用于检测线缆的环境变化的方法与流程
1.本发明涉及用于检测牵引、升降或边界线缆的与个人、动物或物体靠近该线缆有关的环境变化的方法以及用于执行该方法的设备。
背景技术:
2.线缆驱动的并联机器人在工业上具有光明的前景。实际上,这些机器人能够升降并操纵可能很重和/或庞大的负载或工作工具。这些机器人是由连接到底座和连接到吊篮或效应器的至少两条线缆组成的并联机构。线缆驱动的并联机器人的升降或牵引线缆能够达到大于十米的长度。障碍物、特别是人向这些牵引或升降线缆中的一条线缆的靠近代表着真正的危险。有必要确保这些机器人周围的安全性。
3.在工业上,为了防止人和机器人之间的任何碰撞或事故,进入机器人的工作区是被禁止的。当前线缆驱动的并联机器人会占用很大的区域,从而导致可用空间的损失。另外,在机器人活动时对机器人的操作区的任何介入都会迫使停止并因此导致活动减速。
4.对于包括线缆的其他升降结构(例如起重机)也可能遇到类似问题。通过安全条例和培训来确保安全性。因此,人类参数很重要并且疏忽可能导致严重后果。
5.此外,这些线缆的结构使得它们难以通过视觉检测手段进行检测。实际上,线缆很长并且具有与其长度相比相对小的直径,其通过图像分析进行的检测相对无效。
6.另外有用的是能够确保由线缆(例如,可收缩安全栅)界定的区域的安全性,以防止对该区域的任何入侵。
技术实现要素:
7.发明声明
8.因此,需要得益于一种方法,该方法易于用在各种系统中并且能够使线缆驱动的并联机器人或其他类型的升降或牵引机器(例如起重机)的升降或牵引线缆附近的区域安全,其目的是防止任何碰撞。另外,还具有检测入侵由至少一条线缆界定的区域的风险的益处。
9.发明概述
10.本发明的目的是满足这些需求中的一些或全部,并且在本发明的一个方面,通过一种用于检测升降、牵引或边界线缆的至少一个导电部分附近的环境变化的方法来实现该目的,该环境变化与至少一个个人、动物或物体相对于所述部分的相对移动有关,所述方法包括以下步骤:检测表示所述移动的所述部分的电容变化。
11.特别地,所述线缆可以为线缆驱动的并联机器人或其他类型的升降或牵引机器(例如起重机)的升降或牵引线缆,所述环境变化与所述个人、动物或物体靠近所述部分有关,从而导致所述个人、动物或物体与所述部分碰撞的风险并因此构成潜在障碍物。
12.本发明能够基于监视所述线缆部分的电容变化来自动检测线缆附近障碍物的存在。
13.本发明的优势在于可以忽视外部干扰、尤其是与环境相对湿度有关的外部干扰,而不必执行定期校准,从而提高检测的可靠性。
14.导电线缆部分处于预定可变电位并且在其周围发射径向电场。入侵会导致该电场变化,导电线缆部分的自电容变化可以反映该电场变化。
15.有利地,电容可以用与电容成比例的电压反映:v=k x c。通过电子手段分析该电压的变化能够检测导电线缆部分附近障碍物的存在,甚至能够识别障碍物和/或确定障碍物的距离。
16.根据本发明的方法的优势之一是能够安全开发线缆正在移动的区域,而不需要从物理上禁止个人接近该区域。该区域例如为线缆驱动的并联机器人的操作区或位于起重机附近的区域。
17.如果线缆是边界线缆,则环境变化与个人、动物或物体靠近所述部分有关,从而导致入侵的风险。于是本发明能够使由可能特别长且可能难以监测的至少一条线缆界定的区域安全。该线缆可以限定该区域,例如该线缆围绕该区域或者存在于能够进入该区域的通道处。
18.防护屏障
19.根据一个实施方式,所述线缆至少部分地围绕引导、驱动和/或缠绕系统延伸。该引导、驱动和/或缠绕系统可以包括至少一个滑轮和/或至少一个缠绕器和/或至少一个支撑结构,例如动臂起重机。
20.该引导、缠绕和/或驱动系统可能经受构成该系统的机械元件的电气影响。该电气影响产生易于干扰所述移动的电容检测的电容耦合。处于线缆的电位的屏障可以至少部分地围绕这些机械元件中的一者或多者延伸,尤其是至少部分地围绕线缆引导、驱动和/或缠绕系统延伸。
21.因此,有利地,所述线缆在其长度的面对屏障的至少一部分上延伸,所述屏障特别是通过电压跟随器升高到所述预定电位。
22.该升高到线缆的电位的屏障能够减小或者甚至消除线缆与构成引导、驱动和/或缠绕系统的元件的电容耦合。在不存在升高到线缆的电位的屏障时,电容耦合比线缆的自电容高得多。不存在屏障的缺点在于比率c
obstacle
/c
cable
比存在屏障时小得多,从而降低电容检测的灵敏度。
23.对于给定的线缆长度l’,面对升高到预定电位的屏障的该线缆部分的电容有利地始终相同,优选为零。
24.该屏障还可以至少部分地由接地屏蔽物围绕。线缆的面对屏障和屏蔽物的部分则与外部电气影响隔离。
25.引导、驱动和/或缠绕系统可以与线缆电绝缘,特别是通过被电绝缘材料覆盖而与线缆电绝缘。
26.所述线缆可以从缠绕和/或驱动系统上解绕,可以通过补偿由解绕线缆长度l的修改引起的负载的变化来执行检测所述至少一个导电部分的电容变化。例如,特别地,可以在任何时刻通过角度编码器定义该解绕线缆长度l。
27.可以通过升高到线缆的预定电位的屏障和/或接地屏蔽物来隔离线缆的缠绕部分。
28.因此,在本发明的一个实施方式中,获取表示所述线缆部分的电容变化的量以及表示所述线缆的移动(特别是缠绕或解绕)的量,则能够确定电容变化主要是因为线缆的移动和/或还是因为线缆附近例如易于构成障碍物的个人、动物或物体的存在。
29.牵引之下的元件
30.导电线缆部分可能受到其他外部元件的电气影响。
31.线缆例如可以附接到一元件。该元件可以是固定系统和/或负载和/或操作工具和/或吊篮、或者任何其他可以固定到线缆的元件。然后,与该元件接触的线缆部分可能受到所述元件的电气影响。
32.为了限制这种影响,如果需要,则导电线缆部分可以在小于线缆的长度的长度上延伸;优选地,线缆的远端部分不发射电场。因此,该元件不固定到导电部分,则电气影响不会干扰所述移动的电容检测。
33.替选地,所述导电部分延伸直到线缆的远端。在这种情况下,导电部分可以包括整个线缆。于是可以沿整个线缆执行所述移动的检测。
34.附加地,所述部分可以与附接到线缆的元件的导电部分电接触。因此,线缆和元件都对场效应敏感并能够对个人、动物或物体的靠近进行电容检测。
35.这是有利的,因为障碍物靠近固定到线缆的元件可能导致碰撞,优选地,通过电容检测使其对障碍物的靠近同样敏感。
36.固定到线缆的元件例如被导电涂料或导电橡胶覆盖,以能够使其导电。
37.附加地,线缆可以包括向通过线缆移动的元件供电的至少一个导体,该元件可选地包括效应器,该效应器可以由线缆供电,例如通过位于该元件上、特别是位于吊篮上的连接器供电。该供电电导体可以至少由升高到所述预定电位的屏障围绕,所述至少一个导电部分位于该屏障外部。此外,接地屏蔽物可以围绕该屏障,所述至少一个导电部分位于该屏蔽物外部。
38.于是,线缆除了拖拉和/或升降所述元件外还能够为该元件供电。例如,该元件可以包括操作工具,诸如涂画机器人、铆钉枪或钻机。
39.参考数据
40.电容随时间和/或根据线缆移动的变化可以与参考数据进行比较,从而检测个人、动物或物体的存在,识别个人、动物或物体和/或估计个人、动物或物体距线缆的距离。
41.参考数据可以包括针对给定情形测量或存储的表示线缆的电容或电容变化的所有值。
42.例如,参考数据可以包括当个人、动物或物体位于距线缆距离d时测量的电压变化。检测到电压变化基本上等于该测量的变化能够给出关于在距线缆距离d处存在个人、动物或物体的警报。
43.参考数据可以包括当个人、动物或物体位于距线缆各种距离d时测量的一组电压变化。于是,例如,与该数据进行比较能够估计到个人、动物或物体的距离。
44.参考数据还可以包括在不存在个人、动物或物体时或者在包括静态障碍物的操作环境中,在缠绕线缆期间针对给定的线缆的解绕长度l测量的一组电容值。检测到针对给定长度的电容不同于参考数据中包含的电容,则可以表明存在个人、动物或物体或者存在故障。
45.可以在线缆正在进行预定轨迹时和/或针对给定长度的线缆和/或如果线缆存在位于距线缆给定距离的个人、动物或物体时,测量参考数据。
46.参考数据可以取决于例如以下参数:线缆的长度和/或个人、动物或物体距线缆的距离和/或线缆附近存在静态障碍物和/或存在固定到线缆的元件。
47.参考数据可以是电压、电容、电流,或者是无量纲的,例如电压比。可以通过获取由电路、特别是由电子调节器传递的至少一个电压,来确定电容变化。
48.可以通过实验、例如在实验室中获得参考数据。
49.可以在线缆的操作区中通过校准步骤获得参考数据。
50.个人、动物或物体的指纹
51.根据本发明的方法可以包括获取参考数据,该参考数据通过执行个人、动物或物体以预定方式相对于所述线缆部分的移动来获取,于是该参考数据被称为“电容指纹”。该获取然后可以在个人、动物或物体距线缆的距离d改变时,获得个人、动物或物体相对于线缆的相对移动引起的电容演变。因此,针对给定的一组距离,个人、动物或物体对线缆的电容的影响根据线缆与个人、动物或物体之间的距离的变化是已知的,该影响与线缆的长度无关。
