一种多臂协同柔索越障作业机器人的制作方法
1.本发明属于机器人技术领域,具体涉及一种多臂协同柔索越障作业机器人。
背景技术:
2.柔索作为一类特殊的工程结构应用于架空索道、桥梁和土建工程等具有一定跨度的结构。柔索由于长期暴露于野外,难免会产生断股、松股、生锈、移位、雷击、污秽、磨损以及柔索上的金具氧化腐蚀问题,从而引发安全事故,给人民生活和工业企业造成巨大的经济损失。因此要定期对柔索进行巡查和维护,以保证安全运行。
3.早期的柔索巡检方式主要靠的是人工巡检和直升机巡检。人工巡检的劳动强度大,地面人员距离柔索远,检测精度低,大风大雾环境等恶劣环境下无法巡检;直升机巡检方式需要培养飞行员,作业程序繁琐,成本较高。
4.机器人巡检方式是以柔索作为作业路径,可近距离接近柔索,通过自身携带传感器来检测柔索的破损情况,大大提高了检测质量,但目前大多数巡检机器人具有结构复杂、越障能力有限、爬坡能力差等缺陷,为柔索的巡检带来了不便。
技术实现要素:
5.针对上述现有技术遇到的问题,本发明提出了一种多臂协同柔索越障作业机器人,设计合理,解决了现有技术的不足,具有良好的效果。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种多臂协同柔索越障作业机器人,包括框架式箱体,框架式箱体顶部设有滑移摆动机构,滑移摆动机构连接有前运动手臂、中运动手臂以及后运动手臂;
8.前运动手臂和后运动手臂对称设置于框架式箱体前后两侧,前运动手臂包括运动手臂底板、直驱式滚轮机构、压索机构、第一摆动机构以及第一升降机构;运动手臂底板上铰接有运动手臂骨架,运动手臂骨架包括竖板和两个侧板,侧板内壁设有两个传感器,用于检测柔索上的障碍物;直驱式滚轮机构和压索机构固定在运动手臂骨架上,直驱式滚轮机构能够驱动机器人在柔索上行走,压索机构能够与直驱式滚轮机构配合压紧柔索;第一升降机构设置于运动手臂底板下方,用于调节直驱式滚轮机构和压索机构的高度;第一摆动机构能够驱动手运动手臂骨架转动;
9.中运动手臂设置于框架式箱体内部,包括抱索机构和第二升降机构,抱索机构设置于第二升降机构顶部,第二升降机构可驱动抱索机构移动至滑移摆动机构上方,抱索机构用于握紧柔索;
10.滑移摆动机构包括滑动机构和两个第二摆动机构,滑动机构能够使中运动手臂和框架式箱体前后移动,第二摆动机构能够使前后运动手臂在水平面内转动。
11.进一步地,直驱式滚轮机构通过固定架与运动手臂骨架固定,直驱式滚轮机构包括滚轮和直驱式电机,直驱式电机输出轴通过滚轮轮毂与滚轮转动轴固定连接。
12.进一步地,压索机构包括自锁电机、连接块、辅助轮、辅助轮转动轴以及轴承,自锁
电机输出轴通过连接块与辅助轮阶梯轴一端螺纹连接,辅助轮阶梯轴另一端通过轴承与辅助轮转动连接。
13.进一步地,第一摆动机构包括电动推杆和电动推杆安装座,电动推杆一端通过电动推杆安装座固定在运动手臂底板上,另一端通过电动推杆安装座固定在运动手臂骨架的竖板内侧;
14.运动手臂底板上设有铰接支架,运动手臂骨架通过卡簧柱销与铰接支架铰接,当电动推杆伸出时,运动手臂骨架带动直驱式滚动结构和压索机构绕卡簧柱销左右转动。
15.进一步地,第一升降机构和第二升降机构均包括方管、升降电机、导向块以及伸缩圆筒,升降电机底部通过方管底座与方管连接,升降电机顶部输出轴连接有丝杆,丝杆上螺纹设置丝杆螺母;伸缩圆筒套设在丝杆上,一端通过导向块与丝杆螺母连接,另一端与运动手臂底板下端连接。
