的真空容器内。真空容器可以充满空气、另一种气体混合物或单一气体。该装置还可以包括在驱动器和可移动臂的第一连杆之间的第一功率耦合器,第一功率耦合器包括在驱动器上并相对于驱动器静止的初级线圈和在第一连杆上并相对于初级线圈可旋转的次级线圈。有源部件可以
包括致动器、夹具、加热器或传感器。有源部件可以包括温度传感器。温度传感器可以联接到具有处理器和至少一个存储器的控制件。温度传感器可以被配置成测量第一连杆、第二连杆或至少一个第三连杆中的一个或多个的温度。所测量的温度可以被配置成补偿该第一连杆、该第二连杆或该至少一个第三连杆中的一个或多个的温度膨胀的影响。该至少一个第三连杆可以包括第一对相对的末端执行器和第二对相对的末端执行器,每对相对的末端执行器以基本上刚性的方式彼此连接。
[0287]
在另一示例中,一种方法包括:提供驱动器;提供可移动臂,该可移动臂包括:第一连杆,该第一连杆具有第一控制件并且被连接到该驱动器上并且可围绕该驱动器旋转;第二连杆,该第二连杆具有第二控制件并且在第一旋转接头处被连接到该第一连杆上;以及至少一个第三连杆,该第三连杆在第二旋转接头处被联接到该前臂上;提供至少一个第一致动器,该第一致动器位于该第一连杆中并且被配置成使得该第二连杆围绕该第一旋转接头旋转;提供至少一个第二致动器,该第二致动器位于该第二连杆中并且被配置成使得该至少一个第三连杆围绕该第二旋转接头旋转;以及提供与所述至少一个第三连杆相关联的至少一个有源部件。通过第二旋转接头实现热管理、功率分配或通信中的一个或多个,以使至少一个有源部件与第二连杆的第二控制件相互作用。
[0288]
有源部件可以包括致动器、夹具、加热器或传感器。有源部件可以包括至少一个温度传感器。该方法可以进一步包括,提供具有处理器和至少一个存储器的控制件,该控制件被配置成接受来自该至少一个温度传感器的至少一个输入。该至少一个输入可以被配置成用于计算该第一连杆、该第二连杆、或该至少一个第三连杆中的一个或多个的温度膨胀。所计算的温度膨胀可以被配置成用于确定该至少一个第三连杆的经调节的末端位置。
[0289]
在另一示例中,装置包括驱动器;连接到所述驱动器的可移动臂,所述可移动臂包括:在肩部可旋转地联接到所述驱动器的上臂,所述上臂具有位于所述上臂内的第一致动器;可旋转地联接到所述上臂的前臂,所述前臂具有位于所述前臂内的第二致动器和第三致动器;在旋转接头处可旋转地联接到所述前臂并被配置成由所述第二致动器移动的第一对末端执行器;以及在所述旋转接头处可旋转地联接到所述前臂并被配置成由所述第三致动器移动的第二对末端执行器。第一对末端执行器被配置为独立于第二对末端执行器移动。至少第二致动器和第三致动器被配置成由控制件控制,其中该控制件被配置成控制对第一对末端执行器和第二对末端执行器的热管理、功率分配或通信中的一个或多个。
[0290]
第一对末端执行器和第二对末端执行器可以基本上在第一对末端执行器和第二对末端执行器的中点处可旋转地联接到旋转接头。第二致动器和第三致动器可以被配置成由具有处理器和至少一个存储器的控制器控制。
[0291]
在另一个示例中,一种方法包括,测量机器人的相应的至少一个结构部件的至少一个温度;使用所测量的至少一个温度来估算该至少一个结构部件的尺寸;基于所述至少一个结构部件的所述估计尺寸,计算与所述机器人的末端执行器的期望目的地相对应的关节坐标;基于所计算的关节坐标组计算所述末端执行器的最终目的地;确定从计算出的所述末端执行器的最终目的地到计算出的所述末端执行器的期望目的地的轨迹;确定在所确定的轨迹上的多个中间点;以及使用在所确定的轨迹上的所确定的多个中间点来控制引起所述末端执行器运动的至少一个电机。