52.可以定义由个人、动物或物体的靠近引起的线缆的电容的相对变化δc(d)/c(l,d),称为“相对灵敏度”,其取决于线缆的长度。例如在解绕线缆之后,线缆的电容越大,则相对灵敏度越低。
53.个人、动物或物体的指纹的参考数据特性基本上根据例如个人、动物或物体的高度和/或表面积而改变,确定电容和/或电压的变化的上限和/或下限以建立参考数据是有利的。
54.获取参考数据有利地可以使得通过与对应于许多不同的个人、动物或物体的参考数据进行比较,来识别在线缆附近检测到的个人、动物或物体。
55.参考数据优选包括人的线缆上的电容指纹。人的线缆上的电容指纹可以例如通过随着d增大而以1/d减小电压变化来估计,d为人距线缆的距离。
56.轨迹的签名
57.根据本发明的方法同样可以包括通过为线缆和/或附接到线缆的元件赋予预定移动来获取参考数据,尤其是考虑由线缆移动的静态环境的存在引起的电容变化,该参考数据称为“电容签名”。
58.可以确定电容变化,从而定义针对线缆的长度的减小或增大l
±
δl所期望的电容变化。这能够估计在不存在个人、动物或物体时在两个点mi和m
i+1
之间的所期望的电容变化。
59.例如,基于该变化率的检测尤其可以避免相对于获取时间较慢的干扰,诸如空气的相对湿度的变化。
60.防护措施
61.根据本发明的方法优选包括以下步骤:在检测到个人、动物或物体靠近所述线缆的所述部分的情况下,执行至少一个预定动作,该动作尤其选自:生成视觉、声音或触觉警报;停止线缆和/或由线缆移动的元件的移动;禁止启动和/或重启。
62.在可能与障碍物碰撞之前可以降低线缆行进距离上线缆的移动速度和/或在可能
与障碍物碰撞之前可以修改线缆的轨迹。
63.本发明有利地用以检测人与线缆驱动的并联机器人的至少一些线缆碰撞的风险,或者用以检测人靠近边界线缆或避开边界线缆,例如人处于可收缩安全栅内部时。
64.在边界线缆的情况下,优选地生成声音警报,从而警告个人正在靠近线缆或跨越线缆。同样可以通过通信手段发送警报,以警告检测到与个人、动物或物体靠近线缆有关的线缆的环境变化。
65.在检测到个人、动物或物体的情况下,之后可以通过光学传感器、尤其通过图像识别系统来识别这些个人、动物或物体。识别个人、动物或物体可以调整要进行的动作,特别是在关注障碍物的时候。存储源自识别个人、动物或物体的数据以及所检测的电容变化可以丰富参考数据,例如通过定义个人、动物或物体的电容指纹来丰富参考数据。
66.根据本发明的设备有利地被配置成符合安全性标准,例如en iso 13849-1和/或iec 61508和/或cem 2014/30/eu指令和/或2014/35/eu低电压指令,优选至少分别覆盖低性能等级pla和/或低安全完整性等级sil1,更好地分别覆盖高性能等级ple和/或高安全完整性等级sil3。
67.然后,所述设备有利地被配置成减少系统的和/或随机的故障。随机的故障尤其取决于所述设备的部件的可靠性,该可靠性例如通过部件的平均故障时间(mttf)、故障率λd和/或使用寿命来定义;部件的优选冗余架构优选地分别符合标准en iso 13849-1和iec 61508的1oo2或类别b至4的架构,和/或cem 2014/30/eu指令和/或2014/35/eu低电压指令,和/或包括对部件的功能的监测,以及对设备的功能的监测。
68.优选地,在启动设备时和/或在线缆运行期间周期性地实施对设备的功能的监测。线缆优选包括至少一个元件,该至少一个元件能够在线缆用在升降或牵引或边界设备中时监测设备的操作,特别地,该至少一个元件固定到线缆并且适于由位于设备的缠绕器的入口处和/或在线缆附近的传感器进行检测。该元件例如是围绕线缆的导电环或位于线缆上的rfid标签,rfid读取器存在于缠绕器的入口处。监测元件可以被配置成由机电检测器或电感检测器进行检测。监测元件可以是围绕线缆的环(例如金属环)或者是固定到线缆的rfid标签,rfid读取器位于缠绕器的水平上和/或在线缆附近。
69.替选地和/或附加地,监测元件可以位于线缆内部。
70.替选地和/或附加地,监测元件可以位于一条或多条线缆附近(在吊篮或效应器上)或者一条或多条线缆的移动包络线内部。
71.设备的监测元件能够验证没有随时间的漂移会导致怀疑所测量的个人、动物、物体或障碍物的检测值。
72.通过这些监测元件之一检测到故障和/或漂移优选地导致停止线缆的运行和/或警报,例如声音和/或视觉警报。
73.监测元件尤其能够监测线缆的正确运行,而与其他线缆和/或线缆的环境无关。
74.线缆结构
75.多种线缆结构可以用于实施根据本发明的方法。术语“线缆”不应被理解为限制性含义,而是包括能够被缠绕和被解绕的任何细长的柔性结构。
76.线缆的尺寸可以被设计成承受其可能经受的牵引力。
77.预定电位可以被直接施加到线缆,导电线缆部分则为整个线缆。该线缆例如为钢
缆。
78.替选地,线缆可以包括升高到预定电位的至少一个电导体,尤其是不同于经受牵引力的芯部或股线的至少一个电导体。优选地,线缆包括分别升高到预定电位的至少两个电导体。这两个电导体可以在同一线缆部分上延伸。电导体的冗余尤其能够实现检测电导体中的至少一者的可能故障或劣化。这两个电导体可以在线缆的两个不同部分上延伸,这两个部分在沿线缆的长度、宽度和/或位置方面不同。这些部分可以连接在一起、部分重叠、或分开。
79.线缆的横截面不限于圆形截面。实际上,根据本发明的线缆可以特别地具有矩形截面或有角扇形截面,线缆例如为平坦悬带的形式。该线缆可以是两个动臂起重机之间的可收缩带。
80.线缆可以是钢缆,例如镀锌的、编织的多股线钢缆,例如采用矩形截面的编织的或未编织的钢带、例如镀锌钢带的形式。线缆还可以采用矩形截面、穿孔或未穿孔的金属带的形式。线缆可以由被导电膜(例如铝或铜)围绕的玻璃纤维组成,该导电膜被绝缘体(尤其是橡胶)保护。线缆可以由导电的橡胶制成。该列表并非限制性的。
81.线缆可以是裸露的或者由电绝缘体(例如硫化橡胶)覆盖,能够承受与线缆的作用有关的机械应力。导电部分优选被电绝缘体覆盖。
82.电绝缘体尤其可以将线缆、特别是导电部分与由于与外部元件、特别是用于引导、驱动和/或缠绕线缆的系统接触引起的电气干扰隔离。
83.线缆包括例如至少一个芯部,该至少一个芯部优选适于经受牵引力,所述至少一个导电部分包括与该芯部不同的至少一个电导体。
84.线缆的所述至少一个电导体可以包括一个或多个与芯部电绝缘并沿芯部延伸的电导体,特别是导线、磁带、编织带或条带,特别地,通过被电绝缘体、例如硫化橡胶覆盖而与芯部电绝缘。
85.电导体可以是电线(例如成股的铜线)或金属带。
86.电导体可以成螺旋形地缠绕在芯部周围。有利地,螺旋形缠绕间距沿线缆是恒定的。缠绕间距越短,则检测灵敏度越大。然而,电导体的长度越长,则自电容越大。可以找到折中办法来优化电容检测的灵敏度。
87.当线缆向通过线缆移动的元件供电时,该元件有利地包括被绝缘体覆盖的接地的第一导电屏障,该绝缘体本身被升高到线缆的预定电位的第二导电屏障覆盖,该第二导电屏障被绝缘体覆盖。接地屏障屏蔽由线缆中的电流循环引起的电气干扰。升高到预定电位的屏障能够提高电容检测的灵敏度。
88.通过线缆移动的元件可以通过电源来供应电力,该电源被配置成传递直流电压(例如约24v或约48v)、单相交流电压(例如约230v)、或三相交流电压(例如约400v)。
89.根据本发明的这种线缆有利地可以尤其传递直流电压或单相交流电压或三相交流电压。
90.在直流电压的情况下,线缆有利地包括两个导电芯部和保护导体(这与电磁兼容性有关)。
91.在单相交流电压的情况下,线缆有利地包括两个(分别为带电的和中性的)导电芯部以及保护导体(取决于所选择的中性机制以及所连接的终端元件的保护)。
92.替选地,由同一线缆承载的导电芯部和保护导体也可以由根据本发明的机器的多条不同的线缆承载,特别是由三条不同的线缆承载。
93.在一变型中,线缆包括至少一个保护导体和四个导电芯部、尤其是三个带电相和中性,该中性的配置取决于所选择的中性机制(接地中性、接地到中性、绝缘中性)。以此方式限定的线缆尤其能够实现传递三相交流电压。替选地,如上所述,这些导电芯部和保护导体可以由机器(并联机器人、起重机、边界设备
……
)的不同线缆承载。
94.根据本发明的线缆可以通过一根或多根导线承载模拟或数字信号,所述导线优选位于芯部中并且被接地的第一导电屏障覆盖,该第一导电屏障被绝缘体覆盖,该绝缘体被升高到预定电位的第二导电屏障覆盖,该第二导电屏障被绝缘体覆盖。
95.线缆可以具有彼此电绝缘的至少两个连续部分,所述至少两个连续部分同时或按顺序经受预定可变电位,从而检测这些连续部分中的每一者附近个人、动物或物体的可能存在并且能够沿线缆的长度定位个人、动物或物体。
