信息处理装置以及信息处理方法与流程
本发明涉及信息处理装置以及信息处理方法。
背景技术:
1、为了检测物体(以下,也称为“工件”)的取出位置,进行使用了由3维测量部测量出的工件的距离图像的示教。作为用于进行使用了距离图像的示教的方法,例如一般利用基于cad(computer-aided design:计算机辅助设计)匹配的方法、根据设定参数进行搜索的方法。在此,距离图像是对测量对象物(工件)的表面进行了测量而得的图像,是指拍摄到的图像上的各像素(pixel)具有来自3维测量部的深度信息的图像。即,可以说距离图像上的各像素(pixel)具有3维测量部具有的3维坐标系中的3维坐标信息。
2、关于这一点,已知有如下技术:以多个角度拍摄物体的距离图像,根据拍摄到的多个距离图像来生成物体的三维模型,并且根据生成的三维模型来生成表示与多个角度对应的物体的特定部位的提取图像,将多个距离图像和与多个距离图像分别对应的提取图像用作监督数据来进行机器学习,由此,生成确定机器人把持物体的位置的模型。例如,参照专利文献1。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2019-56966号公报
技术实现思路
1、发明要解决的课题
2、但是,为了生成确定工件的取出位置的模型,需要以多个角度拍摄物体的距离图像,花费劳力和时间。
3、另外,在多个工件散装的情况下,为了确定散装的工件的取出位置,也需要考虑保持对象工件时的机械手的位置以及姿势,以便在该位置保持工件时避免机械手与周围的工件、容器壁等障碍物的干扰。
4、因此,期望容易地生成确定散装的工件的取出位置的学习模型的生成所需的学习数据(也称为“监督数据”或“训练数据”)。
5、用于解决课题的手段
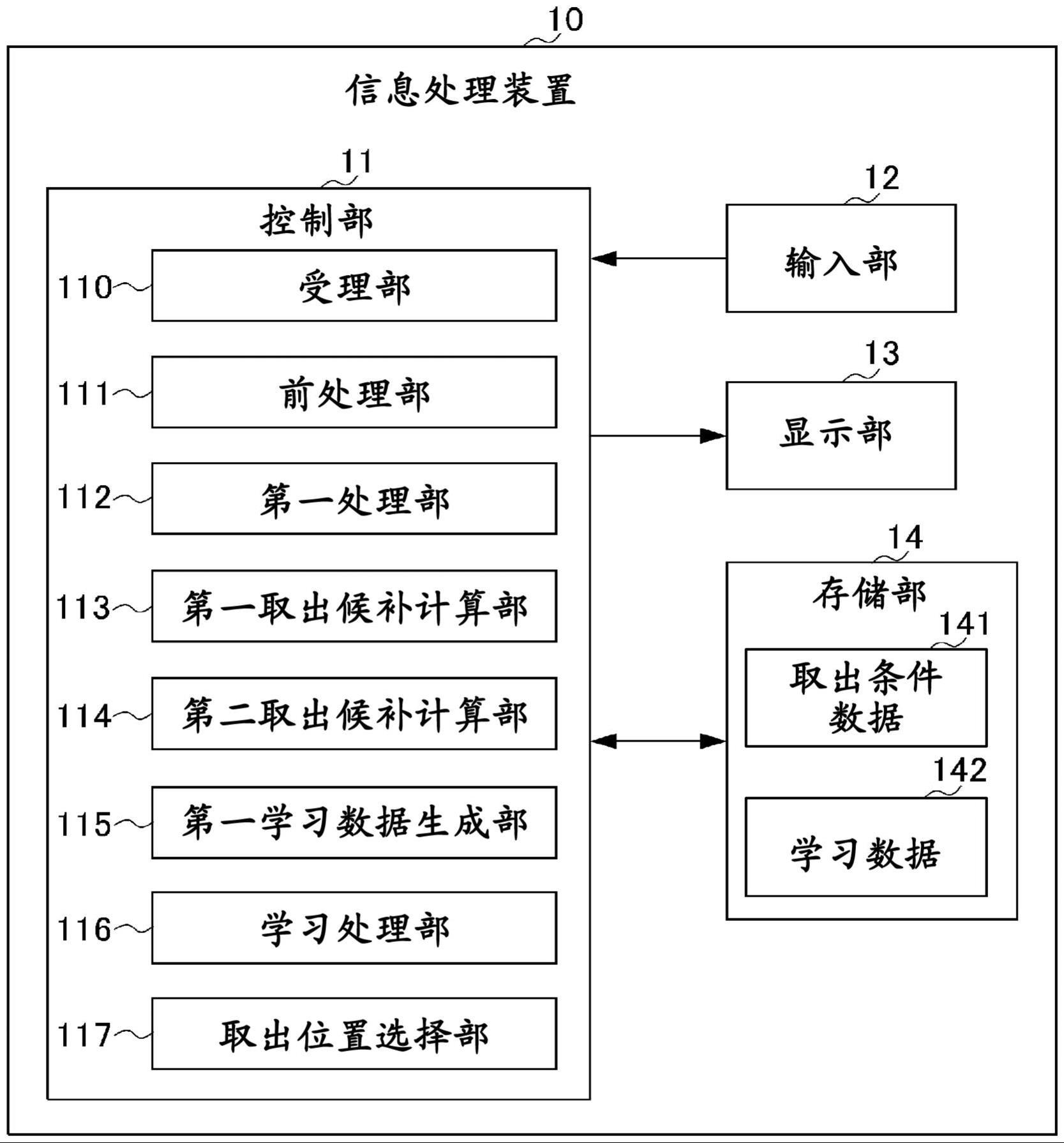
6、(1)本公开的信息处理装置的一方式是对使用机械手取出工件的信息进行处理的信息处理装置,其中,该信息处理装置具有:受理部,其受理包含所述机械手或所述工件的信息的取出条件;前处理部,其根据所述工件的3dcad模型,至少导出所述工件的重心位置;以及第一处理部,其根据导出的所述工件的重心位置,导出与所述取出条件对应的所述工件的所述3d cad模型的局部特征。
