对象的约束操纵的制作方法
本公开涉及使用机器人臂对对象的约束操纵。
背景技术:
1、机器人臂正越来越多地被用在约束或其他限制的环境中,以执行各种任务或功能。这些机器人臂通常需要有效地操纵约束对象,诸如门或开关,而不需要大量的计算。随着机器人臂变得越来越普遍,需要能够快速确定和执行与约束对象相关的路径的臂路径规划。
技术实现思路
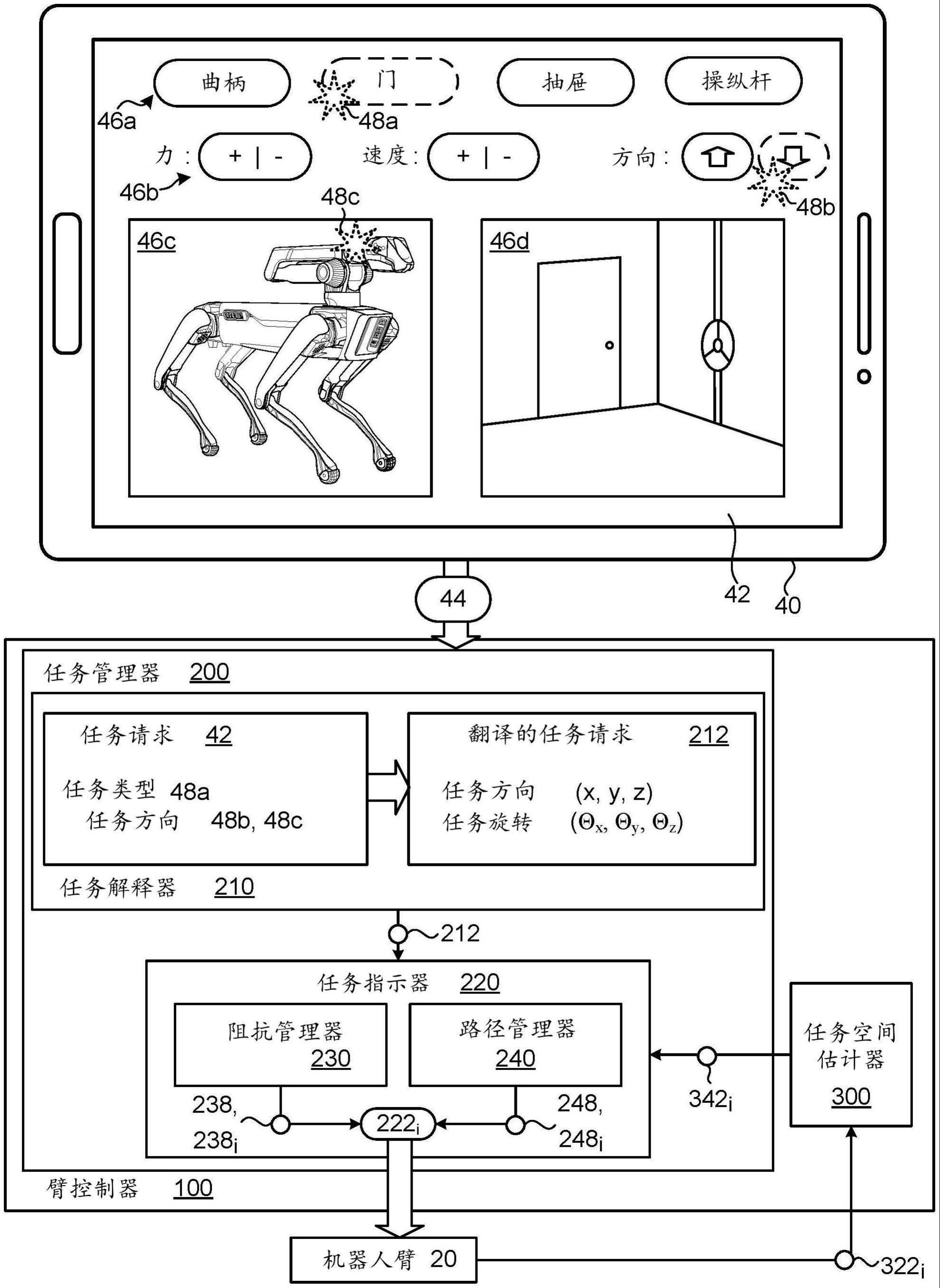
1、本公开的一个方面提供了一种计算机实现的方法。当由机器人的数据处理硬件执行时,计算机实现的方法使得数据处理硬件执行操作。该机器人包括铰接臂,该铰接臂具有与约束对象接合的末端效应器(end effector)。这些操作包括接收为末端效应器设置的测量任务参数。测量的任务参数集包括定义末端效应器位置的位置参数。这些操作还包括使用测量的任务参数集确定工作空间内末端效应器的至少一个自由轴和至少一个约束轴。这些操作还包括沿着至少一个自由轴将第一阻抗值分配给末端效应器,以及沿着至少一个约束轴将第二阻抗值分配给末端效应器。此外,操作包括指示铰接臂沿着至少一个自由轴移动末端效应器。
2、本公开的方面可以包括一个或多个以下可选特征。在一些实施方式中,确定至少一个自由轴和至少一个约束轴包括使用测量的任务参数集确定约束对象的任务空间模型。在一些实施例中,操作还包括将测量的任务参数集的至少一部分作为任务参数记录存储在任务缓冲器中。在进一步的实施例中,存储测量的任务参数集的至少一部分包括将来自测量的参数任务集的至少一个测量的参数与任务缓冲器的任务参数记录之一的记录的参数进行比较,以及当至少一个测量的参数和记录的参数之间的差满足记录阈值时生成新的任务参数记录。在更进一步的实施例中,测量的参数和记录的参数各自包括各自的位置参数和/或各自的速度参数。
3、在其他实施例中,操作还包括评估任务参数记录的位置参数,以确定与任务参数记录相关联的至少一个自由轴。在其他进一步的实施例中,操作还包括评估任务参数记录,以确定末端效应器是否与约束对象接合。
4、本公开的另一方面提供了一种机器人。机器人包括铰接臂、与铰接臂通信的数据处理硬件以及与数据处理硬件通信的存储硬件。铰接臂具有用于接合约束对象的末端效应器。存储器硬件存储指令,当在数据处理硬件上执行时,这些指令使得数据处理硬件执行操作。这些操作包括接收为末端效应器设置的测量任务参数。测量的任务参数集包括定义末端效应器位置的位置参数。这些操作还包括使用测量的任务参数集确定工作空间内末端效应器的至少一个自由轴和至少一个约束轴。这些操作还包括沿着至少一个自由轴将第一阻抗值分配给末端效应器,以及沿着至少一个约束轴将第二阻抗值分配给末端效应器。此外,操作包括指示铰接臂沿着至少一个自由轴移动末端效应器。
5、本公开的方面可以包括一个或多个以下可选特征。在一些实施方式中,确定至少一个自由轴和至少一个约束轴包括使用测量的任务参数集确定约束对象的任务空间模型。在一些示例中,操作还包括将测量的任务参数集的至少一部分存储在任务缓冲器中作为任务参数记录。在进一步的示例中,存储测量的任务参数集的至少一部分包括将来自测量的参数任务集的至少一个测量的参数与任务缓冲器的任务参数记录之一的记录的参数进行比较,并且当至少一个测量的参数和记录的参数之间的差满足记录阈值时生成新的任务参数记录。在更进一步的示例中,测量的参数和记录的参数各自包括各自的位置参数和/或各自的速度参数。