96.定位个人、动物或物体的优势在于能够触发最适合于现况的防护措施,例如在线缆驱动的并联机器人附近检测并定位到障碍物的情况下修改线缆的轨迹。
97.根据本发明的方法有利地包括以下步骤:电容检测一方面在线缆的整个长度上执行,另一方面在线缆的长度的至少一段上执行,所述线缆的长度的至少一段的位置是已知的,更好地,电容检测在线缆的长度的至少两个连续段上执行,所述线缆的长度的至少两个连续段的相应位置是已知的。根据本发明提供的该实现方式能够实现冗余和定位结合。
98.个人、动物或物体可以相对于线缆被定位和/或通过至少一个光学传感器、例如通过图像识别系统来识别。
99.电容获取
100.所述至少一个导电线缆部分可以通过连接到包括尤其是电压发生器的电子电路来升高到预定电位v。
101.例如通过测量注入到该线缆部分中的电流来检测电容变化。
102.线缆的表面电荷由电流i产生,电流i可以通过测量电子电路中与电压发生器串联的电阻的端子处的电压来间接定义。
103.检测的灵敏度有利地取决于线缆中流动的电流的值并因此取决于线缆升高到的电位、供应线缆的电压发生器的频率、以及电阻值。可以通过增大预定电位的值和/或频率和/或通过减小电阻值,来提高电容检测的灵敏度。
104.预定电位例如为交流电压,优选处于10khz与100khz之间的频率处,尤其是正弦电压;该电位优选具有在10v和100v之间(包括10v和100v)的峰到峰振幅。
105.根据本发明的方法可以包括以下步骤:在连接到线缆的电子部件(例如仪表放大器)的输出端处执行电压测量,从而能够监控流过该电子部件以在线缆表面上产生电荷的电流。可以根据测量的电压推断出电容。电子电路可以包括一个或多个运算放大器、例如jfet。
106.在所述至少一个导电部分的表面处测量的电流有利地小于1ma。因此,任何意外接触、特别是与人的意外接触不会有危险。
107.对于具有在10m和20m之间(包括10m和20m)的长度的线缆,线缆的电容可以小于1nf,更好地小于大约100pf。对于10kω的电阻,检测响应时间τ=r
×
c则较短,例如等于1μ
s。这种响应时间有利于避免任何碰撞以及在例如入侵发生时更快地干预。
108.电容检测响应时间有利地与线缆的移动速度和/或人步行移动的速度匹配。
109.对于预定的解绕线缆长度l,在不存在个人、动物或物体时,电容检测设备的整体的电容模型可以如下表示:
110.[数学式1]
[0111]
c(l)={(k
×
l+c0+c
element
)+c
ext env
}
[0112]
其中,k为导电线缆部分的每单位长度的电容系数,c0为由一组杂散电容产生的电容,c
ext env
为由与静态环境电交互而产生的电容,c
element
为固定到线缆的元件的电容,该元件尤其是通过线缆移动的吊篮和/或效应器。该方法优选包括以下步骤:最小化杂散电容c0,包括例如由于电子电路中电子调节器的存在而产生的电容c
p
和/或缠绕线缆部分的电容c
wound
。与解绕导电线缆部分k
×
l的电容相比,电容c
wound
优选是可忽略的,这尤其是由于升高到预定电位的屏障和接地屏障。c
wound
优选小于10pf。
[0113]
检测系统
[0114]
本发明的另一方面应用于一种装置,尤其是升降机器或线缆驱动的并联机器人,所述装置包括具有至少一个导电部分的至少一条升降或牵引线缆以及检测系统,所述检测系统被配置成将所述部分升高到预定可变电位并且检测表示所述部分附近存在障碍物的所述部分的电容变化。
[0115]
该装置可以包括至少三条升降或牵引线缆,每条升降或牵引线缆具有用于障碍物的电容检测的至少一个敏感的导电部分。每条线缆都可以包括至少一个电导体和相关联的检测系统。因此可以具有与线缆同样多的检测系统,这些检测系统同时操作。这些检测系统可以共同拥有至少一些处理电路,这些处理电路尤其用于在检测到障碍物时作用于线缆的驱动装置。同样可以具有与至少两条线缆相关联的检测系统,所述至少两条线缆通过例如要移动的效应器或吊篮连接在一起,使这两条线缆之间具有电气连续性。
[0116]
可以通过固定到线缆的元件向线缆供电。例如,两条线缆分别提供带电导体和中性导体且另一条线缆提供保护导体。电源也可以是低压电源。
[0117]
本发明的另一方面涉及一种升降或牵引线缆,所述线缆包括经受牵引力的至少一个芯部、与所述芯部电绝缘的至少一个导电屏蔽物、以及设置在所述屏蔽物的外部的至少一个电绝缘检测电导体。
[0118]
该线缆可以包括一起沿线缆的长度的至少一部分延伸的适用于电容检测的至少两个电导体。替选地,适用于电容检测的两个电导体分别在线缆的不同长度上延伸。
[0119]
这两个电导体可以同时或按顺序各自升高到预定可变电位,从而执行根据本发明的电容检测。
[0120]
本发明的又一方面涉及一种装置,该装置对应于边界设备、特别是可收缩安全栅,该装置包括具有至少一个导电部分的至少一条边界线缆、和检测系统,该检测系统被配置成将所述部分升高到预定可变电位并检测表示所述部分附近的个人、动物或物体相对于所述部分的移动的所述部分的电容变化。在更复杂的变型中,根据本发明的这种装置还可以根据上述实施方式中的至少一个实施方式通过直流或交流电压向与其连接、集成到线缆中或外部的至少一个系统(例如发光和/或声音警告系统)供电,和/或还可以包括如上所述的至少一个监测元件。
附图说明
[0121]
通过阅读以下本发明的非限制性实施方式的详细描述以及检查附图,能够更好地理解本发明,附图中:
[0122]
[图1]图1部分地并示意性地表示根据本发明的线缆驱动的并联机器人装置,
[0123]
[图2]图2示出了通过电压发生器向线缆供电,
[0124]
[图3]图3示出了当个人、动物或物体靠近时图2中的线缆的反应,
[0125]
[图4]图4表示电场强度根据到线缆的距离的演变以及电压根据到线缆的距离的演变,
[0126]
[图5]图5示出了线缆的一部分上的屏障的效应,线缆的该部分定位成面对该屏障,
[0127]
[图6]图6示意性地表示用于缠绕电绝缘的线缆的系统,
[0128]
[图7]图7是根据本发明的变型装置的类同于图1的视图,
[0129]
[图8]图8部分地并示意性地表示其中对两条线缆执行检测的变型装置,
[0130]
[图9a]图9a是线缆示例的截面图,
[0131]
[图9b]图9b是线缆示例的截面图,
[0132]
[图9c]图9c是线缆示例的截面图,
[0133]
[图9d]图9d是线缆示例的截面图,
[0134]
[图9e]图9e是线缆示例的截面图,
[0135]
[图9f]图9f是线缆示例的截面图,
[0136]
[图9g]图9g是线缆示例的截面图,
[0137]
[图9h]图9h是线缆示例的截面图,
[0138]
[图9i]图9i是线缆示例的截面图,
[0139]
[图9j]图9j是线缆示例的截面图,
[0140]
[图9k]图9k是线缆示例的截面图,
[0141]
[图9l]图9l是线缆示例的截面图,
[0142]
[图9m]图9m是线缆示例的截面图,
[0143]
[图9n]图9n是线缆示例的截面图,
[0144]
[图9o]图9o是线缆示例的截面图,
[0145]
[图9p]图9p是线缆示例的截面图,
[0146]
[图10]图10示出了使用三条线缆向固定到这些线缆的负载供电,
[0147]
[图11]图11示意性地表示能够定位个人、动物或物体的线缆示例,
[0148]
[图12]图12表示用于提供双重检测的电子电路,
[0149]
[图13]图13表示根据本发明的装置的一个示例的框图,
[0150]
[图14]图14表示固定到负载的两条线缆的轨迹的示例,
[0151]
[图15]图15是将校准步骤期间记录的不依赖于周边环境的相对湿度的数据分组的表格,
[0152]
[图16]图16以表格的形式表示转换成八条线缆所需的电压的参考数据的示例,每条线缆包括执行预定移动的两个电导体,
[0153]
[图17]图17是示出了针对个人、动物或物体的不同面积,线缆的电容的演变的曲
线图,
[0154]
[图18]图18示出了线缆和人的不同相对配置,
[0155]
[图19]图19示意性地表示电绝缘的卷绕滚筒,
[0156]
[图20]图20示意性地表示电绝缘的滑轮,
[0157]
[图21]图21示意性地表示根据本发明的可收缩安全栅装置,
[0158]
[图22a]图22示意性地表示个人入侵的情形,
[0159]
[图22b]图22b示意性地表示个人靠近线缆的情形,
[0160]
[图23]图23示意性地表示根据本发明围绕线缆的环,
[0161]
[图24]图24部分地并示意性地表示其中对两条线缆执行检测的变型装置,
[0162]
[图25]图25表示根据本发明的装置的示例的示意框图,
