机器人夹具及其使用方法与流程
本发明涉及一种机器人夹具、包括该机器人夹具的机器人系统及其使用方法。
背景技术:
1、尽管进行了大量的开发工作,但是当前的机器人夹具的多功能性和灵活性仍远远低于人手。大多数的两指夹具只能通过挤压物体来保持物体,因此,如果物体屈服于挤压压力,则它很可能会从夹具中逃脱,或者如果控制夹具以维持一定的挤压压力,则物体可能会被它压碎。当夹持表面没有缓冲时,它将仅在物体的非常有限的表面区域上施加挤压力,并且因此可能会损坏物体。具有三个弯曲指状部的夹具可以在不按压物体的情况下抓取物体,但是不适合操纵长方体形状的物体。
技术实现思路
1、本发明的一个目的是提供一种机器人夹具,通过该机器人夹具可以操纵多种不同形状的物体,无论是易弯曲的还是不易弯曲的。
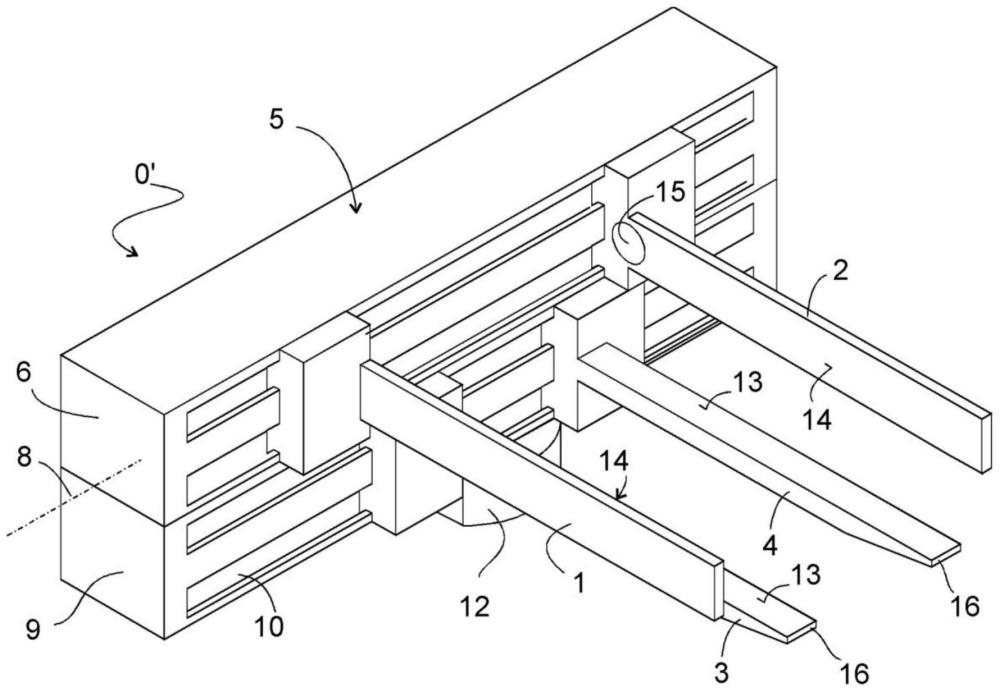
2、该目的通过改进的双指夹具来实现,即,机器人夹具包括掌部以及连接到所述掌部的第一指状部和第二指状部,第一指状部和第二指状部具有彼此面对的夹持表面以夹持在它们之间的物体并且沿着垂直于所述夹持表面的第一轴线而相对于彼此是可移位的,该修改在于,掌部至少承载具有支撑表面的第三指状部,其中当夹具处于使用姿势中时,该支撑表面被取向成水平的且面朝上的,第一轴线也是水平的并且夹持表面位于支撑表面上方。因此,由于第三指状部承载所操纵的物体的大部分重量,因此由第一指状部和第二指状部施加的非常轻微的压力就足以安全地保持该物体。
3、第三指状部的尖远端可以有助于将第三指状部引入到待被操纵的物体下方。
4、第三指状部可以平行于第一轴线是可移位的,以便将其位置调整到物体的重心。
5、第三指状部可以在由第一指状部的夹持表面所限定的平面的不同侧之间是可移位的。通过将第三指状部移动到所述平面的远离第二指状部的一侧,可以清空夹持表面之间的空间,并且可以将物体直接放置在支撑件上,而无需随后不得不将第三指状部从下方缩回。
6、为了允许第三指状部独立于第一指状部和第二指状部移动,掌部可包括第一导轨和第二导轨,该第一导轨限定用于引导第一指状部和第二指状部的位移的第一轴线,该第二导轨平行于第一导轨并且限定用于引导第三指状部的位移的第二轴线。
7、可以提供第四指状部,其具有与第三指状部的支撑表面共面的支撑表面,并且因此帮助第三指状部承载物体的重量。通过使第三指状部和第四指状部彼此间隔开,可以提高对物体的支撑的稳定性。
8、优选地,第四指状部也平行于第一轴线是可移位的;它可以由上面提及的第二导轨来引导。
9、力或扭矩传感器应当与第一指状部和第二指状部中的至少一者相关联。如果第一指状部和第二指状部都具有与其相关联的传感器,则有利于控制第一指状部和第二指状部的位移,如下面将详细解释的。
10、为了有利于将机器人夹具放置在待被抓取的物体附近,机器人夹具可以包括传感器,该传感器被布置为监测在掌部前方空间。
11、优选地,传感器是2d扫描仪。2d扫描仪不仅可以检测待被抓取的物体是否存在于夹具的前方,而且它还可以提供关于夹具相对于物体的位置的定量信息,该信息可以被用于整体地调节夹具的位置,或者优选地调节夹具的各个指状部的位置。当来自2d扫描仪的信息被用于控制平行于第一轴线的各指状部的位置时,2d扫描仪应当具有平行于第一轴线或平行于支撑表面的检测平面。