16.进一步地,抱索机构包括两个抱索手抓和手抓开合电机,每个抱索手抓均包括弧形夹持部和开合部;弧形夹持部内侧设有用于夹紧柔索的橡胶垫,两个弧形夹持部上端设有相互交错分布的爪齿,下端与开合部连接;两个抱索手抓的开合部之间通过锯齿啮合连接;手抓开合电机驱动一个抱索手抓转动,使两个抱索手抓作相向或相离运动。
17.进一步地,两个抱索手抓的开合部之间设有充电插头。
18.进一步地,滑动机构包括两根导向光轴、两个导向光轴固定座、滑动齿轮、锯齿轨道以及滑动电机,两个导向光轴固定座分别设置于框架式箱体顶部前后两端,两根导向光轴和锯齿轨道平行固定在两个导向光轴固定座之间,每根导向光轴上分别滑动套设有若干个滑块,滑块底部与框架式箱体固定连接;框架式箱体上设有滑动齿轮,滑动齿轮与锯齿轨道啮合连接,滑动电机驱动滑动齿轮转动。
19.进一步地,第二摆动机构包括摆动电机、摆动小齿轮、摆动大齿轮以及转动连接板,摆动小齿轮和摆动大齿轮固定在导向光轴固定座上,两者啮合连接,摆动电机驱动摆动小齿轮转动;转动连接板一端底部与摆动大齿轮顶部固定连接,另一端底部与第一升降结构中方管固定连接,转动连接板上设有供伸缩圆筒穿过的通孔。
20.进一步地,框架式箱体内设有控制系统,箱体外侧固定有柔索检测设备,柔索检测设备包括摄像头、红外线探测仪以及信号收发器,摄像头与红外线探测仪通过信号收发器连接。
21.本发明所带来的有益技术效果为:
22.1、越障能力强;前后滚动轮采用大功率的直驱式电机驱动,当遇到障碍物时,通过升降机构、摆动机构、抱索机构,机器人前中后运动手臂可以随时自由灵活的脱离柔索,从而实现越障。
23.2、安全稳定性好;设有前中后三个运动手臂,在行走和越障过程中可保证至少同时有两个运动手臂在柔索上,同时,在抱索手抓开合部位设有充电插头可使机器人完成在线充电,大大提高了机器人在柔索上的安全稳定性。
24.3、适用于大弧垂柔索;前后滚轮采用直驱式盘式电机,动力损耗小,并设有辅助压索机构,当机器人爬坡时,自锁电机带动辅助轮使其压紧柔索,增大了柔索与滚动轮的摩擦力,从而大大提高了爬坡能力。
25.4、控制简单,检测精度高;越障时可实现自主控制,越障时间短,设有摄像头与红
外线探测仪可以将柔索的监测信息通过图像的形式实时的传到地面基站,巡检精度高。
附图说明
26.下面结合附图对本发明做进一步说明:
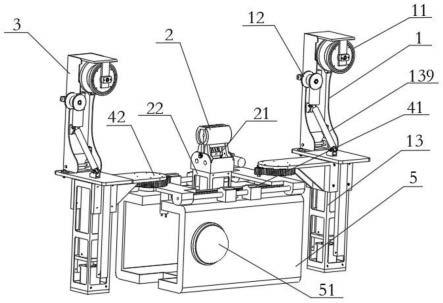
27.图1为本发明中多臂协同柔索越障作业机器人的结构示意图;
28.图2为本发明中多臂协同柔索越障作业机器人与柔索配合使用的结构示意图;
29.图3为本发明中直驱式滚轮机构的剖视图;
30.图4为本发明中压索机构的剖视图;
31.图5为本发明中直驱式滚轮机构、压索机构以及第一摆动机构的结构立体图;
32.图6为本发明中升降机构的结构示意图;
33.图7为本发明中升降机构的分解示意图;
34.图8为本发明中抱索机构为闭合状态时的结构示意图;
35.图9为本发明中抱索机构为打开状态时的结构示意图;
36.图10为本发明中充电插头的结构示意图;
37.图11为本发明中滑移摆动机构和框架式箱体配合的结构示意图;
38.图12为本发明中滑动结构和框架式箱体配合的侧面剖视图;