[0163]
[图26]图26表示信号调节器的示例,
[0164]
[图27]图27示出了根据本发明的装置的连接到信号调节器的两条线缆,
[0165]
[图28]图28表示信号调节器的示例,
[0166]
[图29]图29表示根据本发明的装置的示例的示意图。
具体实施方式
[0167]
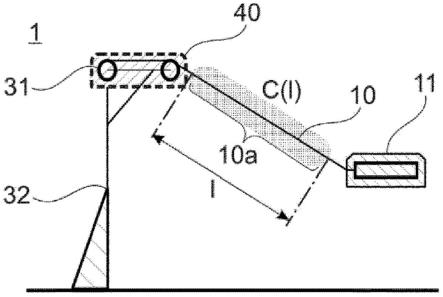
图1中示意性地且部分地表示根据本发明的线缆驱动的并联机器人1的示例,线缆驱动的并联机器人1包括支撑结构32、缠绕系统31和线缆10,线缆10的至少一部分10a是导电的。
[0168]
元件、特别是负载11可以固定到线缆的远端。机器人的连接到负载11的其他线缆未示出。
[0169]
有利地,缠绕系统31设置在支撑结构32的顶部,使得除了能够减小线缆10的长度,还能够减小对线缆10的电磁干扰和电容影响。
[0170]
在未示出的变型中,缠绕系统31还位于支撑结构32上,例如位于支撑结构32的底部。如图1所示,导电部分的长度l可以小于线缆的长度l。以图1为例,线缆的端部不导电。
[0171]
缠绕系统31可以包括机动缠绕器和/或编码器,以确定解绕线缆的长度。
[0172]
优选地,编码器为在缠绕系统31的水平上实现的绝对型编码器。
[0173]
导电部分10a发射围绕它的径向电场。障碍物的存在引起电场变化,并因此引起线缆的电容变化。
[0174]
线缆的电容c基本上与对电容效应敏感的导电线缆部分的解绕长度l成比例。当线缆10拖拉或升降负载11时,该长度l可能改变。线缆的电容可以使用公式c(l)=k
×
l来估计,其中k为每单位长度的电容系数。
[0175]
图2高度示意性地示出了通过连接到内部电阻rg的电压发生器vg而升高到预定电位v的导电线缆10。根据库仑定律,表面电荷的排斥力等于发生器的注入力,对于正弦发生器,线缆10处于静电平衡或准静态平衡。表面电荷于是在线缆10的整个长度l上均匀分布。
[0176]
图3表示位于个人、动物或物体20附近的类似于图2中的线缆的线缆10。线缆表面上的电荷不再均匀分布。根据对应元素理论,位于个人、动物或物体表面上相反符号的电荷与线缆发生反应。线缆10的表面电荷不再对抗发生器的注入力,发生器于是注入数量等于与个人、动物或物体20相互作用的数量的新电荷。然后可以使用如下公式来估计电容:c=cself
+c
ext env
+c
ind,ani,obj
,其中c
self
为结构的自电容,在本示例中该结构为线缆10,c
ext env
为静态环境的电容,在本示例中被认为是零,以及c
ind,ani,obj
为个人、动物或物体20的电容。然后可以观察到电荷密度的增大q+δq并因此观察到电容的增大c+δc以及由发生器输送的产生电能的电流的增大i+δi。对于个人、动物或物体与线缆分开的预定距离d、固定的线缆长度l和线缆半径r,可以通过以下公式来定义电荷密度:
[0177]
[数学式2]
[0178]
q=i
×
t=2πrlσ=c
×v[0179]
其中,σ为导电线缆部分的表面电荷密度以及t是时间。可以通过以下数学式定义电容:
[0180]
[数学式3]
[0181][0182]
其中,ε0为真空介电常数以及d
∞
为距离,针对该距离,c(d
∞
)≈0。
[0183]
距离d
∞
例如等于约0.5m。距离d
∞
优选大于2m,更好地大于3m。
[0184]
在图3中示意性地表示的个人、动物或物体20例如为人。特别地,个人、动物或物体对线缆的电气影响以1/d改变,d为距个人、动物或物体的距离。
[0185]
线缆的缠绕在缠绕系统31上的部分不对障碍物构成任何危险。此外,该线缆部分可能受到构成缠绕系统31的机械元件的电气影响。这些电气影响可能产生妨碍对障碍物的电容检测的电容耦合。
[0186]
出于这些原因,优选地,缠绕系统31被图1中所示的保护系统40围绕,保护系统40减小缠绕到缠绕系统上的线缆部分上的表面电荷密度。保护系统40优选包括屏障41,该屏障41升高到线缆的预定电压v,并被接地屏蔽物42围绕。
[0187]
图6表示线缆10的缠绕系统31的示例,缠绕系统31包括被保护系统40围绕的一个或多个滑轮71以及缠绕器72。保护系统40包括:升高到线缆10的预定电位的屏障41,从而减小面对该屏障41定位的线缆部分的表面电荷密度;以及接地屏蔽物42,其围绕屏障41并防止线缆经受电磁干扰和外部电容耦合。
[0188]
图5示意性地示出了定位成面对线缆部分10的屏障41的效应。在图5的示例中,屏障41通过电压跟随器升高到线缆的预定电位v。长度为l’的线缆部分10b的表面电荷密度σ’小于未定位成面对升高到预定电位v的屏障的导电线缆部分10a的表面电荷密度σ。实际上,面对屏障41的线缆部分10b与屏障41处于相同电位v,它们在总的电气影响下。因此,该线缆部分10b的表面上没有存储电荷。因此,与未放置成面对所述屏障41的长度为l的线缆部分10a的电容相比,放置成面对所述屏障41的长度为l’的部分10b的电容变得可忽略:
[0189]
[数学式4]
[0190]
c(l)=c(l)+c(l
′
)≈c(l)=k
×
l
[0191]
与表面密度σ相比表面密度σ’越低,未放置成面对所述屏障41的升高到预定电位v的线缆部分10a的电容检测的相对灵敏度越高。
[0192]
电容检测的灵敏度还依赖于个人、动物或物体20相对于线缆10的距离d。
[0193]
图7表示图1中的结构1的变型。在本示例中,固定到线缆10的远端的负载11升高到
线缆的预定电位v。导电线缆部分对应于整个线缆。负载11通过电容检测变得对障碍物20的靠近敏感。如图6的示例那样,与支撑结构32和/或缠绕和驱动系统31接触的线缆部分通过升高到线缆的电位v的屏障41和/或接地屏蔽物42而电绝缘。
[0194]
与支撑结构32接触的线缆部分可以位于升高到线缆10的预定电位v的屏障内部。固定件(如果有)和负载可以被导电材料、例如导电涂料或导电橡胶覆盖。于是,可以使用公式c(l)=k
×
l+c
load
来估计用于电容检测的敏感系统的电容,其中c
load
为与负载11有关的电容。
[0195]
如图10示意性地示出的,线缆驱动的并联机器人可以包括至少三条线缆101、102、103,并且可以通过这三条线缆101、102、103向负载11供应电能。一条线缆可以提供带电导体,另一条线缆可以提供中性导体,第三条线缆可以提供保护导体。例如,向负载11供应交流电压为230v的电力、50hz的频率、3a的均方根电流。
[0196]
替选地,可以通过两条线缆或一条线缆向负载11供应电能。
[0197]
例如,通过两条线缆向负载11供应直流电压的电力。
[0198]
有利地,至少一条线缆被配置成能够传输信号,例如通过光传输或电力线载波电流来传输信号。
[0199]
优选地,线缆驱动的并联机器人包括至少四条线缆。
[0200]
优选地,线缆包括芯部,该芯部由成股的导电铜线构成,该铜线能够提供相导体、中性导体或保护导体。该成股的铜线的直径可以为约0.8mm。该成股的铜线优选被绝缘体围绕,并且屏蔽物优选围绕铜线以及绝缘体优选围绕屏蔽物。绝缘体和屏蔽物的厚度总计为大约0.6mm,于是具有绝缘体和屏蔽物的成股的铜线的直径为大约2mm。
[0201]
图8表示类似于图7中的线缆的两条线缆101和102,这两条线缆共同作用以操纵连接到它们的负载11,每条线缆处于预定电位。线缆101和102分别具有自电容c1和c2。
[0202]
线缆101和102之间的交互可能干扰障碍物检测。可以确定每条线缆的预定电位,以限制其他线缆和/或地和/或负载和/或吊篮和/或固定件的这些电气影响,特别是通过使预定电位改变来限制这些电气影响。
[0203]
替选地,一个或多个导电线缆部分经受相应的来自彼此的不同频率的可变电位。特别地,可以选择它们之间具有非整数比率的频率,以防止谐波造成的干扰。
[0204]
替选地,可以在获取和存储参考数据时并且然后通过比较来考虑与其他线缆和/或地和/或负载和/或吊篮和/或固定件的影响有关的干扰。
[0205]
图24表示图8中的结构的变型,其包括分别具有电容c1和c2的两条线缆101和102。每个支撑结构32包括具有编码器33的缠绕系统31,该缠绕系统31优选地包括机动缠绕器。线缆101和102例如具有约10m的长度l以及小于或等于4mm的半径r。
[0206]
线缆101和102优选地各自包括至少两个检测电导体,所述电导体优选地为电绝缘的,优选地通过用硫化橡胶涂覆而为电绝缘的。
[0207]
此外,在图24的示例中,负载11设置有至少两个电导体,这至少两个电导体中的每一者作为线缆101和102中的一者的延伸。负载11例如永久地连接到线缆,该负载例如为固定到线缆的运货板。替选地,负载11可移除地附接到线缆,负载的电导体暂时连接到每条线缆的电导体。
