一种传感器装卸机械手的制作方法
本发明属于工件装卸,尤其涉及一种传感器装卸机械手。
背景技术:
1、传感器装卸机械手是一种机械手臂,它可以在机器人或其他自动化设备中用于装卸传感器。这种机械手通常具有多个自由度,可以灵活地抓取和放置传感器。具体来说,传感器装卸机械手通常包括一个或多个机械臂,可以通过旋转、伸缩、升降等动作,将传感器从一个位置移动到另一个位置。传感器装卸机械手在自动化生产线、装配线、仓库等场所中都有广泛的应用,可以大大提高生产效率和降低劳动成本。
2、现有的传感器装卸机械手,不便于灵活实现平面和垂向四自由度运动,且通过手动的方式改变平面内的位置,劳动强度高。因此,针对以上现状,迫切需要开发一种传感器装卸机械手,以克服当前实际应用中的不足。
技术实现思路
1、本发明实施例的目的在于提供一种传感器装卸机械手,旨在解决现有的传感器装卸机械手,不便于灵活实现平面和垂向四自由度运动,且通过手动的方式改变平面内的位置的问题。
2、本发明实施例是这样实现的,一种传感器装卸机械手,包括安装底座,还包括:
3、升降组件,所述升降组件安装于安装底座上,升降组件上安装有关节臂组件,所述升降组件用于驱动关节臂组件升降;
4、夹持组件,所述夹持组件安装于关节臂组件远离升降组件的一端,夹持组件用于工件的夹持,关节臂组件还用于使得所述夹持组件能够在水平面内移动位置。
5、进一步的技术方案,所述安装底座采用圆盘状结构,安装底座通过多个膨胀螺栓安装固定于地面上。
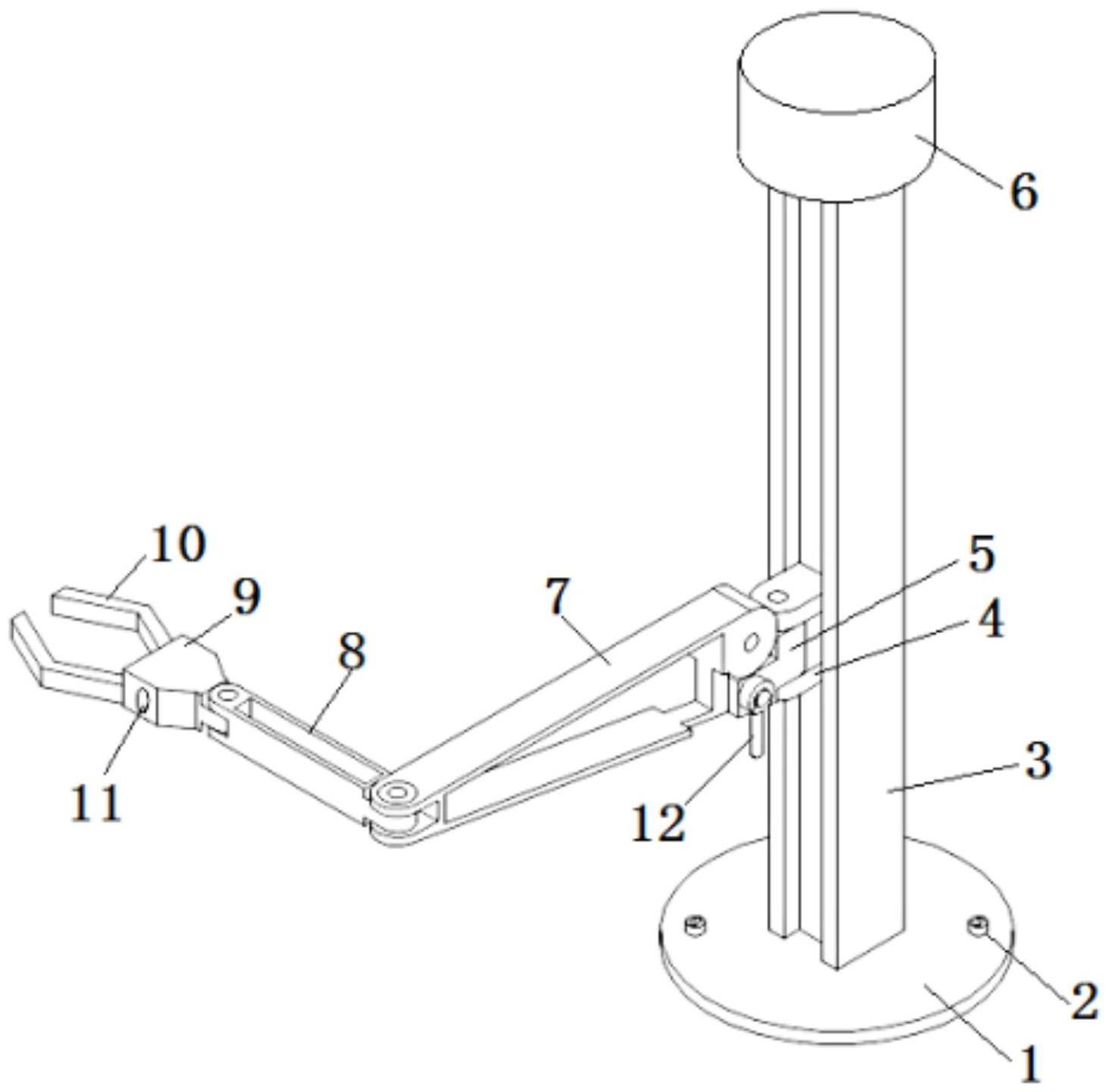
6、进一步的技术方案,所述升降组件包括支撑立柱、丝杆、螺母座和升降电机,所述支撑立柱安装固定于安装底座上,支撑立柱内开设有一侧开口的空腔,丝杆转动安装于所述空腔中,丝杆上螺纹连接有螺母座,所述关节臂组件的一端从空腔的开口穿过并安装固定于螺母座上,所述升降电机安装固定于支撑立柱的上端,且所述升降电机的输出端与丝杆的上端传动连接。
7、进一步的技术方案,所述开口为条形状,且所述关节臂组件与所述开口配合滑动连接。
8、进一步的技术方案,所述关节臂组件包括支板、支块、关节臂a和关节臂b,所述螺母座上安装固定有两个支板,两个支板之间转动安装有一个支块,支块能够围绕铰接点在水平面转动,所述支块上转动安装有一个关节臂a,关节臂a能够围绕铰接点在竖直面转动,所述关节臂a远离支块的一端转动安装有一个关节臂b,关节臂b能够围绕铰接点在水平面转动,所述夹持组件转动安装于关节臂b远离关节臂a的一端,夹持组件能够围绕铰接点在水平面转动。
9、进一步的技术方案,两个所述支板均从空腔的开口穿过,且两个所述支板均与空腔的开口滑动连接。
10、进一步的技术方案,所述支块上还安装有用于对关节臂a转动锁定的收放开关。