6、在其他进一步的示例中,操作还包括评估任务参数记录的位置参数,以确定与任务参数记录相关联的至少一个自由轴。在其他进一步的示例中,操作进一步包括评估任务参数记录以确定末端效应器是否与约束对象接合。
7、本公开的又一方面提供了一种计算机程序产品。计算机程序产品被编码在连接到机器人的非暂时性计算机可读存储介质上。该机器人包括铰接臂,该铰接臂具有用于接合约束对象的末端效应器。该计算机程序产品包括当由数据处理设备执行时使数据处理设备执行操作的指令。这些操作包括接收为末端效应器设置的测量任务参数。测量的任务参数集包括定义末端效应器位置的位置参数。这些操作还包括使用测量的任务参数集确定工作空间内末端效应器的至少一个自由轴和至少一个约束轴。这些操作还包括沿着至少一个自由轴将第一阻抗值分配给末端效应器,以及沿着至少一个约束轴将第二阻抗值分配给末端效应器。此外,操作包括指示铰接臂沿着至少一个自由轴移动末端效应器。
8、本公开的方面可以包括一个或多个以下可选特征。在一些实施方式中,确定至少一个自由轴和至少一个约束轴包括使用测量的任务参数集确定约束对象的任务空间模型。在一些实施例中,操作还包括将测量的任务参数集的至少一部分作为任务参数记录存储在任务缓冲器中。在进一步的实施例中,存储测量的任务参数集的至少一部分包括将来自测量的参数任务集的至少一个测量的参数与任务缓冲器的任务参数记录之一的记录的参数进行比较,并且当至少一个测量的参数和记录的参数之间的差超过记录阈值时生成新的任务参数记录。在更进一步的实施例中,测量的参数和记录的参数各自包括各自的位置参数和/或各自的速度参数。
9、在其他实施例中,操作还包括评估任务参数记录的位置参数,以确定与任务参数记录相关联的至少一个自由轴。在其他进一步的实施例中,操作还包括评估任务参数记录,以确定末端效应器是否与约束对象接合。
10、在附图和以下描述中阐述了本公开的一个或多个实施方式的细节。根据说明书和附图以及权利要求书,其他方面、特征和优点将变得显而易见。
技术特征:
1.一种计算机实现的方法(500),当由包括铰接臂(20)的机器人(10)的数据处理硬件(36)执行时,使得数据处理硬件(36)执行操作,所述铰接臂具有与约束对象(4)接合的末端效应器(24),所述操作包括:
2.根据权利要求1所述的方法(500),其中确定所述至少一个自由轴和所述至少一个约束轴包括使用所述测量的任务参数集(322)来确定所述约束对象(4)的任务空间模型(342)。
3.根据权利要求1或权利要求2所述的方法(500),其中所述操作还包括将所述测量的任务参数集(322)的至少一部分作为任务参数记录(324)存储在任务缓冲器(330)中。
4.根据权利要求3的方法(500),其中存储所述测量的任务参数集(322)的至少一部分包括:
5.根据权利要求4所述的方法(500),其中所述测量的参数和所述记录的参数各自包括相应的位置参数(p322)和/或相应的速度参数。
6.根据权利要求5所述的方法(500),其中所述操作还包括评估所述任务参数记录(324)的位置参数(p322),以确定与所述任务参数记录(324)相关联的至少一个自由轴。
7.根据权利要求3-6中任一项所述的方法(500),其中所述操作还包括评估任务参数记录(324)以确定末端效应器(24)是否与约束对象(4)接合。
8.一种机器人(10),包括:
9.根据权利要求8所述的机器人(10),其中确定所述至少一个自由轴和所述至少一个约束轴包括使用所述测量的任务参数集(322)来确定所述约束对象(4)的任务空间模型(342)。
10.根据权利要求8或权利要求9所述的机器人(10),其中所述操作还包括将所述测量的任务参数集(322)的至少一部分作为任务参数记录(324)存储在任务缓冲器(330)中。
11.根据权利要求10所述的机器人(10),其中存储所述测量的任务参数集(322)的至少一部分包括:
12.根据权利要求11所述的机器人(10),其中,其中所述测量的参数和所述记录的参数各自包括相应的位置参数(p322)和/或相应的速度参数。
13.根据权利要求12所述的机器人(10),其中所述操作还包括评估所述任务参数记录(324)的位置参数(p322),以确定与所述任务参数记录(324)相关联的至少一个自由轴。
14.根据权利要求10-13中任一项所述的机器人(10),其中所述操作还包括评估任务参数记录(324)以确定末端效应器(24)是否与约束对象(4)接合。
15.一种编码在连接到机器人(10)的非暂时性计算机可读存储介质(610,620,630)上的计算机程序产品(700),所述机器人包括具有用于接合约束对象(4)的末端效应器(24)的铰接臂(20),所述计算机程序产品(700)包括指令,当由数据处理设备(36)执行时,所述指令使数据处理设备(36)执行包括以下的操作:
16.根据权利要求15所述的产品(700),其中确定所述至少一个自由轴和所述至少一个约束轴包括使用所述测量的任务参数集(322)来确定所述约束对象(4)的任务空间模型(342)。
17.根据权利要求15或权利要求16所述的产品(700),其中所述操作还包括将所述测量的任务参数集(322)的至少一部分作为任务参数记录(324)存储在任务缓冲器(330)中。
18.根据权利要求17所述的产品(700),其中存储所述测量的任务参数集(322)的至少一部分包括:
19.根据权利要求18所述的产品(700),其中所述测量的参数和所述记录的参数各自包括相应的位置参数(p322)和/或相应的速度参数。
20.根据权利要求19的产品(700),其中所述操作还包括评估所述任务参数记录(324)的位置参数(p322),以确定与所述任务参数记录(324)相关联的至少一个自由轴。
21.根据权利要求17-20中任一项所述的产品(700),其中所述操作还包括评估任务参数记录(324)以确定末端效应器(24)是否与约束对象(4)接合。
技术总结
由机器人(10)的数据处理硬件(36)执行的计算机实现的方法(500)使得数据处理硬件执行操作。该机器人包括铰接臂(20),该铰接臂具有与约束对象(4)接合的末端效应器(24)。操作包括接收末端效应器的测量的任务参数集(322),包括定义末端效应器位置的位置参数(P<subgt;322</subgt;)。这些操作包括使用测量的任务参数集确定末端效应器的至少一个自由轴和至少一个约束轴。这些操作包括沿着至少一个自由轴将第一阻抗值(238)分配给末端效应器,并且沿着至少一个约束轴将第二阻抗值(238)分配给末端效应器。这些操作包括指示铰接臂沿着至少一个自由轴移动末端效应器。
技术研发人员:N·阿哈萨德希,A·A·里兹,G·费伊,R·E·鲍里尼
受保护的技术使用者:波士顿动力公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!