[0208]
参考数据
[0209]
线缆驱动的并联机器人能够执行多种多样的任务,例如在飞机的各个部分上喷漆或者操纵巨大的和/或沉重的负载。根据应用,线缆驱动的并联机器人设置有不同的固定件并产生不同的轨迹。同样,可以出于各种原因而安装安全栅,检测可能用于检测特定类型的个体或者特别是线缆环境的变化,例如对应于人跨过栅栏或动物靠近危险区。
[0210]
执行至少一个学习阶段能够适应这些各种各样的应用。该学习阶段包括获取参考数据,参考数据特定于应用并且随后用作比较数据,以检测障碍物、或甚至识别障碍物和/或确定到障碍物的距离。
[0211]
图14示出了获取预定线缆移动的参考数据的示例,线缆例如为线缆驱动的并联机器人的一部分并且个人、动物或物体表示潜在障碍物。该移动例如由从点m1至点mn、经过点mi和mj的轨迹定义。从点mi移动到随后的点mj例如对应于至少一条线缆101、102的长度l1、l2的变化δl,例如δl=
±
1cm。可以用以下方式将点mi的坐标定义为笛卡尔坐标:
[0212]
[数学式5]
[0213][0214]
其中,ψi、θi、为线缆101、102相对于支撑结构32的旋转角、进动角和盘旋角。
[0215]
在图15的表格中表示的数据构成参考数据的示例,所述参考数据通过使线缆和/或附接到线缆的负载进行预定移动来获取,例如从而能够考虑由于线缆在其中移动的静态环境的存在而引起的电容变化。
[0216]
可以确定变化程度,从而限定针对一条线缆的长度减小或增大l
±
δl所预期的电容变化。特别地,使用电容变化程度使得可以忽略与获取时间相比缓慢的干扰、特别是相对湿度的变化。
[0217]
图15中示出的数据可以来源于包括p条线缆的线缆驱动的并联机器人的校准。针对每条线缆j(j在[1,p]范围内),在点mi(i在[1,n]范围内)处测量电压。基于该数据,然后可以确定δv
s,j
(m
i+1
–
mi),其表示两个连续位置mi和m
i+1
之间的电压变化程度。为了确定障碍物的存在,可以将参考变化率与在时间t处测量的电压进行比较,时间t优选为当前时间:
[0218]
[数学式6]
[0219]
δv
s,j
[(m
i+1
,t)-(mi,t)]-δv
s,j
[m
i+1-mi]=δ[δv
s,j
(m(t))]
[0220]
为了比较参考数据的电压与在时间t处测量的电压,可以针对长度为l的线缆j计算在点mi处的归一化水平:
[0221]
[数学式7]
[0222][0223]
其中,k为例如依赖于电子调节器的与电容转换成电压有关的系数。该水平的计算不仅使得能够忽略周边环境的相对湿度的变化,而且能够消除对线缆的解绕长度的依赖。
[0224]
为了确保安全性冗余,每条线缆j可以包括至少两个用于电容检测的电导体,例如
至少两条电线,例如沿线缆呈螺旋状缠绕的电线。每个电导体都具有其自电感。同一线缆的电导体的电容优选相似,优选相等。比较线缆的电导体的电容可以使得能够检测故障的存在。
[0225]
图16中的表格表示获取包括八条线缆的结构的给定轨迹的参考数据,这八条线缆并联作用,每条线缆包括两个电导体。第一行对应于当这八条线缆的结点或固定到这八条线缆的负载的重心位于点m1时每条线缆的第一导体的被转换为电压的电容的获取。第二行对应于当这八条线缆的结点或固定到这八条线缆的负载的重心位于点m1时每条线缆的第二导体的被转换为电压的电容的获取。
[0226]
同一条线缆的电导体具有基本上相等的电容,有利地,图16的表格中第一行的值基本上等于表格中第二行的值。
[0227]
获取参考数据还能够确定与特定个人、动物或物体相关的电容指纹。可以针对靠近线缆的人与线缆之间的一组预定距离、例如针对小于50cm的距离、例如以大约5cm的间距获取该人的电容指纹的参考数据特性。优选地,最大距离为使c(d
∞
)≈0的距离。
[0228]
图17示出了当人20靠近线缆10时针对固定长度l的线缆执行的参考数据测量的示例。对在线缆10附近的个人、动物或物体20的检测使得能够声称所述个人、动物或物体20位于小于或等于电容检测范围的距离处,即d≤d
∞
。为了能够确定个人、动物或物体距线缆的距离d,可以将所测量的电容变化与参考数据进行比较。参考数据例如是以恒定距离间隔δdh测量的电压值,并且优选地由于相对湿度变化可忽略而充分靠近在一起:
[0229]
[数学式8]
[0230][0231]
例如针对d
∞
等于约30cm、更好地等于约50cm,c(d
∞
)≈0以及vs(d
∞
)
l
={(k
×
l+c
load
)+c
ext env
}。
[0232]
当个人、动物或物体20、特别是人从d
∞
靠近距离δdh时,其影响可以被计算:
[0233]
[数学式9]
[0234]vs
(d
∞-δdh)
l
=vs(dh)
l
=k
×
[{(k
×
l+c
load
)+c
ext env
}+c(dh)]
[0235]
可以重复当个人、动物或物体20、特别是人从先前的位置d
∞-(n-1)δdh靠近线缆10距离δdh时计算其影响的步骤:
[0236]
[数学式10]
[0237]vs
(d
∞-nδdh)
l
=k
×
[{(k
×
l+c
load
)+c
ext env
}+c(dh)]
[0238]
具有固定表面积并位于距线缆10距离d处的个人、动物或物体20引起有利地总是相同的线缆的电容变化、特别是不随线缆的长度改变的电容变化。
[0239]
然而,人的电容指纹的参考数据特性根据例如人们的面积和/或高度而彼此有显著地改变,因此为了建立参考数据,确定电压变化的上限和下限是有利的。上限和下限可以通过加上或减去某一百分比值、例如5%来确定:
[0240]
[数学式11]
[0241]vs
(d
human
)=vs(d
human
)
±
5%
[0242]
人对线缆的电容的影响δc
human
会始终相同,而不论解绕线缆的敏感长度l如何。因此,对人,更一般地个人、动物或物体的靠近的电容检测的灵敏度取决于线缆的解绕长度l
的电容检测:
[0243]
[数学式12]
[0244][0245]
灵敏度对于0《l《1m例如在0.6%和4.8%之间(包括0.6%和4.8%),对于1《l《5m在0.5%和3.34%之间(包括0.5%和3.34%),对于5《l《10m在0.45%和3%之间(包括0.45%和3%),dh在5cm和30cm之间(包括5cm和30cm),线缆的总长度为15m以及电导体的半径为2mm。
[0246]
替选地,可以执行多次测量,以确定在存在个人、动物或物体20时根据所述个人、动物或物体20距电缆10的距离d及其表面积和/或高度的最小电容变化和最大电容变化。
[0247]
在图17的示例中,针对个人、动物或物体20的不同表面积s
min
、s
max
、s
mean
执行了三次获取,从而能够定义电容变化的下限c
min
和/或电容变化的上限c
max
。实际上,人20的表面积引起线缆10的电容变化,该电容变化可能根据个人的姿势而改变,例如,如图18所示,个人的姿势为其手臂伸出、沿着身体或远离身体。也可以针对相同类型的个人、动物或物体20(例如人),其中个人、动物或物体具有不同的表面积(例如不同高度或不同胖瘦的至少两个人),来执行多次获取。
[0248]
当检测到在最小限值c
min
和最大限值c
max
之间(包括c
min
和c
max
)的电容变化时,有利地,触发预定动作,该动作特别地选自:生成视觉、声音或触觉警报、停止线缆和/或由线缆驱动的元件的移动、禁止启动和/或重启。优选地,检测到大于最大变化限值c
max
的电容变化触发自动停止线缆的移动。
[0249]
电容变化还可以由相对灵敏度限定,相对灵敏度取决于导电线缆部分的长度l,例如通过τ=c
ind,ani,obj
(d)/c
self
(d,l)限定。因此,对于线缆长度l,如果检测到大于或等于τ的电容变化,则可以触发动作。
[0250]
电场
[0251]
图4中的曲线一方面表示由导电线缆部分发射的电场的强度随到线缆的距离的变化,另一方面表示转换成电压的场强。对于固定的线缆长度,所发射的电场的强度可以由以下公式定义:
[0252]
[数学式13]
[0253][0254]
其中,σ为导电部分的表面密度。
[0255]
该电场到电压的转换由以下公式定义:
[0256]
[数学式14]
[0257][0258]
电场强度尤其取决于线缆的导电部分上的预定电位v。通过改变预定电位v可以增大或减小线缆的环境变化的检测范围。
[0259]
导电线缆部分相当于具有屏蔽发射线缆的导线天线,也就是说,电流的均方根值
在相关线缆部分的端部处减小并达到零值之前,在相关线缆部分的整个长度上基本上恒定。
[0260]
线缆结构
[0261]
