机器人系统以及机器人作业方法与流程
本公开涉及机器人系统以及机器人作业方法。
背景技术:
1、以往,已知对能够自主移动的机器人的周围进行拍摄,并且操作者一边观看该拍摄到的图像一边使其移动(例如参照专利文献1)。
2、专利文献1:日本特开2013-031897号公开专利公报
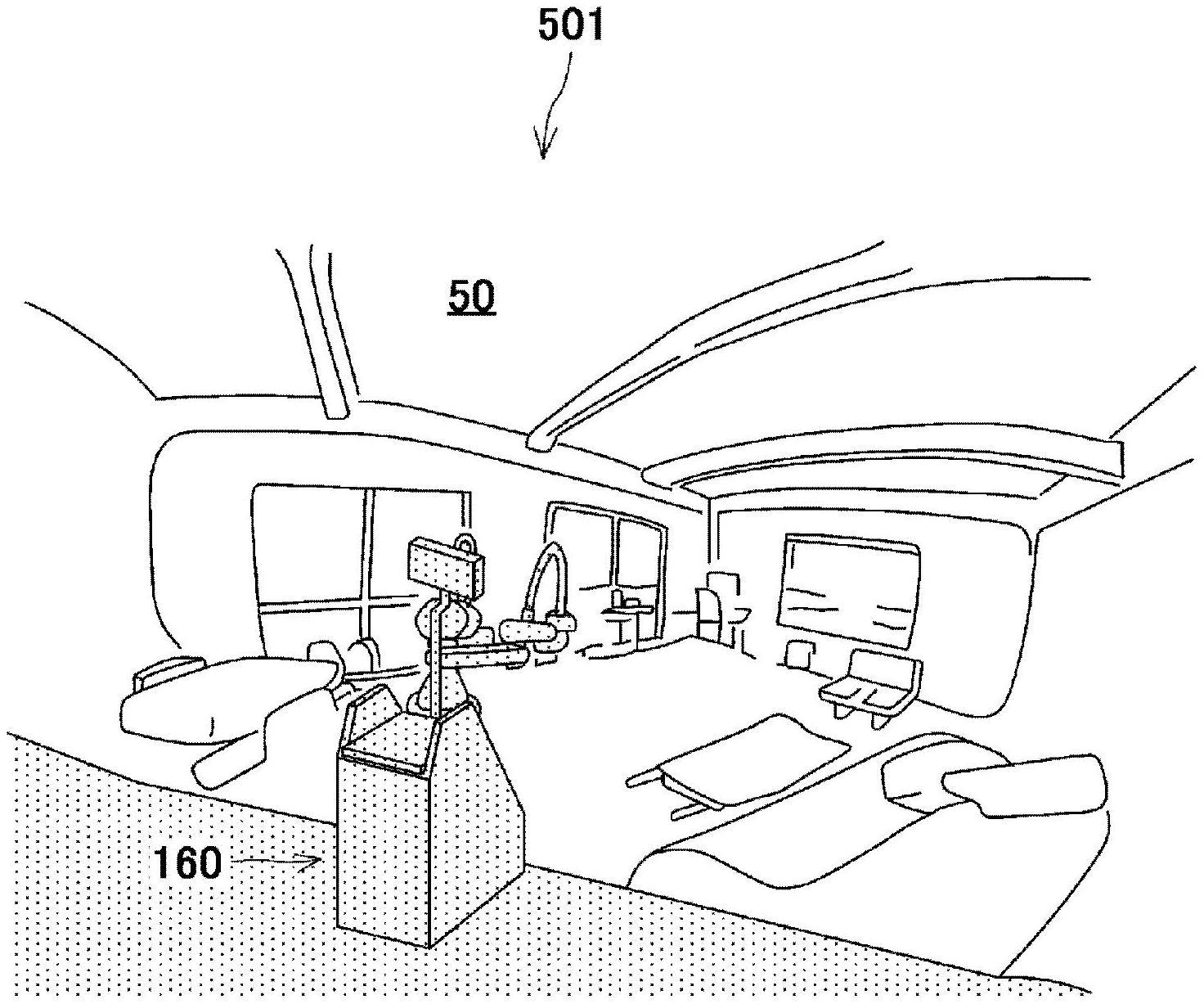
3、在能够自主行走的机器人(以下称为自行走机器人)中,有的具备机器人手臂,在使这样的自行走机器人行走时,机器人手臂容易与周围的物体发生干涉。在上述现有技术中,完全没有提及该问题。
技术实现思路
1、本公开是为了解决上述那样的课题而完成的,其目的在于提供能够避免具备机器人手臂的自行走机器人与周围的物体发生干涉的机器人系统以及机器人作业方法。
2、为了实现上述目的,本公开的一方式(aspect)所涉及的机器人系统具备:自行走机器人,包括具有1个以上的关节的机器人手臂;操作部,受理由操作者进行的操作,用于操作上述自行走机器人;显示器,由上述操作者视觉辨认;周围摄像机,搭载于上述自行走机器人,拍摄该自行走机器人的周围的状况;以及处理电路,上述处理电路构成为,生成对包含上述机器人手臂的姿势在内的上述自行走机器人的姿势时时刻刻进行模拟的自行走机器人模拟图像,并生成包含由上述周围摄像机拍摄到的周围状况图像和生成的上述自行走机器人模拟图像并显示于上述显示器的复合图像。这里,所谓“时时刻刻进行模拟”是用于明确由模拟图像生成部生成自行走机器人模拟图像连续的动画并且该自行走机器人模拟图像为该动画的瞬时图像的语句,除此以外没有特别意义。
3、另外,本公开的其他方式(aspect)所涉及的机器人作业方法包括:操作具备机器人手臂的自行走机器人;生成对包含上述机器人手臂的姿势在内的上述自行走机器人的姿势时时刻刻进行模拟的自行走机器人模拟图像;在上述自行走机器人设置拍摄该自行走机器人的周围的状况的周围摄像机;生成包含由上述周围摄像机拍摄到的周围状况图像和上述自行走机器人模拟图像的复合图像;以及显示上述复合图像。
4、本公开起到能够提供能够避免具备机器人手臂的自行走机器人与周围的物体发生干涉的机器人系统以及机器人作业方法这样的效果。
技术特征:
1.一种机器人系统,其中,
2.根据权利要求1所述的机器人系统,其中,
3.根据权利要求1或2所述的机器人系统,其中,
4.根据权利要求1~3中任一项所述的机器人系统,其中,
5.根据权利要求1~4中任一项所述的机器人系统,其中,
6.根据权利要求1~5中任一项所述的机器人系统,其中,
7.根据权利要求6所述的机器人系统,其中,
8.根据权利要求6所述的机器人系统,其中,
9.一种机器人作业方法,其中,
技术总结
机器人系统具备自行走机器人、操作部、显示器、配置于自行走机器人并拍摄自行走机器人的周围的状况的周围摄像机、和处理电路,处理电路构成为,生成自行走机器人模拟图像,并生成包含由周围摄像机拍摄到的周围状况图像和生成的自行走机器人模拟图像的复合图像。
技术研发人员:扫部雅幸,冈朋晖
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!