一种新型机械手的制作方法
1.本发明涉及工程机械技术领域,特别涉及一种新型机械手。
背景技术:
2.机械手是机械臂实现抓取拿放物品的必要组成部分,例如专利号:2020214522811的中国专利公开了一种双夹头可旋转机械手和使用双夹头可旋转机械手的机械手设备,其由下箱体、左右滑座机构、上下滑座机构、前后滑座机构和机械手组成,其中机械手为直角双头结构,设在前后滑座机构一端,双头可同时夹持且可通过谐波减速机旋转同时变换角度,一种结构简单,操作便捷,生产效率和品质稳定性高的一种双夹头可旋转机械手和使用双夹头可旋转机械手的机械手设备;但其机械手结构复杂,成本高,末端执行机构不易更换;同时其在抓取物品过程不能先快后慢,导致夹板与物块刚性冲击较大;在物品放置松开过程中不能先慢后快,导致放置过程不平稳;因此,我们急需发明一种新型机械手来解决上述技术问题。
技术实现要素:
3.针对上述问题,本发明提供一种新型机械手,其通过成双成对首尾相连且连杆中间对应交叉转动连接的方式构成构成了平行四边形连杆机构,实现了当伸缩缸的伸缩杆均速收缩时,平行四边形连杆机构的收缩角度会逐渐变小,从而实现夹板夹持过程先快后慢,减少了夹板与被加持物的刚性冲击;当伸缩缸的伸缩杆均速伸出时,平行四边形连杆机构的收缩角度会逐渐变大,从而实现夹板夹持过程先慢后快,使夹板放置被加持物时更加平稳。
4.本发明所使用的技术方案是:一种新型机械手,包括:伸缩缸、伸缩缸固定座、平行四边形连杆机构、夹板连接杆和夹板;所述伸缩缸固定座固定安装在工程机械的机械臂上;所述伸缩缸的缸体固定安装在伸缩缸固定座上部;所述伸缩缸固定座上开设有滑槽;所述平行四边形连杆机构以成双成对首尾相连且连杆中间对应交叉转动连接的方式构成;平行四边形连杆机构中部下侧铰接在伸缩缸固定座的下部,平行四边形连杆机构中部上侧通过轴承安装在伸缩缸固定座的滑槽中;所述伸缩缸的伸缩杆与平行四边形连杆机构中部上侧的连接轴固定连接;所述夹板连接杆上部开设有与伸缩缸固定座滑槽位置高度相对应的滑槽;平行四边形连杆机构两端的下侧铰接在夹板连接杆的下部,平行四边形连杆机构两端的上侧通过轴承安装在夹板连接杆的滑槽中;所述夹板固定安装在夹板连接杆末端;所述伸缩缸的伸缩杆收缩,带动平行四边形连杆机构收合,因平行四边形连杆机构的中部下侧铰接在伸缩缸固定座的下部,所以在平行四边形连杆机构拉开或收合过程中夹板的高度不会变化,从而保证了加持的平稳性;当伸缩缸的伸缩杆均速收缩时,平行四边形连杆机构的收缩角度会逐渐变小,从而实现夹板夹持过程先快后慢,减少了夹板与被加
持物的刚性冲击;当伸缩缸的伸缩杆均速伸出时,平行四边形连杆机构的收缩角度会逐渐变大,从而实现夹板夹持过程先慢后快,使夹板放置被加持物时更加平稳。
5.进一步地,所述伸缩缸为伸缩气缸或伸缩液压缸。
6.进一步地,所述夹板内侧设置有防滑橡胶条纹。
7.进一步地,所述轴承均为圆柱滚子轴承。
8.进一步地,所述平行四边形连杆机构由45#钢经过淬火制造而成。
9.由于本发明采用了上述技术方案,本发明具有以下优点:(1)本发明通过成双成对首尾相连且连杆中间对应交叉转动连接的方式构成构成了平行四边形连杆机构,实现了当伸缩缸的伸缩杆均速收缩时,平行四边形连杆机构的收缩角度会逐渐变小,从而实现夹板夹持过程先快后慢,减少了夹板与被加持物的刚性冲击;当伸缩缸的伸缩杆均速伸出时,平行四边形连杆机构的收缩角度会逐渐变大,从而实现夹板夹持过程先慢后快,使夹板放置被加持物时更加平稳;(2)本发明伸缩缸的伸缩杆与连接杆与与平行四边形连杆机构中部上侧的连接轴直连,传动简单方便,成本低;(3)本发明的两个夹板可以根据实际需要进行更换,更换过程简单,增加机械手的适应性。