图9a、图9b、图9c、图9d、图9e、图9f、图9g、图9h、图9i、图9j、图9k、图9l、图9m、图9n、图9o、图9p表示根据本发明的牵引或升降线缆的各种可能结构。这些线缆发射如图9a-图9d所示的径向电场e。
[0262]
根据本发明的牵引或升降线缆优选被配置成支持至少100dan且优选高达800dan的牵引力。根据本发明的牵引或升降线缆优选被配置成承受至少100kgf的力且优选高达800kgf的力。
[0263]
线缆优选被配置成仅当移动大于或等于1000dan的负载时断裂。线缆优选被配置成仅当所述力大于或等于1000kgf时断裂。
[0264]
线缆可以被配置成使得其具有至少为2的安全裕度,也就是说,使得线缆在其常规使用期间所承受的负载与导致线缆断裂的负载之间的比率至少为2。
[0265]
线缆可以被配置成使得其可以绕滚筒缠绕,该滚筒具有例如约20cm的直径。
[0266]
线缆可以具有直接施加在其上的预定电位,导电线缆部分于是即为整个线缆。
[0267]
图9a表示如下类型的线缆,该线缆包括绝缘护套12和屏蔽物13,发射通过线缆与电压发生器的直接连接产生的电场e,如在图2的示例中所示意性地示出的。
[0268]
绝缘护套12可以是聚氨酯护套。
[0269]
图9b、图9c和图9d表示至少包括芯部15和至少一个导电屏蔽物13的线缆,芯部15用于经受牵引力,导电屏蔽物13与芯部电绝缘,特别是通过绝缘体14与芯部电绝缘。
[0270]
图9d中所示的线缆相对于图9b中的线缆的优势在于,其在这两种线缆升高到相同的电位v时能够产生更大的电容检测范围。通过减小或增大屏蔽物13在线缆中占据的面积可以有利地增大或减小电容检测范围。
[0271]
电导体的自电容优选地小于150pf、更好地小于110pf。电导体的自电容越低,提高电容检测的灵敏度以及增大电容检测距离的可能性越大。
[0272]
如图9b至图9j所示,线缆有利地包括在屏蔽物13外部的绝缘体12。
[0273]
线缆可以包括至少一个升高到预定电位的电导体16。优选地,线缆包括至少两个分别升高到预定电位的电导体。这两个电导体可以在线缆的同一部分上延伸或者可以在线缆的两个不同部分上延伸。
[0274]
图9i和图9j表示包括两个圆形截面的具有护套的芯部15a、15b或者两个半圆形截面的具有护套的芯部15a’、15b’的线缆。所述芯部可以呈螺旋状缠绕。两个芯部的组合可以被绝缘体12覆盖。至少两个芯部的存在能够提供安全性冗余。该绝缘涂层12中可以包括至少一个电导体16。
[0275]
图9e、图9f、图9g和图9h表示包括至少一个芯部15和绝缘体12的线缆,芯部15可以经受牵引力或升降力,绝缘体12围绕该芯部。至少一个电导体16被埋在绝缘体12中。
[0276]
图9e表示可以经受牵引力或升降力的线缆,该线缆包括芯部15,芯部15例如由钢制成且被绝缘体12覆盖,绝缘体12能够支撑线缆正常经受的机械力,绝缘体12例如由橡胶制成。在该示例中,埋在绝缘体中的两条电线16沿芯部呈螺旋状缠绕。每条电线可以连接到电容检测系统。
[0277]
图9g表示包括埋在绝缘体12中的两个带状电导体16的线缆。这些电导体16可以如图9g所示那样以同心方式设置。这两个电导体16可以在直径上相对。图9h表示也包括两个带状电导体16和绝缘体12的线缆。绝缘体12可以由被两个电导体分开的两个不同的壳体形成,这两个电导体从芯部15径向延伸直到绝缘体12的外表面。
[0278]
图9g中的线缆能够通过位于芯部15中的至少一条导线17发射模拟或数字信号。导线17优选地由绝缘体覆盖。该导线可以是铜线(例如,成股的铜线),优选地具有大约0.2mm的直径,优选地由绝缘体覆盖。该绝缘体可以是护套,具有例如大约0.3mm的厚度。替选地,该导线为由绝缘护套覆盖的光纤。
[0279]
根据本发明的线缆的芯部可以用于向固定到线缆的负载11供应电能(中等电压、单相或三相电流)。还可以向固定到线缆的负载11供应低电压的电力。
[0280]
图9f表示能够使固定到线缆的负载11被供应电能的线缆结构。该线缆包括彼此绝缘的三个芯部15a、15b、15c,这三个芯部分别提供带电导体、中性导体和保护导体。这三个芯部15a、15b、15c的横截面的形状优选为由接地屏障18围绕的相同的有角扇形,该接地屏障18由绝缘体围绕,该绝缘体本身由升高到线缆的电位的屏障19围绕,该屏障19由绝缘体覆盖。于是,埋在绝缘体12中的电线能够免受由通过芯部15b和15c向负载11供应电能引起的电气影响。
[0281]
根据本发明的线缆可以包括一组股线,每根股线由一组导线组成,这些导线例如为镀锌钢丝,如图9k至图9n的示例中所示。该线缆包括例如6根或7根股线,每根股线包括7根至19根导线,该线缆具有在4mm和8mm之间(包括4mm和8mm)的直径dc。该线缆优选由绝缘体12围绕,该绝缘体的厚度例如在1mm和2mm之间(包括1mm和2mm)。
[0282]
在图9k至图9n的示例中,线缆包括7根股线,每根股线包括7根导线。
[0283]
在图9k的示例中,每根线缆股线的每个导线升高到预定可变电位并且经受交流电压。这种线缆能够具有高的安全性冗余。
[0284]
在图9l的示例中,成股的电导体16位于线缆股线周围,该电导体16的股线优选以螺旋状方式绕线缆股线交错,其间距取决于股线的缠绕间距。电导体16的一根股线的直径db可以为约0.3mm。
[0285]
在图9m的示例中,线缆包括位于股线周围的两个成股的电导体16,从而能够具有安全性冗余。
[0286]
股线优选由绝缘体围绕。
[0287]
每根股线可以处于预定电位并因此形成检测电导体。
[0288]
替选地,多根股线可以组合以形成电导体。因此,如图9n所示,线缆包括两个电导体,每个电导体由三根股线形成。股线的其他组合也是可能的,例如三根相邻股线的组。在图9k至图9n的线缆示例中,股线之一可以由成股的导电铜线组成,以能够向负载11供应电力。
[0289]
图9o和图9p表示这种线缆的变型。
[0290]
在图9o中,中心股线为由第一接地屏蔽物围绕的成股的铜线,该第一接地屏蔽物本身由升高到其他股线的电位的屏障围绕。
[0291]
替选地,接地屏蔽物可以由位于连接到电导体的信号调节器的输出端的带阻滤波器替代,例如对于以50hz通过电导体的电流该带阻滤波器的频率处于50hz。
[0292]
当线缆包括至少一个与股线和构成股线的导线不同的检测电导体时,如图9l和图9m的示例中所示,成股的电源铜线可以由接地的单个屏蔽物围绕,并且股线可以升高到电导体的电位。一个这样的示例在图9p中示出。
[0293]
一般来讲,线缆可以包括用于经受牵引力的至少一个芯部、不同于芯部的检测电导体、和信号传输电导体,该传输电导体由接地屏蔽物围绕,芯部位于屏蔽物周围且处于检测电导体的电位,检测电导体位于芯部周围,并且绝缘体围绕检测电导体。
[0294]
在优选实施方式中,线缆包括用于电容检测的至少两个电导体以及用于供电给负载11的至少一条电线,该电线由接地屏蔽物围绕,该接地屏蔽物本身由升高到电导体的电位的屏障围绕,电导体位于所述屏障周围。
[0295]
上述线缆结构能够实现检测线缆附近的个人、动物或物体。然而,这些线缆结构不能实现沿导电线缆部分定位个人、动物或物体。为了能够沿线缆、优选在线缆的整个长度上定位个人、动物或物体,用于电容检测的多个敏感元件可以定位在线缆部分上、例如连续的线缆部分上,优选地由绝缘体分开。这种线缆结构的示例在图11中示出。
[0296]
敏感元件61a、61b、61c沿线缆被划分,通过隔离元件62a、62b彼此隔离。每个敏感元件连接到能够检测个人、动物或物体的靠近的检测系统的模块65。在对来自各个检测模块65的信息进行分组并通过例如处理器处理该信息之后,可以定义个人、动物、物体沿线缆的位置。连接到检测模块65的调节电路可以被复用,以区分沿线缆的各个敏感元件。
[0297]
图12是能够跟随如图9e所示的线缆的两个电导体16a和16b的电容变化的电子电路的示例。特别地,该电子电路包括连接到电导体的电气调节器,该电气调节器将电导体的电容转换为电压。至少两个电导体16a和16b的存在能够实现个人、动物或物体的检测的安全性冗余。线缆有利地被配置成响应故障。这两个电导体可以产生相同的电场。然后,在不存在个人、动物或物体时,这两个电导体16a和16b发送相同的信息。在由两个电导体发送的信息不同的情况下,可以生成警报信号和/或可以应用关机或维护措施。不同的信息可以由以下情况引起:存在个人、动物或物体,对电导体的损坏,故障或任何其他妨碍电导体中的至少一个电导体检测线缆的环境变化的事故。
[0298]
在正常操作且不存在个人、动物或物体时,电导体优选总是发送相同的信息。
[0299]
通过比较由电导体发送的信息与由至少一个参考电导体发送的信息和/或预定参考数据,可以确定损坏的电导体、故障或任何其他妨碍电导体中的至少一个电导体检测线缆的环境变化的事故。