7、(2)本公开的信息处理方法的一方式是由计算机实现的、对用于使用机械手取出工件的信息进行处理的信息处理方法,其中,该信息处理方法具有:受理工序,受理包含所述机械手或所述工件的信息的取出条件;前处理工序,根据所述工件的3d cad模型,至少导出所述工件的重心位置;以及第一处理工序,根据导出的所述工件的重心位置,导出与所述取出条件对应的所述工件的所述3d cad模型的局部特征。
8、发明效果
9、根据一方式,能够容易地生成确定散装的工件的取出位置的学习模型的生成所需的学习数据(“监督数据”、“训练数据”)。
技术特征:
1.一种信息处理装置,对用于使用机械手取出工件的信息进行处理,其特征在于,
2.根据权利要求1所述的信息处理装置,其特征在于,
3.根据权利要求1或2所述的信息处理装置,其特征在于,
4.根据权利要求3所述的信息处理装置,其特征在于,
5.根据权利要求3或4所述的信息处理装置,其特征在于,
6.根据权利要求3~5中任一项所述的信息处理装置,其特征在于,
7.根据权利要求6所述的信息处理装置,其特征在于,
8.根据权利要求6或7所述的信息处理装置,其特征在于,
9.根据权利要求3~5中任一项所述的信息处理装置,其特征在于,
10.根据权利要求9所述的信息处理装置,其特征在于,
11.根据权利要求10所述的信息处理装置,其特征在于,
12.根据权利要求10或11所述的信息处理装置,其特征在于,
13.根据权利要求3~5中任一项所述的信息处理装置,其特征在于,
14.根据权利要求13所述的信息处理装置,其特征在于,
15.根据权利要求14所述的信息处理装置,其特征在于,
16.根据权利要求14或15所述的信息处理装置,其特征在于,
17.一种由计算机实现的、对用于使用机械手取出工件的信息进行处理的信息处理方法,其特征在于,
技术总结
本发明容易生成对确定散装的工件的取出位置的学习模型的生成所需的学习数据。信息处理装置对使用机械手取出工件的信息进行处理,该信息处理装置具有:受理部,其受理包含所述机械手或所述工件的信息的取出条件;前处理部,其根据所述工件的3D CAD模型,至少导出所述工件的重心位置;以及第一处理部,其根据导出的所述工件的重心位置,导出与所述取出条件对应的所述工件的所述3D CAD模型的局部特征。
技术研发人员:李维佳
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!