机器人控制装置的制作方法
本发明涉及机器人控制装置。
背景技术:
1、以往,已知一种多关节的机器人的控制方法:通过使多个关节协作进行动作,从而使机器人的预定的部位沿着预定的连续轨道移动(例如,参照专利文献1~4。)。例如,示教第一位置以及第二位置,并且控制多个关节以使像tcp(tool center point)那样的控制点在从第一位置开始至第二位置为止的直线轨道上直线移动。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2018-111155号公报
5、专利文献2:国际公开第2016/135861号
6、专利文献3:国际公开第2017/002208号
7、专利文献4:日本特开2015-066668号公报
技术实现思路
1、发明要解决的问题
2、在沿着连续轨道进行动作时,有时机器人的姿态靠近奇异点,并且至少一个关节急剧动作。在这种情况下,机器人控制装置判定发生错误,并且采取停止机器人的动作等措施。因此,在每次发生错误时,需要重新示教其他轨道来重新使机器人进行动作等追加的作业。
3、用于解决问题的方案
4、本发明的一个方案是一种机器人控制装置,其控制多关节的机器人,所述机器人具有:多个基本关节,其使手腕部的位置发生变化;以及多个手腕关节,其使设定于所述手腕部或者与该手腕部连接的末端执行器的控制点的位置以及姿态发生变化,所述机器人控制装置具备:控制部,其通过控制所述多个基本关节以及所述多个手腕关节,使所述控制点从第一位置移动到第二位置;以及位置信息记录部,其记录位置信息,所述位置信息包括所述第二位置的位置、以及在所述控制点位于所述第二位置时的所述多个手腕关节的各自的旋转角度,在所述控制点位于所述第二位置时的所述手腕部的姿态不是奇异点的情况下,所述控制部通过使所述多个基本关节以及所述多个手腕关节相互协作进行直线动作,从而使所述控制点直线移动到所述第二位置,在所述控制点位于所述第二位置时的所述手腕部的姿态是奇异点的情况下,所述控制部通过使所述多个手腕关节进行各轴动作而不相互协作,从而使所述控制点移动到所述第二位置。
技术特征:
1.一种机器人控制装置,其控制多关节的机器人,所述机器人具有:多个基本关节,其使手腕部的位置发生变化;以及多个手腕关节,其使设定于所述手腕部或者与该手腕部连接的末端执行器的控制点的位置以及姿态发生变化,其中,
2.根据权利要求1所述的机器人控制装置,其中,
3.根据权利要求1或2所述的机器人控制装置,其中,
技术总结
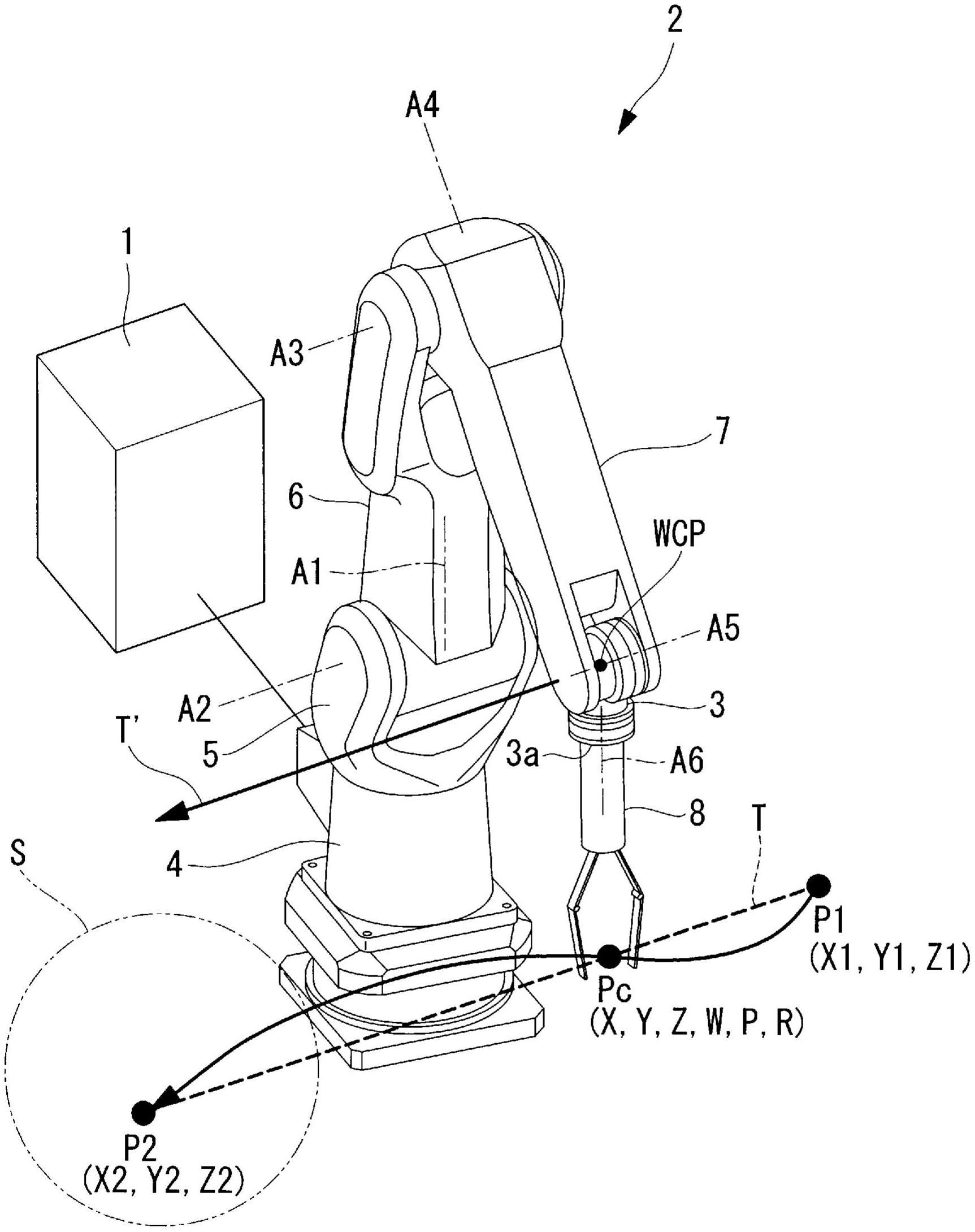
机器人控制装置(1)具备:控制部,其通过控制多个基本关节以及多个手腕关节,使控制点(Pc)从第一位置(P1)移动到第二位置(P2);以及位置信息记录部,其记录位置信息,所述位置信息包括第二位置(P2)的位置、以及在控制点(Pc)位于第二位置(P2)时的多个手腕关节的各自的旋转角度,在控制点(Pc)位于第二位置(P2)时的手腕部(3)的姿态不是奇异点的情况下,控制部通过使多个基本关节以及多个手腕关节相互协作进行直线动作,从而使控制点(Pc)直线移动到第二位置(P2),在控制点(Pc)位于第二位置(P2)时的手腕部(3)的姿态是奇异点的情况下,控制部通过使多个手腕关节进行各轴动作而不相互协作,从而使控制点(Pc)移动到第二位置(P2)。
技术研发人员:王悦来,内藤康広
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!