12、为了机器人夹具的快速且有效的操作,检测平面应当优选地位于一方面由第一指状部和第二指状部的下边缘所限定的平面与另一方面的支撑表面之间,使得当夹具被放置在适合于将第三指状部引入到待被抓取的物体下方的高度时,物体将延伸穿过检测平面。因此,它的第一指状部和第二指状部的位置可以基于来自传感器的数据来被调整到物体的横向侧面的位置,并且当调整完成时,可以使夹具前进以抓取物体,而无需对其位置的任何进一步校正。
13、根据替代的优选实施例,传感器及其检测平面位于第三指状部下方。这种设计意味着,为了在抓取物体之前扫描物体,必须首先将夹具放置成使得其检测平面与物体相交,然后使其降低,以便能够将第三指状部引入到物体下方。该实施例的优点在于以下事实:2d扫描仪不会被保持在夹具中的物体所阻挡,并且因此可以被用来在实际将物体放置在待被放置的位置之前检查位于待放置物体的位置的目标,这可能有助于避免各指状部干扰2d扫描仪对物体的检测。
14、虽然为了夹持和释放物体,如果第一指状部和第二指状部被联接成仅在相反方向上可移位就足够了,但是在本发明的上下文中,非常期望第一指状部和第二指状部应当能够沿着所述第一轴线在相同方向上是可移位的,或者第一指状部和第二指状部中的一者应当沿着第一轴线是可移位的,而另一者保持静止,如将在下面更详细地解释的。
15、本发明的另一目的是一种机器人系统,其包括配备有如上所述的夹具的机器人、特别是铰接式机器人,以及用于存储待由夹具操纵的物体的搁架。
16、在这样的系统中,通过搁架的上侧来促进抓取物体,该搁架包括用于支撑物体的支撑条,支撑条被间隙分隔开,该间隙的尺寸设置为容纳第三指状部和第四指状部(如果存在的话)。因此,第三指状部和第四指状部可以沿纵向被插入物体下方,而不需要推动物体。
17、搁架单元可以包括由柱支撑的一个或多个搁架。
18、当在步骤b)和d)的过程中使夹具前进到搁架单元中时,为了抓取位于柱附近的物体,柱与夹具掌部的干涉可能会阻碍夹具前进得足够远。类似地,同一搁架上的大物体可能会阻碍夹具的前进。根据本发明,这可以通过在步骤b)和d)之前执行以下步骤来避免:
19、f)识别与待被抓取的物体相邻的障碍物;
20、g)将夹具安置在当在前进方向上看时所述夹具不与障碍物重叠的位置中,以及
21、h)调整第一指状部和第二指状部之一的位置,以与物体和障碍物之间的空间重叠。
22、2d扫描仪还可以有利于在没有第三指状部或第四指状部的机器人夹具中抓取物体。因此,本发明还涉及一种夹具,其包括掌部以及连接到所述掌部的第一指状部和第二指状部,第一指状部和第二指状部具有彼此面对的夹持表面以夹持在它们之间的物体并且沿着垂直于所述夹持表面的第一轴线相对于彼此是可移位的,其中掌部还承载2d扫描仪,特别是具有平行于第一轴线的检测平面的2d扫描仪。
技术特征:
1.一种机器人夹具(0、0'),包括:掌部(5)和
2.根据权利要求1所述的机器人夹具,其中所述第三指状部(3)平行于所述第一轴线(8)是可移位的。