附图说明
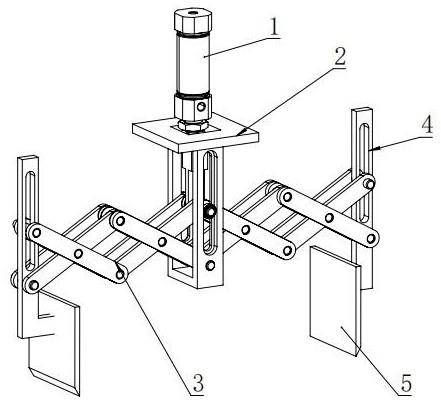
10.图1为本发明的整体结构示意图。
11.图2为本发明的部分结构示意图。
12.图3为本发明的平行四边形连杆机构的连杆结构示意图。
13.图4为本发明的夹板连接杆结构示意图。
14.附图标号:1-伸缩缸、2-伸缩缸固定座、3-平行四边形连杆机构、4-夹板连接杆;5-夹板。
具体实施方式
15.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员能够在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
16.在本发明的描述中,需要说明的是,术语“上”、“下”、
ꢀ“
前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
17.实施例,如图1-4所示,一种新型机械手,包括:伸缩缸1、伸缩缸固定座2、平行四边形连杆机构3、夹板连接杆4和夹板5;伸缩缸固定座2固定安装在工程机械的机械臂上;伸缩缸1的缸体固定安装在伸缩缸固定座2上部;伸缩缸固定座2上开设有滑槽;
平行四边形连杆机构3以成双成对首尾相连且连杆中间对应交叉转动连接的方式构成;平行四边形连杆机构3中部下侧铰接在伸缩缸固定座2的下部,平行四边形连杆机构3中部上侧通过轴承安装在伸缩缸固定座2的滑槽中;所述伸缩缸1的伸缩杆与平行四边形连杆机构3中部上侧的连接轴固定连接;夹板连接杆4上部开设有与伸缩缸固定座2滑槽位置高度相对应的滑槽;平行四边形连杆机构3两端的下侧铰接在夹板连接杆4的下部,平行四边形连杆机构3两端的上侧通过轴承安装在夹板连接杆4的滑槽中;夹板5固定安装在夹板连接杆4末端;采用平行四边形连杆机构3运行平稳,可靠性强;同时,夹板5可以根据实际需要变换结构,扩大了本机械爪的使用范围,提高了通用性;伸缩缸1的伸缩杆收缩,带动平行四边形连杆机构3收合,因平行四边形连杆机构3的中部下侧铰接在伸缩缸固定座2的下部,所以在平行四边形连杆机构3拉开或收合过程中夹板5的高度不会变化,从而保证了加持的平稳性;当伸缩缸1的伸缩杆均速收缩时,平行四边形连杆机构3的收缩角度会逐渐变小,根据三角函数原理,角度越小,所对应的三角边越短,也就是位移越短,从而实现夹板5夹持过程先快后慢,减少了夹板5与被加持物的刚性冲击;同理,当伸缩缸1的伸缩杆均速伸出时,平行四边形连杆机构3的收缩角度会逐渐变大,从而实现夹板5夹持过程先慢后快,使夹板5放置被加持物时更加平稳,从而解决了现有机械手结构复杂且在抓取物品过程不能先快后慢,导致夹板与物块刚性冲击较大;在物品放置松开过程中不能先慢后快,导致放置过程不平稳的问题。
18.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,伸缩缸1为伸缩气缸或伸缩液压缸;根据待加持物体的重量等因素确定合理的伸缩缸1,方便使用者使用;夹板5内侧设置有防滑橡胶条纹,增大摩擦力,防止物品意外脱落;轴承均为圆柱滚子轴承,增加机械手的使用寿命;平行四边形连杆机构3由45#钢经过淬火制造而成,以提高平行四边形连杆机构3的整体强度,方便其与多种机械爪的配合,简化了结构,节约了能源,提高了工作效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1