[0300]
例如,在图12的电子电路中,r1=1kω且r2=10kω。于是,对于等于100khz的频率,i《1ma,峰到峰电压等于100v。该电流在与人接触时没有危险。
[0301]
该电子电路可以包括高通滤波器,用于过滤特别是50hz的干线。电导体16a和16b可以免受例如由线缆的芯部向负载11供应电力引起的电气影响。
[0302]
每条线缆优选连接到信号调节器。每条线缆可以通过bayonet neill-concelman(bnc)插头连接到信号调节器。因此,根据本发明的装置优选包括至少与线缆数量相同数量的信号调节器。如图19和图20所示,绝缘体可以覆盖任何线缆引导、驱动和/或缠绕系统。
[0303]
在图19中,示出了被绝缘体82覆盖的缠绕滚筒72。
[0304]
在图20中,示出了被绝缘体82覆盖的滑轮71。滑轮71可以完全由绝缘材料制成。替选地,滑轮71可以由被绝缘材料82覆盖的金属制成;该金属可以升高到线缆的电位v或者由
升高到线缆的电位v的屏障41进行整流,线缆优选由绝缘体覆盖。
[0305]
如图23所示,线缆10还可以包括能够监测线缆的功能的至少一个元件91,例如当线缆用在升降或牵引设备或边界设备中时监测线缆的功能。特别地,该元件优选为围绕线缆的金属环。特别地,该元件可以由位于线缆引导、驱动和/或缠绕系统的入口处或在线缆附近的机电或电感传感器检测。该元件91还可以是固定到线缆的rfid标签,位于线缆引导、驱动和/或缠绕系统的入口处或在线缆附近的传感器则为rfid读取器。
[0306]
图21表示根据本发明的安全栅装置的示例,该安全栅装置包括在两个支撑结构32之间延伸的线缆10。这种类型的结构被配置成检测环境变化,特别是如果个人20靠近由线缆10形成的安全栅(如图22b所示),或者如果个人20跨越由线缆10形成的安全栅,该个人例如在线缆之下通过(如图22a所示)或者在线缆之上通过。
[0307]
有利地,在线缆的静态环境中考虑支撑结构32的电容影响。
[0308]
用于缠绕线缆10的系统31可以被定位在至少一个支撑结构32中,该系统优选由保护系统40围绕。
[0309]
图13是表示本发明的方法的实施方式的示意框图。发生器向位于机器人、升降和/或牵引机器或安全栅的一条或多条线缆上的一个或多个电容传感器供应电力。
[0310]
处理系统可以包括处理器(特别是微控制器)和数据分析器,特别是分析流过线缆的电流的变化,特别是通过将所测量的电压、电流或电容与参考数据进行比较,从而能够确定是否存在个人、动物或物体,更好地能够定位个人、动物或物体,更好地能够沿至少一条线缆定位个人、动物或物体,甚至更好地能够估计个人、动物或物体距线缆的距离。此外,警报系统连接到处理系统。警报系统可以是声音系统和/或视觉系统。处理系统同样可以连接到机器人的控制界面,紧急措施可编程在所述处理系统上,特别是紧急停止或轨迹修改。
[0311]
图25表示根据本发明的装置的示例的示意框图,该装置包括:分别包括两个电导体161和162的两条线缆,两个电导体161和162被配置成用于绕线缆101和102对各个电容c1和c2进行电容检测;以及也包括两个电导体16
1ref
和16
2ref
的参考线缆,该参考线缆被定位在不会被任何可能的障碍物干扰的位置。优选地,参考线缆始终处于相同的线缆101和102的环境条件下,例如相同的环境相对湿度下。每条线缆可以连接到信号调节器,并且如图29所示,每条线缆101、102优选连接到至少两个信号调节器,从而能够确保安全性冗余。
[0312]
在图25的示例中,信号调节器例如类似于图26或图28中的信号调节器。
[0313]
图26中所示的示例信号调节器连接到包括两个电导体161和162的线缆。相同的电压v
gbf
被施加到信号调节器(运算放大器)的两个输入端。于是,输出电压vs与电导体的电容c
161
(l,t)和c
162
(l,t)之间的差值成比例。如果电导体的电容c
161
(l,t)和c
162
(l,t)相等,则在线缆附近没有障碍物的情况下,vs等于0。信号调节器还可以包括至少一个电容器cond,从而能够固定信号调节器的操作点并调整输出电压vs。
[0314]
信号调节器优选包括印刷电路,该印刷电路的电容小于4pf、甚至更好地小于3pf。
[0315]
信号调节器的电容取决于线缆的电导体的电容以及信号调节器的印刷电路的电容。优选使用相对湿度传感器,该相对湿度传感器优选周期性地、例如以一分钟间隔获取相对湿度的值。然后可以估计电导体的每单位长度的电容系数:
[0316]
[数学式15]
[0317][0318]
其中,ε
air-rh%
为随相对湿度变化的空气介电常数,ε0为真空介电常数,d
∞
为针对c(d
∞
)≈0的距离,以及ri为电导体的半径,i∈[1,2],在该特定示例中,线缆包括两个电导体。
[0319]
此外,电导体可能互相影响。如果电导体升高到相同的可变电位,则电导体相互施加排斥力。因此,可以通过下式来定义电导体的每单位长度的电容系数:
[0320]
[数学式16]
[0321][0322]
其中,γ为反映电导体之间的排斥力的正系数。每单位长度的电容的减小能够提高线缆的电容灵敏度。
[0323]
最后,诸如线缆周围的墙壁、地面、静态元件之类的外部环境也可能影响电导体的电容。所有这些相互作用可以如下转换:
[0324]
[数学式17]
[0325][0326]
其中,m是指线缆的空间位置,k
i ext env
×di
对应于作为外部环境的一部分的元件对线缆的影响,该元件与线缆分开距离di。
[0327]
然后,可以从以上推导出信号调节器的电容:
[0328]
[数学式18]
[0329][0330]
其中,c
pr circuit
为调节器的印刷电路的电容以及cond为用于固定信号调节器的操作点的电容器的电容。
[0331]
在图25的示例中,优选地,调节器分别包括电容器ca
ctl
、ca
1 ctl
、ca
2 ctl
,用于固定所述调节器的操作点以及调整所述调节器的输出电压。
[0332]
一般来讲,信号调节器优选被配置成,使得其具有高的电压响应稳定性,例如为了检测处于30cm处的障碍物而传送的电压随时间的漂移小于3%;和/或使得其能够检测处于小于或等于30cm处的人,对于小于或等于30cm的距离,电导体的电容变化小于1%;和/或使得信号调节器的响应时间为大约几微秒,优选小于50微秒。
[0333]
根据本发明的装置可以包括测量导电线缆部分的长度l的至少一个编码器c和/或相对湿度传感器h和/或连接到参考调节器的至少一个参考线缆,参考线缆被定位在不会被任何障碍物干扰的位置,并且优选始终与线缆101和102处于相同的环境条件下,例如相同的环境相对湿度下。优选地,该装置每条线缆101、102包括一个编码器,每个编码器测量与其连接的线缆的导电线缆部分的长度l
101
、l
102
。
[0334]
该编码器可以是绝对类型或递增类型。
[0335]
该编码器优选是绝对型编码器。在递增型编码器的情况下,在本发明的包括如图
23所示的元件91的变型中采用递增型编码器,元件91能够监测线缆的功能,元件91例如为环或rfid标签。
[0336]
湿度传感器h和/或参考线缆使得可以测量相对湿度、验证和/或校正电容检测的漂移,以及具有能够实现例如电压比较和/或校正装置的功能的参考值。
[0337]
在图25的示例中,特别地,装置包括测量导电线缆部分的长度l
101
、l
102
的两个编码器c、相对湿度传感器h以及连接到参考调节器的参考线缆。
[0338]
一般来讲,该装置包括连接到至少一个参考调节器的至少一条参考线缆。
[0339]
每个编码器c优选被配置成符合安全性标准,例如nf en iso 13849-1标准和/或iec 61508,优选至少分别覆盖低性能等级pla和/或低安全完整性等级sil1,更好地分别覆盖高性能等级pld或ple和/或高安全完整性等级sil2或sil3。
[0340]
相对湿度传感器优选被配置成符合安全性标准,例如nf en iso 13849-1标准和/或iec 61508标准,优选至少分别覆盖低性能等级pla和/或低安全完整性等级sil1,更好地分别覆盖高性能等级pld或ple和/或高安全完整性等级sil2或sil3。
[0341]
如图25所示,根据本发明的装置优选包括安全控制单元,该安全控制单元可以连接到一个或多个输出继电器和/或总线。如果已经在装置的至少一条线缆附近检测到障碍物,则可以触发输出继电器或总线。
[0342]
图25的装置包括两个输出继电器r1和r2。输出继电器可以被连接以控制致动器,该致动器被配置成在检测到障碍物的靠近时引起至少一个预定动作。输出继电器可以被配置成作用于线缆的移动,特别地,能够在检测到障碍物时停止移动。这些输出继电器优选符合安全性标准,例如en iso 13849-2标准。