11、进一步的技术方案,所述夹持组件包括夹持座和夹持机械手,所述夹持座转动安装于关节臂b远离关节臂a的一端,夹持座上安装有用于夹持工件的夹持机械手,且所述夹持机械手采用电动夹持结构。
12、进一步的技术方案,所述夹持机械手包括两个v形状的夹持杆,且两个v形状的夹持杆相对设置。
13、进一步的技术方案,所述夹持座上还安装有用于对升降电机进行控制的升降控制钮。
14、本发明实施例提供的一种传感器装卸机械手,利用升降组件和关节臂组件的设置,可实现平面和垂向四自由度运动,且通过电动控制的夹持机械手,使得夹持力可调、可控,工件夹紧后,可通过升降控制钮控制升降电机动作改变高度位置,然后手工改变平面内的位置,可用于机器工件的助力装卸,减轻劳动强度。另外,通过关节臂组件的结构,以及收放开关的设置,在不使用时,可先转动关节臂a,再转动关节臂b,将关节臂组件收回、存放,减小空间占用。
技术特征:
1.一种传感器装卸机械手,包括安装底座,其特征在于,还包括:
2.根据权利要求1所述的传感器装卸机械手,其特征在于,所述安装底座采用圆盘状结构,安装底座通过多个膨胀螺栓安装固定于地面上。
3.根据权利要求1所述的传感器装卸机械手,其特征在于,所述升降组件包括支撑立柱、丝杆、螺母座和升降电机;
4.根据权利要求3所述的传感器装卸机械手,其特征在于,所述开口为条形状,且所述关节臂组件与所述开口配合滑动连接。
5.根据权利要求4所述的传感器装卸机械手,其特征在于,所述关节臂组件包括支板、支块、关节臂a和关节臂b;
6.根据权利要求5所述的传感器装卸机械手,其特征在于,两个所述支板均从空腔的开口穿过,且两个所述支板均与空腔的开口滑动连接。
7.根据权利要求5所述的传感器装卸机械手,其特征在于,所述支块上还安装有用于对关节臂a转动锁定的收放开关。
8.根据权利要求5-7任一项所述的传感器装卸机械手,其特征在于,所述夹持组件包括夹持座和夹持机械手;
9.根据权利要求8所述的传感器装卸机械手,其特征在于,所述夹持机械手包括两个v形状的夹持杆,且两个v形状的夹持杆相对设置。
10.根据权利要求8所述的传感器装卸机械手,其特征在于,所述夹持座上还安装有用于对升降电机进行控制的升降控制钮。
技术总结
本发明适用于工件装卸技术领域,提供了一种传感器装卸机械手,包括安装底座,还包括:升降组件,所述升降组件安装于安装底座上,升降组件上安装有关节臂组件,所述升降组件用于驱动关节臂组件升降;夹持组件,所述夹持组件安装于关节臂组件远离升降组件的一端,夹持组件用于工件的夹持,关节臂组件还用于使得所述夹持组件能够在水平面内移动位置。本发明便于灵活实现平面和垂向四自由度运动,且可通过手动的方式改变平面内的位置,减轻劳动强度。
技术研发人员:王海军,张永宏,李鹏,王升旭,吴庆,林晓亮
受保护的技术使用者:中航试金石检测科技(无锡)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!