一种用于智能制造的机械手的制作方法
1.本发明是一种用于智能制造的机械手,属于智能制造设备领域。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,且多数机械手采用夹持的方式进行货物的夹持与放置,对于部分壳体较为脆弱的货物在进行夹持的过程中由于不能够大力夹持,在移动的过程中容易甩飞十分不便。
技术实现要素:
3.针对现有技术存在的不足,本发明目的是提供一种用于智能制造的机械手,以解决对于部分壳体较为脆弱的货物在进行夹持的过程中由于不能够大力夹持,在移动的过程中容易甩飞十分不便的问题。
4.为了实现上述目的,本发明是通过如下的技术方案来实现:一种用于智能制造的机械手,其结构包括:机械爪、驱动臂、关节电机、旋转电机、机体,所述机械爪安设在驱动臂左侧连接处,所述关节电机通过螺栓固定在驱动臂主臂与副臂连接的关节处,所述旋转电机固定在机体顶部连接耳与驱动臂主臂底部驱动关节处,所述驱动臂主臂中心位于机体的中部,所述机械爪包括:关节辅助臂、驱动箱、夹持节板,所述关节辅助臂安设在驱动箱与驱动臂之间,且关节辅助臂顶部驱动电机与驱动箱底部活动槽相互嵌套,所述驱动箱底部设有夹持节板,且与夹持节板通过传动带进行机械连接,所述驱动箱控制主线经过驱动臂的内槽与机体内部主控板形成闭环电路。
5.作为优选的,所述夹持节板包括:夹持带、调整关节、辅助夹、形变关节、驱动带轮,所述夹持带包裹在调整关节的外沿,且与顶部的驱动带轮通过机械连接,所述调整关节底部与辅助夹活动连接,所述形变关节通过螺栓固定在驱动箱的底部,且与夹持带内导条间隙配合,所述驱动箱内部设有两个的驱动带轮,且与内部电机通过传动带相连接。
6.作为优选的,所述形变关节内部设有驱动电机,且通过传输带连接调整关节关节处的检测扇轮,通过传输带对检测扇轮进行驱动,当关节进行弯折的时候检测扇轮带动中部的主轮使得同步滑板能够同步进行调整夹持带。
7.作为优选的,所述夹持带包括:辅助条、限位触条、传输夹带、导向主条,所述辅助条安设在导向主条的底部,且辅助条与导向主条拼接形成等宽高的条状轨,所述限位触条设有两个以上,均匀分布在传输夹带的外部表面,且限位触条之间保持相互平行,所述传输夹带内部与导向主条左侧表面通过胶连接,所述导向主条外表面与调整关节内槽通过活动连接,所述传输夹带内表面与驱动带轮通过机械连接。
8.作为优选的,所述辅助条右侧表面设有锯齿,且截面为等腰梯形结构,底部通过胶连接与夹持带形成一体结构,锯齿状结构能够方便进行弯折,且在夹持受力的过程中能够进行限位避免夹持带在夹持的过程中受力过大造成疲劳,进而影响其使用寿命。
9.作为优选的,所述调整关节包括:主轮、检测扇轮、同步滑板、臂体,所述主轮安设在臂体的中部,且外齿与底部的检测扇轮外齿相互啮合,所述检测扇轮固定在臂体的底部关节处,且与辅助夹通过轴连接,所述同步滑板上下边缘嵌套固定在臂体的内槽的导轨处,并与主轮外齿相互啮合。
10.作为优选的,所述同步滑板左侧边角通过倒角处理,且中部设有两条导向槽,导向槽之间相互平行,通过导向槽与辅助条导向主条进行连接避免夹持的时候左右便宜。
11.作为优选的,所述主轮主轴处设有矩形滑块,在旋转驱动中部的同步滑板使得受力更加均匀,同时整体结构更加的紧凑稳定。
12.作为优选的,所述同步滑板整体为金属材质,中心板两侧对称分布设有齿条,两侧同步进行受力,夹持的过程中更加的线性,提高与被夹物之间的牢固性。
13.有益效果