[0292]
使用在所确定的轨迹上的所确定的多个中间点来控制至少一个电机可以包括,沿
着所确定的轨迹并且基于对在所确定的轨迹上的多个中间点处的所估计的尺寸进行的调节来将末端执行器移动到期望的目的地。
[0293]
在另一示例中,一种装置包括至少一个处理器;以及包括计算机程序代码的至少一个非暂时性存储器,该至少一个存储器和该计算机程序代码被配置成与该至少一个处理器一起使得该装置至少执行:测量机器人的相应的至少一个结构部件的至少一个温度;使用所测量的至少一个温度来估算该至少一个结构部件的尺寸;基于所述至少一个结构部件的所述估计尺寸计算与所述机器人的末端执行器的期望目的地相对应的一组关节坐标;基于所计算的关节坐标组计算所述末端执行器的最终目的地;确定从计算出的所述末端执行器的最终目的地到计算出的所述末端执行器的期望目的地的轨迹;确定在所确定的轨迹上的多个中间点;以及使用在所确定的轨迹上的所确定的多个中间点来控制引起所述末端执行器运动的至少一个电机。
[0294]
在另一示例中,一种机器可读的非瞬态程序存储设备,有形地包含可由机器执行的用于执行操作的指令的程序,包括以下操作:测量机器人的相应的至少一个结构部件的至少一个温度;使用所测量的至少一个温度来估算该至少一个结构部件的尺寸;基于所述至少一个结构部件的所述估计尺寸计算与所述机器人的末端执行器的期望目的地相对应的一组关节坐标;基于所计算的关节坐标组计算所述末端执行器的最终目的地;确定从计算出的所述末端执行器的最终目的地到计算出的所述末端执行器的期望目的地的轨迹;确定在所确定的轨迹上的多个中间点;以及使用在所确定的轨迹上的所确定的多个中间点来控制引起所述末端执行器运动的至少一个电机。
[0295]
在另一示例中,一种装置包括驱动器;连接到所述驱动器的可移动臂,所述可移动臂包括在肩部处连接到所述驱动器的第一连杆、在肘部处连接到所述第一连杆的第二连杆、以及在腕部处连接到所述第二连杆的至少一个第三连杆;以及位于所述第二连杆中的至少一个第一致动器,所述第一致动器被配置成使所述至少一个第三连杆围绕所述腕部旋转。通过第二连杆实现热管理、功率分配或通信中的一个或多个。
[0296]
在另一示例中,一种方法包括:提供驱动器;提供连接到所述驱动器的可移动臂,所述可移动臂包括在肩部处连接到所述驱动器的第一连杆,在肘部处连接到所述第一连杆的第二连杆,以及在腕部处连接到所述第二连杆的至少一个第三连杆;以及提供位于所述第二连杆中的至少一个第一致动器,所述第一致动器被配置成引起所述至少一个第三连杆围绕腕部旋转。通过第二连杆实现热管理、功率分配或通信中的一个或多个。
[0297]
一种装置,包括至少一个处理器;以及包括计算机程序代码的至少一个非暂时性存储器,该至少一个存储器和该计算机程序代码被配置成与该至少一个处理器一起引起该装置至少执行:移动连接到驱动器的臂,所述臂包括在肩部处连接到所述驱动器的第一连杆,在肘部处连接到所述第一连杆的第二连杆,以及在腕部处连接到所述第二连杆的至少一个第三连杆;以及通过位于所述第二连杆中的至少一个第一致动器使所述至少一个第三连杆绕所述腕部旋转。通过第二连杆实现热管理、功率分配或通信机构中的一个或多个。
[0298]
应当理解,前面的描述仅仅是说明性的。本领域技术人员可以设计各种替换和修改。例如,来自上述不同实施例的特征可以选择性地组合到新的实施例中。因此,本说明书旨在包含所有这些替换、修改和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1