3.根据权利要求2所述的机器人夹具,其中所述第三指状部(3)在由所述第一指状部(1)的所述夹持表面(12)所限定的平面的不同侧之间是可移位的。
4.根据前述权利要求中任一项所述的机器人夹具,其中所述掌部(5)包括第一导轨(7)和第二导轨(10),所述第一导轨(7)限定用于引导所述第一指状部(1)和所述第二指状部(2)的位移的所述第一轴线(8),所述第二导轨(10)平行于所述第一导轨(7)并且限定用于引导所述第三指状部(3)的位移的第二轴线。
5.根据前述权利要求中任一项所述的机器人夹具,其中第四指状部(4)具有与所述第三指状部(3)的所述支撑表面(13)共面的支撑表面(13)。
6.根据前述权利要求中任一项所述的机器人夹具,其中力或扭矩传感器(15)与所述第一指状部(1)和所述第二指状部(2)中的至少一者相关联。
7.根据前述权利要求中任一项所述的机器人夹具,还包括传感器,所述传感器被布置为监测在所述掌部(5)前方的空间。
8.根据权利要求7所述的机器人夹具,其中所述传感器是2d扫描仪(12),优选地具有平行于所述支撑表面(13)的检测平面(17)。
9.根据权利要求7所述的机器人夹具,其中所述传感器在所述第三指状部(3)下方被安装到所述掌部(5)。
10.根据前述权利要求中任一项所述的机器人夹具,其中所述第一指状部(1)和所述第二指状部(2)沿着所述第一轴线(8)在相同的方向上是可移位的,或者其中所述第一指状部(1)和所述第二指状部(2)中的一者沿着所述第一轴(8)是可移位的而另一者保持静止。
11.一种机器人系统,包括配备有根据前述权利要求中任一项所述的夹具(0、0')的机器人和用于存储将由所述夹具(0、0')操纵的物体(19、20)的搁架(18)。
12.根据权利要求11所述的机器人系统,其中所述搁架(18)的上侧包括用于支撑所述物体(19、20)的支撑条(21),所述支撑条被间隙(22)分隔开,所述间隙的尺寸设置为容纳所述第三指状部(3)。
13.一种操作根据权利要求1至10中任一项所述的夹具的方法,包括以下步骤:
14.根据权利要求13所述的方法,其中通过将所述第三指状部(3)纵向接合所述支撑件的间隙(22)来执行步骤d)。
15.根据权利要求13或14所述的方法,其中通过使所述夹具(0、0')在所述指状部(1-4)的纵向方向上前进来执行步骤b)和d),优选地在步骤b)和d)之前还包括以下步骤:
技术总结
一种机器人夹具(0、0'),包括掌部(5)和连接到所述掌部(5)的第一指状部(1)和第二指状部(2),第一指状部(1)和第二指状部(2)具有彼此面对的夹持表面(12)以夹持在它们之间的物体(19)并且沿着垂直于所述夹持表面(12)的第一轴线(8)相对于彼此是可移位的。掌部(5)还承载具有支撑表面(12)的至少第三指状部(3),其中当夹具(0、0')处于使用姿势中时,支撑表面(12)被取向成水平的且面朝上的,第一轴线(8)也是水平的并且夹持表面(14)位于支撑表面(13)上方。
技术研发人员:威廉·万德霍伊多克,鲁迪·勒罗伊
受保护的技术使用者:ABB瑞士股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!