14.本发明一种用于智能制造的机械手,具有以下效果:
15.本发明通过驱动带轮驱动夹持带将货物垂直上移,辅助夹同步旋转,将货品的底部进行支撑,通过夹持带大范围的受力面,减少了夹持过程中对货品外包进行损伤,同时底部的辅助夹辅助保护,大大提高了货品在运输过程中的稳定性。
16.本发明通过辅助条导向主条进行配合,在同步滑板的导向槽内,上下移动的过程中更加的稳定,同时在关节弯折的时候辅助条边侧的锯齿结构方便进行弯折,且弯折后锯齿与关节限位相互吻合,大大提高了传输夹带的支撑力。
17.本发明通过主轮与检测扇轮进行联动,在夹持的过程中调整同步滑板的范围,使得臂体能够对传输夹带进行支撑,提高夹持的牢固性。
附图说明
18.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
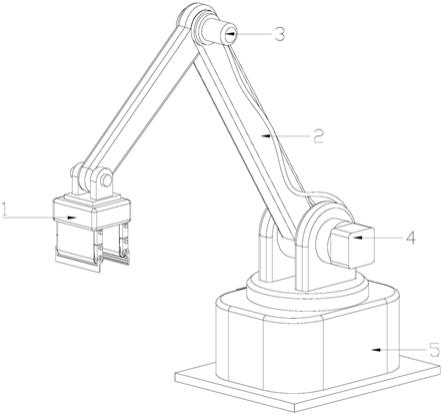
19.图1为本发明一种用于智能制造的机械手的结构示意图。
20.图2为本发明机械爪的正视结构示意图。
21.图3为本发明关节辅助臂的剖视结构示意图。
22.图4为本发明夹持带的结构示意图。
23.图5为本发明调整关节的结构示意图。
24.图6为本发明机械爪夹持货物的结构示意图。
25.图中:机械爪-1、驱动臂-2、关节电机-3、旋转电机-4、机体-5、关节辅助臂-11、驱动箱-12、夹持节板-13、夹持带-131、调整关节-132、辅助夹-133、形变关节-134、驱动带轮-135、辅助条-131a、限位触条-131b、传输夹带-131c、导向主条-131d、主轮-132a、检测扇轮-132b、同步滑板-132c、臂体-132d。
具体实施方式
26.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
27.实施例1:
28.根据图1-图3所示,所述机械爪1包括:关节辅助臂11、驱动箱12、夹持节板13,所述关节辅助臂11安设在驱动箱12与驱动臂2之间,且关节辅助臂11顶部驱动电机与驱动箱12底部活动槽相互嵌套,所述驱动箱12底部设有夹持节板13,且与夹持节板13通过传动带进行机械连接,所述驱动箱12控制主线经过驱动臂2的内槽与机体5内部主控板形成闭环电路,所述夹持节板13包括:夹持带131、调整关节132、辅助夹133、形变关节134、驱动带轮135,所述夹持带131包裹在调整关节132的外沿,且与顶部的驱动带轮135通过机械连接,所述调整关节132底部与辅助夹133活动连接,所述形变关节134通过螺栓固定在驱动箱12的底部,且与夹持带131内导条间隙配合,所述驱动箱12内部设有两个的驱动带轮135,且与内部电机通过传动带相连接,所述形变关节134内部设有驱动电机,且通过传输带连接调整关节132关节处的检测扇轮132b,通过传输带对检测扇轮132b进行驱动,当关节进行弯折的时候检测扇轮132b带动中部的主轮132使得同步滑板132c能够同步进行调整夹持带131。
29.上述通过驱动带轮135驱动夹持带131将货物垂直上移,此时底部的辅助夹133在夹持带131上移后同步旋转,将货品的底部进行支撑,通过夹持带131大范围的受力面减少了夹持过程中对货品外包进行损伤,同时底部的辅助夹133辅助保护,大大提高了货品在运输过程中的稳定性。
30.实施例2:
31.根据图4所示,所述夹持带131包括:辅助条131a、限位触条131b、传输夹带131c、导向主条131d,所述辅助条131a安设在导向主条131d的底部,且辅助条131a与导向主条131d拼接形成等宽高的条状轨,所述限位触条131b设有两个以上,均匀分布在传输夹带131c的外部表面,且限位触条131b之间保持相互平行,所述传输夹带131c内部与导向主条131d左侧表面通过胶连接,所述导向主条131d外表面与调整关节132内槽通过活动连接,所述传输夹带131c内表面与驱动带轮135通过机械连接,所述辅助条131a右侧表面设有锯齿,且截面为等腰梯形结构,底部通过胶连接与夹持带131形成一体结构,锯齿状结构能够方便进行弯折,且在夹持受力的过程中能够进行限位避免夹持带131在夹持的过程中受力过大造成疲劳,进而影响其使用寿命。
32.上述的辅助条131a导向主条131d进行配合,嵌套在调整关节132的同步滑板132c的导向槽内,上下移动的过程中更加的稳定,同时在关节弯折的时候辅助条131a边侧的锯齿结构方便进行弯折,且弯折后锯齿与关节限位相互吻合,大大提高了传输夹带131c的支撑力。
33.实施例3:
34.根据图5所示,所述调整关节132包括:主轮132a、检测扇轮132b、同步滑板132c、臂体132d,所述主轮132a安设在臂体132d的中部,且外齿与底部的检测扇轮132b外齿相互啮合,所述检测扇轮132b固定在臂体132d的底部关节处,且与辅助夹133通过轴连接,所述同步滑板132c上下边缘嵌套固定在臂体132d的内槽的导轨处,并与主轮132a外齿相互啮合,所述同步滑板132c左侧边角通过倒角处理,且中部设有两条导向槽,导向槽之间相互平行,通过导向槽与辅助条131a导向主条131d进行连接避免夹持的时候左右便宜,所述主轮132a主轴处设有矩形滑块,在旋转驱动中部的同步滑板132c使得受力更加均匀,同时整体结构更加的紧凑稳定,所述同步滑板132c整体为金属材质,中心板两侧对称分布设有齿条,两侧同步进行受力,夹持的过程中更加的线性,提高与被夹物之间的牢固性。
35.上述的主轮132a与检测扇轮132b进行联动,在夹持的过程中调整同步滑板132c的范围,使得臂体132d能够对传输夹带131c进行支撑,提高夹持的牢固性。
36.下面对本发明一种用于智能制造的机械手果蔬垃圾快速清理设备的工作原理进行说明:
37.机械爪1固定在驱动臂2的前端,驱动臂2通过关节电机3以及旋转电机4在机体5上进行移动,以便于将货物输送至指定的位置。
38.在对货品进行搬运的时候,形变关节134驱动调整关节132稍微向外进行扩张,当移动至货物顶部的时候调整关节带动夹持带131收缩,同时顶部的驱动带轮135启动,将货品稳定的向上移动,且当传输夹带131c在进行移动的时候由辅助条131a与限位触条131b进行限位,避免了传输夹带131的晃动,且为了避免弯折的过程中传输夹带131产生空隙,造成夹持支撑力降低的情况发生,通过主轮132a将同步滑板132c向中部移动,进而大大提高了支撑力。
39.当传输夹带131带动货品向上移动后辅助夹133向对侧旋转,对货品的底部的进行托持,避免了货物在高速移动的过程中甩落的情况发生。
40.以上仅描述了本发明的基本原理和优选实施方式,本领域人员可以根据上述描述作出许多变化和改进,这些变化和改进应该属于本发明的保护范围。
41.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1