机器人控制装置、机器人控制程序及机器人控制方法与流程
本发明涉及使多关节机器人从起点向终点移动的机器人控制装置、机器人控制程序及机器人控制方法。
背景技术:
1、在使机器人从起点至终点为止进行动作的通常的点对点控制中,为了减少作业实施中的处理、提高运算速度,有时在作业实施前生成考虑到与机器人主体及周边环境相关的限制的动作指令。另外,为了提高生产率,在作业实施前生成轨道时,希望生成将定量地对动作时间等生产率进行表现的评价值收敛于一定的范围内的轨道。在机器人作业的对象物体的位置及姿态没有被固定的情况下,需要与对象物体的实际的位置及姿态相应地生成动作轨道。为了生成满足全部限制的动作轨道会花费计算时间,因此广泛地进行了使用已经生成完成的动作轨道的信息将轨道生成所花费的时间缩短的措施。
2、在专利文献1所记载的技术中,设想出下述情况,即,预先生成了以某顺序经过多个作业区域而进行作业的动作轨道。动作轨道被分割为多个作业区域区间。在由于周边障碍物的配置或者形状变化而判断为动作轨道的一部分会与障碍物发生干涉时,仅针对会发生干涉的作业区域区间而再生成轨道。
3、专利文献1:日本专利第6560841号公报
技术实现思路
1、在专利文献1中,能够对会发生干涉的特定的作业区域区间的轨道进行变更,但成为变更对象的区间在判定为会发生与障碍物的干涉的区间被固定。但是,在对象物体的位置及姿态不同时,如果没有适当设定成为变更对象的区间,则有时在考虑与没有变更的区间的连接时评价值会超过能够容许的范围而恶化。例如,在与事先生成的轨道相比需要使机器人的指尖大幅倾斜的情况下,如果变更对象的区间短,则需要等待指尖的变更动作的等待时间,动作时间有可能变长。
2、本发明就是鉴于上述情况而提出的,其目的在于得到即使在对象物体的位置及姿态发生波动的情况下,也能够缩短生成评价值处于一定的范围内的轨道的时间的机器人控制装置。
3、为了解决上述课题,并达到目的,本发明中的机器人控制装置使机器人的末端执行器从起点移动至终点为止,针对位置及姿态没有被固定的对象物体而执行预先设定的任务。机器人控制装置具有:存储部,其与对象物体可取得的多个位置及姿态的组各自相对应地对参照轨道及分支点进行存储;测量部,其在任务执行时,对对象物体的位置及姿态进行测量;个别轨道生成部,其从存储部取得与测量出的对象物体的位置及姿态相对应的参照轨道及分支点,将测量出的对象物体的位置及姿态设定为终点,使用取得的参照轨道而生成从起点至分支点为止的机器人的动作轨道即第1动作轨道,进行第1运算而生成从取得的分支点至终点为止的机器人的动作轨道即第2动作轨道;以及机器人控制部,其按照包含第1动作轨道及第2动作轨道在内的动作指令对机器人进行驱动控制。参照轨道是从起点至对象物体可取得的多个位置及姿态的组之中的一个即第1点为止的机器人的动作轨道,是能够避免与障碍物的干涉,且满足评价值进入第一范围的动作轨道。分支点是参照轨道上的一点,是满足从分支点至第1点为止的动作轨道的评价值进入比第一范围大的第二范围的动作轨道。