[0343]
替代输出继电器,或除输出继电器之外,安全控制单元连接到安全总线,优选被配置成符合安全性标准,例如iso 13849-1标准和/或iec 61508标准,优选至少分别覆盖高性能等级ple和/或高安全完整性等级sil3。
[0344]
安全控制单元测量参考调节器的输出端处的电压v
ref
、调节器1的输出端处的电压v1、以及调节器2的输出端处的电压v2,电压v
ref
取决于参考线缆,电压v1取决于线缆101以及电压v2取决于线缆102。
[0345]
参考线缆可以具有与线缆101和线缆102中的至少一者相同的特性。参考线缆具有固定长度l
ref
,优选为1m、2m或大于2m。参考线缆的长度l
ref
优选基本上等于线缆101和线缆102中执行特定移动的至少一条线缆的导电线缆部分的平均长度l
101
、l
102
。
[0346]
有利地,参考线缆的固定长度l
ref
在一方面来自线缆101、102的导电部分的最小值中的最小长度值和另一方面来自线缆101、102的导电部分的最大值的最大长度值之间(包括该最小长度值和最大长度值)。
[0347]
安全控制单元可以将所测量的电压与检测阈值进行比较,该检测阈值优选取决于线缆101和/或线缆102的长度l、更优选地取决于导电线缆部分的长度l。如果电压v1和电压v2中的至少一者大于或等于检测阈值,则可以触发输出继电器r1和r2中的至少一者,更好地是可以触发两个继电器。可以通过由安全控制单元的逻辑单元机械引导的接触来触发输出继电器,继电器优选采用正逻辑。
[0348]
控制单元能够检测包括至少一个导电线缆部分的线缆的电压变化中的至少一者、优选全部。变化可以与人的指纹进行比较,该指纹预先确定。例如,针对具有约10m的解绕长
度l、包括两个电导体的线缆,人的指纹可以如下检测:当人位于距线缆50cm处时,δv为大约24mv;当人位于距线缆40cm处时,δv为大约30mv;当人位于距线缆30cm处时,δv为大约42mv;当人位于距线缆20cm处时,δv为大约60mv;以及当人位于距线缆10cm处时,δv为大约93mv。
[0349]
优选地,安全控制单元计算调整后的电压v
1 adjusted
和v
2 adjusted
。这些电压v1和v2的调整优选地取决于周边环境的相对湿度。于是,电压值v
1 adjusted
和v
2 adjusted
取决于由相对湿度传感器h执行的测量。替选地和/或附加地,相对于参考电导体计算电压值v
1 adjusted
和v
2 adjusted
,例如v
1 adjusted
=v1±vref
和v
2 adjusted
=v2±vref
。
[0350]
调整后的电压可以取决于环境相对湿度和/或预先确定的电压变化,例如通过确定指纹和/或导电线缆长度和/或参考线缆而预先确定的电压变化。
[0351]
调整后的电压可以与检测阈值进行比较。如果调整后的电压中的至少一者大于或等于检测阈值,则触发输出继电器r1和r2中的至少一者、更好地两者。
[0352]
替选地和/或附加地,如果电压v1、v2、v
1 adjusted
和/或v
2 adjusted
小于或等于预定值和/或大于或等于预定值,则可以触发输出继电器r1和r2。
[0353]
如果电压v1与电压v2之间的差值超过预定值和/或如果电压v
1 adjusted
与电压v
2 adjusted
之间的差值超过预定值,则可以触发输出继电器r1和r2中的至少一者。实际上,在线缆101、102附近不存在障碍物时,电压v1和电压v2优选基本上相等。该预定值可以取决于障碍物与线缆分开的预定距离。
[0354]
有利地,安全控制单元具有冗余架构。优选地,安全控制单元被配置成具有为1的hft故障容差。有利地,安全控制单元被配置成符合安全性标准,例如nf en iso 13849-1标准和/或iec 61508标准,优选至少分别覆盖低性能等级pla和/或低安全完整性等级sil1,更好地分别覆盖高性能等级pld或ple和/或高安全完整性等级sil2或sil3。
[0355]
图29表示根据本发明的装置的另一示例的示意框图,其中,两条线缆中的每一条线缆都连接到相应的信号调节器,线缆101和102的电导体161和162连接到与所述线缆连接的两个调节器中的每一者。
[0356]
图27表示包括两个独立且相同的通道35a和35b的实施方式,通道35a和35b分别包括连接到线缆101、102的调节器。
[0357]
两个通道35a和35b可以按顺序发挥作用。
[0358]
每个调节器包括能够将电力供应给运算放大器356和357的连接器354,该连接器传递例如+/-45v的电源电压。连接器354还可以控制开关351、352、353。有利地,开关353能够使线缆的一部分、例如线缆的屏蔽物升高到电导体的电位。特别地,在线缆用于向负载供电和/或用于信号传输时,这可以防止干扰。
[0359]
具有两个同步输出通道的发生器优选传递两个通道的输入信号v
gbf1
和v
gbf2
。
[0360]
优选地,法拉第屏障围绕两个调节器中的每一者,从而防止任何电容耦合。发生器gbf1和gbf2不需要被该屏障围绕。优选地,至少一个振荡器传递输入信号。振荡器可以被法拉第屏障围绕。振荡器可以具有约10khz的频率。法拉第屏障可以是包括导电内壁和与内壁电绝缘的外壁的盒子,该导电内壁通过电压跟随器放大器357升高到电导体的预定可变电位。发生器可以通过bnc插头连接到该屏障。
[0361]
bnc插头和屏蔽线缆可以用于将每条线缆101、102连接到其信号调节器,屏蔽线缆
的芯部将信号调节器连接到线缆,并且屏蔽物例如通过连接到电压跟随器放大器357来升高到线缆101、102的电导体的预定可变电位。
[0362]
信号调节器的支撑部件的印刷电路可以固定到法拉第屏障。该印刷电路可以优选地不固定到该屏障,从而能够在必要时、例如在一个部件有缺陷时容易地更换部件。
[0363]
运算放大器例如为aop 445。这些运算放大器可以被定位在14针dip(直立式,tulip)插座上。这些运算放大器可以设置有修整器(例如为100kω),以调整偏移电压。正负电源插针可以分别包括用于稳定电源电压的电容器,例如正负电源插针分别包括10nf的电容器。
[0364]
开关可以是模拟开关,例如为max14756或dg411开关。这些开关可以安装在16针dip(直立式)插座上。
[0365]
如图27所示的信号调节器特别适用于根据本发明的线缆,特别是图9n所示的线缆或图9p所示的线缆。优选地,通过安全控制单元定期、例如周期性地和/或每当重启装置时执行能够验证装置的正确运行的校验。优选地,该校验包括将电压v1和电压v2中的至少一者与预定值进行比较。该预定值取决于例如c
a ctl
。优选地,周期性地和/或每当重启装置时执行对信号调节器的运行的至少一次校验。
[0366]
例如,当开关351和352断开,则调节器不再与线缆的电导体接触时,将输出电压vs与参考值v
s ref
进行比较。
[0367]
替选地和/或附加地,如图28所示,信号调节器包括至少两个控制开关359,每个控制开关359与控制电容器358串联,控制电容器接地,控制开关中的一者连接到运算放大器的正电源插针,控制开关中的另一者连接到运算放大器的负电源插针。当开关351和352断开且控制开关359闭合时,则可以将在运算放大器的输出端处测量的输出电压vs与一值进行比较,该值预先已知并且取决于控制单元的参数和信号调节器的部件的参数。
[0368]
如果检测到故障,则实施至少一种防护措施,例如紧急停止装置和/或不重启装置。
[0369]
当线缆连接到多个调节器时,可以在对调节器的运行进行校验期间比较在各个调节器的运算放大器的输出端处测量的输出电压vs。
[0370]
替选地和/或附加地,可以将在运算放大器的输出端处测量的输出电压vs与来自连接到参考线缆的参考调节器的电压v
s ref
进行比较。
[0371]
当然,本发明不限于已经描述的实施方式。
[0372]
特别地,可以测量和/或存储其他信息,例如线缆相对于个人、动物或物体的相对速度或者检测出错率。处理系统可以被配置成传输想要在例如控制界面或警报系统上显示的信息。
[0373]
其他传感器、例如尤其是使用图像识别方法的视觉传感器可以向处理系统提供补充信息,从而可以指定个人、动物或物体的性质或其位置。处理系统可以通过分析来自线缆的控制系统和/或来自各种传感器、特别是电容和/或光学传感器的信息,来确定个人、动物或物体是在靠近一条或多条线缆还是在远离一条或多条线缆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1