基于子母折纸的形状记忆合金丝驱动软体机器人
1.本发明属于软体机器人设计领域,具体涉及一种基于子母折纸的形状记忆合金丝驱动软体机器人。
背景技术:
2.刚性机器人由于其笨重、僵硬的框架,不适合收纳、运输或者在狭小的空间中工作,从而如何设计轻质、柔顺的软体机器人成为科学界以及工程领域的重要研究课题之一。
3.近几十年来,研究人员提出了一种新的结构,称为折纸。折纸这个术语用来描述一种古老的折叠艺术,ori的词根表示折叠,而-gami表示纸张。折纸术的基本理论是将一张纸从二维变形为三维几何镶嵌,近几十年来,这一思想的研究和应用超出了纯粹的美学目的。在刚性折纸图案中,折痕线包围的表面在折叠过程中不允许拉伸或弯曲。刚性折叠、平面折叠和可展的特性使刚性折纸结构具有广泛的潜在应用,作为一种基本的刚性折纸图案,miura折纸具有几何简单性和优异的机械性能,并能从运动学角度唯一地描述其运动,这种新颖的结构引起了研究人员的注意,并对这种结构的许多不同方面进行了研究。
4.由于折纸结构的可折叠性与特殊的力学性质,它可以作为如形状记忆合金丝之类的轻质、柔顺驱动材料的良好载体,组成具有移动能力的软体机器人。
技术实现要素:
5.为了克服现有技术的不足,本发明提供了一种基于子母折纸的形状记忆合金丝驱动软体机器人。
6.本发明提供了一种基于子母折纸的形状记忆合金丝驱动软体机器人,其特征在于,包括子母折纸主体和两根形状记忆合金丝,所述子母折纸主体由两个子结构、两个母结构组成。所述子结构和母结构均为折纸管结构,且所述折纸管结构是由两个完全相同的miura折纸基本单元组成的管状结构,折纸管结构关于中间四条折痕线组成的中间对称面左右对称,两侧管口呈菱形;所述子结构与母结构结构相同,子结构尺寸为母结构尺寸的0.5-0.7倍;
7.所述基于子母折纸的形状记忆合金丝驱动软体机器人采用如下方法制作:
8.1)两个母结构以相同的姿态排列,且使两个母结构各自的中间对称面、前后两侧的管壁面均处于竖直状态;将两个母结构紧靠,使两者互补的管壁面互相接触,且中间对称面共面;
9.2)上下颠倒其中一个母结构,仍使互补的管壁面接触且中间对称面共面;调整其中一个母结构的高度,使一个母结构两侧管口的右下角与另一个母结构两侧管口的左上角贴合,以此状态黏贴两个母结构使其相互固定;
10.3)在两个母结构的正下方以与母结构相同的姿态各自固定一个子结构,并使两个子结构互补的两个管壁面贴合固定;四个折纸管结构的中间对称面位于竖直平面且共面;
11.4)两个子结构在下,使两个子结构的三个顶点接触支撑面,放置该折纸主体,将此
朝向规定为正放;在两个母结构下表面的三个尖端处分别粘贴一块硅胶泡沫,使一根形状记忆合金丝穿过下表面的三个硅胶泡沫并呈u形;在两个母结构上表面的山线和两个尖端处分别粘贴一块硅胶泡沫,使一根形状记忆合金丝穿过上表面的三个硅胶泡沫并呈w形。
12.作为本发明的优选方案,所述子结构尺寸为母结构尺寸的0.6倍。
13.作为本发明的优选方案,所述形状记忆合金丝与折纸主体的固定点之间设置有硅胶泡沫,硅胶泡沫固定在折纸主体的固定点上形状记忆合金丝穿过硅胶泡沫进行固定。
14.作为本发明的优选方案,母结构下表面的形状记忆合金丝的长度要满足在穿过下表面的全部硅胶泡沫后,头尾两端能在折纸主体正放于水平面上时触地。
15.作为本发明的优选方案,母结构上表面的形状记忆合金丝长度要满足在穿过上表面全部硅胶泡沫后,头尾两端的余量足够绕连接电源用的导线。
16.作为本发明的优选方案,两根形状记忆合金丝外接电源,且两根形状记忆合金丝交替接受电信号。
17.作为本发明的优选方案,两根形状记忆合金丝在无约束且通电状态下呈直线形。
18.作为本发明的优选方案,形状记忆合金丝的u形结构或w形结构关于折纸主体的中间对称面对称。
19.作为本发明的优选方案,所述的形状记忆合金丝为0.5mm单程的形状记忆合金丝,优选为sma丝。
20.与现有技术相比,本发明的机器人由两对尺寸不同的miura折纸管组成的子母折纸,具有显著的抗弯、抗扭能力,从而只能在折叠方向上发生明显的变形,因而有利于接受形状记忆合金丝的驱动,产生定向的变形。并且本发明对形状记忆合金丝u形的特殊布置方式可以有效地将形状记忆合金丝产生的力转化为使折纸结构折叠的力,从而完成折纸结构整体的驱动。子母折纸结构特殊的支撑方式也保证了机器人站立的平稳性,并提供有助于移动的各向异性摩擦机制。
附图说明
21.图1为本发明子母折纸主体的结构示意图(侧视视角);
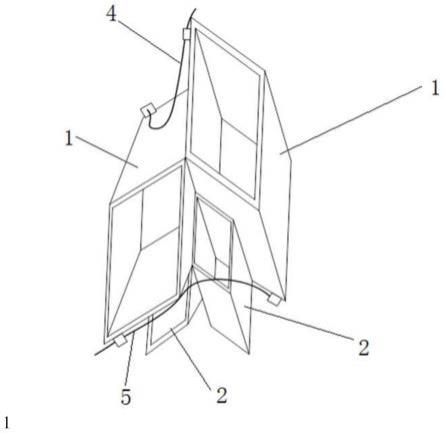
22.图2为本发明基于子母折纸的形状记忆合金丝驱动软体机器人的结构示意图;
23.图3为本发明基于子母折纸的形状记忆合金丝驱动软体机器人的底部结构示意图;