4、发明的效果
5、根据本发明,具有下述效果,即,即使在对象物体的位置及姿态发生波动的情况下,也能够缩短生成评价值处于一定的范围内的轨道的时间。
技术特征:
1.一种机器人控制装置,其使机器人的末端执行器从起点移动至终点为止,针对位置及姿态没有被固定的对象物体而执行预先设定的任务,
2.根据权利要求1所述的机器人控制装置,其特征在于,
3.根据权利要求2所述的机器人控制装置,其特征在于,
4.根据权利要求3所述的机器人控制装置,其特征在于,
5.根据权利要求3所述的机器人控制装置,其特征在于,
6.根据权利要求2所述的机器人控制装置,其特征在于,
7.根据权利要求2所述的机器人控制装置,其特征在于,
8.根据权利要求1所述的机器人控制装置,其特征在于,
9.一种机器人控制装置,其使机器人的末端执行器从起点移动至终点为止,针对位置及姿态没有被固定的对象物体而执行预先设定的任务,
10.根据权利要求9所述的机器人控制装置,其特征在于,
11.根据权利要求10所述的机器人控制装置,其特征在于,
12.根据权利要求2或10所述的机器人控制装置,其特征在于,
13.根据权利要求1至12中任一项所述的机器人控制装置,其特征在于,
14.一种机器人控制程序,其使机器人的末端执行器从起点移动至终点为止,针对位置及姿态没有被固定的对象物体而执行预先设定的任务,
15.一种机器人控制方法,其使机器人的末端执行器从起点移动至终点为止,针对位置及姿态没有被固定的对象物体而执行预先设定的任务,
技术总结
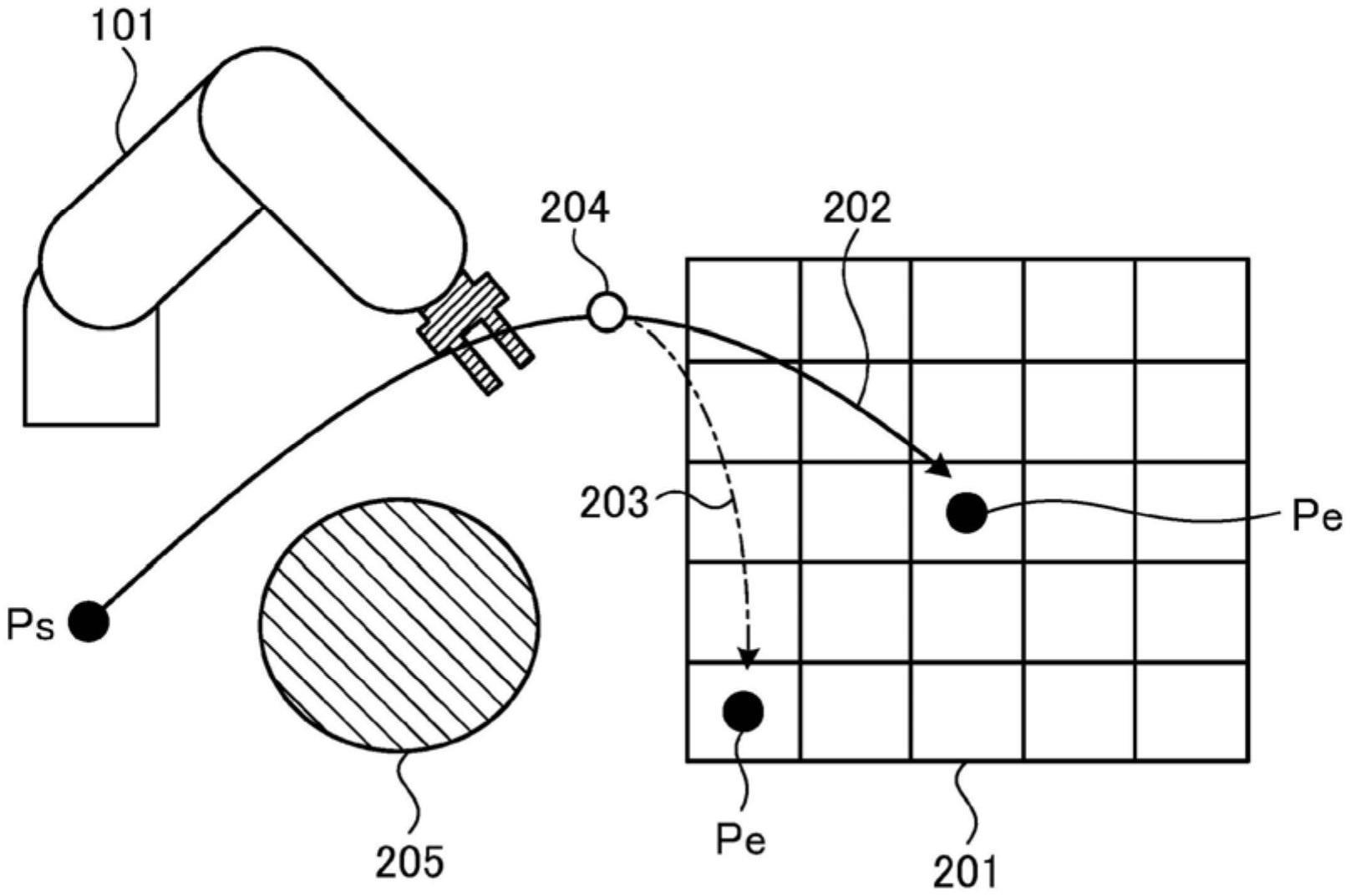
取得与测量出的对象物体的位置及姿态相对应的参照轨道(202)及分支点(204),将测量出的对象物体的位置及姿态设定为终点(Pe),直接使用取得的参照轨道(202)而生成从起点(Ps)至分支点(204)为止的机器人(101)的动作轨道即第1动作轨道,进行第1运算而生成从分支点(204)至终点(Pe)为止的机器人(101)的动作轨道即第2动作轨道,按照包含第1动作轨道及第2动作轨道在内的动作指令对机器人(101)进行驱动控制。
技术研发人员:春尾七星,冈原卓矢
受保护的技术使用者:三菱电机株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!