24.图4为本发明基于子母折纸的形状记忆合金丝驱动软体机器人压缩状态示意图;
25.图5为本发明子、母结构制作示意图。
26.图中,母结构1、子结构2、硅胶泡沫3、顶部sma丝4、底部sma丝5。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用
于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
29.如图1-5所示,本实施例提供了一种基于子母折纸的形状记忆合金丝驱动软体机器人,其包括子母折纸主体和两根sma丝,如图1所示,所述子母折纸主体由两个子结构2、两个母结构1组成。所述子结构2和母结构1均为折纸管结构,且所述折纸管结构是由两个完全相同的miura折纸基本单元组成的管状结构(图5所示),折纸管结构关于中间四条折痕线组成的中间对称面左右对称,两侧管口呈菱形;所述子结构与母结构结构相同,子结构尺寸为母结构尺寸的 0.6倍。
30.如图5所示,子、母结构可以采用如下方法制作:1)用激光雕刻机分别雕刻出已规划设计的组成子结构的4个miura基本单元以及组成母结构的4个 miura基本单元的折痕线,其折痕图如图5(a)所示,其中,组成子结构的 miura基本单元尺寸是母结构的miura基本单元的0.6倍;2)折叠折痕,使 miura基本单元从二维结构变化为三维结构;3)将两相同的miura基本单元镜像接合成一个管状结构,边缘向内折叠,以便于连接。
31.如图1-5所示,在一个可选的实施例中,所述基于子母折纸的形状记忆合金丝驱动软体机器人采用如下方法制作:
32.1)两个母结构以相同的姿态排列,且使两个母结构各自的中间对称面、前后两侧的管壁面均处于竖直状态;将两个母结构紧靠,使两者互补的管壁面互相接触,且中间对称面共面;
33.2)上下颠倒其中一个母结构,仍使互补的管壁面接触且中间对称面共面;调整其中一个母结构的高度,使一个母结构两侧管口的右下角与另一个母结构两侧管口的左上角贴合,以此状态黏贴两个母结构使其相互固定;
34.3)在两个母结构的正下方以与母结构相同的姿态各自固定一个子结构,并使两个子结构互补的两个管壁面贴合固定;四个折纸管结构的中间对称面位于竖直平面且共面;
35.4)两个子结构在下,使两个子结构的三个顶点接触支撑面,放置该折纸主体,将此朝向规定为正放(子母折纸结构特殊的支撑方式也保证了机器人站立的平稳性,并提供有助于移动的各向异性摩擦机制);在两个母结构下表面的三个尖端处分别粘贴一块硅胶泡沫3,使一根底部sma丝5穿过下表面的三个硅胶泡沫并呈u形;在两个母结构上表面的山线和两个尖端处分别粘贴一块硅胶泡沫3,使一根顶部sma丝4穿过上表面的三个硅胶泡沫并呈w形。
36.温控形状记忆合金丝在加热时会产生相变以及变形,从而对其上的约束部分产生力。如图2与3,本发明完成了由形状记忆合金丝构成的柔顺的双程执行器,图4为本发明基于子母折纸的形状记忆合金丝驱动软体机器人压缩状态示意图。在由可编程电源产生的周期性电信号的加热下,一对形状记忆合金丝分别产生相应的热信号,折纸结构因此具备折叠-展开的周期性行为,而并不会因为形状记忆合金丝的力产生不希望的形式的形变。而机器人爬行时,其装配的形状记忆合金丝与地面接触部分刚度的变化可以创造各向异性摩擦机制,在这种摩擦机制的帮助下机器人将产生定向的运动。本发明将机器人放置于光滑、平整的地面并施加电信号,机器人以周期性的行为爬行。
37.本发明将两根sma丝分别与两电源相连,每根sma丝的头尾两端与同一个电源的正负极相连。打开母结构下表面的底部sma丝5所连电源,则该 sma丝通电变直,由于折纸结构
底面的摩擦力各向异性,机器人头部得以向前而尾部不动;关闭该电源,打开母结构上表面的顶部sma丝4所连电源,则该 sma丝通电变直,由于折纸结构底面的摩擦力各向异性,机器人尾部得以向前而头部不动,交替并周期性的使底部sma丝5和顶部sma丝4通电,从而机器人得以向前运动。
38.如图1所示,本实施例展现了一种结构简单但具有功能性力学性能的折纸结构——子母折纸,它具有特殊的力学性能如强抗弯能力、抗扭转能力以及稳定的站立能力;子母折纸的力学性能不仅能为机器人服务,也具有更广泛的应用。
39.本发明通过合理设计折纸结构,将能够简单地引导柔顺的执行机构(如形状记忆合金丝)对结构产生定向的力,完成指定的驱动行为。通过实验,本发明已经证明了这种方法能够应用于软体机器人物理结构与执行机构的设计,并实现具有自主移动能力的软体机器人。该成果拓展了软体机器人结构设计方法,为基于折纸的软体机器人的设计提供了一种新的思路。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1