39.其中:1-前运动手臂;11-直驱式滚轮机构;111-运动手臂骨架;112-固定架;113-滚轮;114-直驱式电机;115-挡板;116-滚轮转动轴;117-轮毂;118-带座轴承;119-传感器;12-压索机构;121-自锁电机;122-连接块;123-辅助轮;124-辅助轮阶梯轴;125-轴承;126-卡簧;
40.13-升降机构;131-升降电机;132-丝杆;133-丝杆螺母;134-导向块;135-方管;136-方管底座;137-伸缩圆筒;138-运动手臂底板;139-第一摆动机构;1391-电动推杆;1392-电动推杆安装座;1393-铰接支架;1394-卡簧柱销;1395-锁紧挡圈;
41.2-中运动手臂;21-抱索机构;211-抱索手抓;2111-夹持部;2112-开合部;212-橡胶垫;213-手抓开合电机;214-抱索底座;215-空心光轴;216-充电插头;2161-电极块;2162-电极块固定座;2163-电极块导向座;
42.4-滑移摆动机构;41-滑动机构;411-滑动电机;412-锯齿轨道;413-滑动齿轮;414-导向光轴;415-导向光轴固定座;416-滑块;42-第二摆动机构;421-摆动小齿轮;422-摆动大齿轮;423-转动连接板;
43.5-框架式箱体;51-柔索检测设备;
44.6-柔索;7-障碍物;
具体实施方式
45.本发明提出了一种多臂协同柔索越障作业机器人,为了使本发明的优点、技术方案更加清楚、明确,下面结合具体实施例对本发明做详细说明。
46.如图1-2所示,一种多臂协同柔索越障作业机器人,包括框架式箱体5,框架式箱体5顶部设有滑移摆动机构4,滑移摆动机构4连接有前运动手臂1、中运动手臂2以及后运动手臂;
47.前运动手臂1和后运动手臂对称设置于框架式箱体5前后两侧,前运动手臂1和后
运动手臂结构完全一致,前运动手臂1包括运动手臂底板138、直驱式滚轮机构11、压索机构12、第一摆动机构139以及第一升降机构13;运动手臂底板138上通过铰接支架1393铰接有运动手臂骨架111,运动手臂骨架111包括竖板和两个侧板,直驱式滚轮机构11和压索机构12固定在运动手臂骨架111上,压索机构12位于直驱式滚轮机构11斜下方,直驱式滚轮机构11能够驱动机器人在柔索上行走,压索机构12能够与直驱式滚轮机构11配合压紧柔索;第一升降机构13设置于运动手臂底板138下方,用于调节直驱式滚轮机构11和压索机构12的高度;第一摆动机构139能够驱动运动手臂骨架111转动;前运动手臂骨架111侧板内壁上设有两个传感器119。
48.中运动手臂2设置于框架式箱体5内部,包括抱索机构21和第二升降机构13,抱索机构21设置于第二升降机构13顶部,第二升降机构13可驱动抱索机构21移动至滑移摆动机构4上方,抱索机构21用于握紧柔索6;
49.滑移摆动机构4包括滑动机构41和两个第二摆动机构42,滑动机构41能够使中运动手臂2和框架式箱体5前后移动,第二摆动机构42能够使前后运动手臂在水平面内转动。
50.如图3所示,直驱式滚轮机构11通过固定架112与运动手臂骨架111固定,固定架112包括横向部和设置在横向部下方的两个竖向部,直驱式滚轮机构11固定在两个竖向部之间;直驱式滚轮机构11包括滚轮113和直驱式电机114,直驱式电机114固定在内竖向部上,其输出轴通过滚轮轮毂117与滚轮转动轴116一端连接,滚轮轮毂117上嵌设有挡板115,外竖向部外侧固定有带座轴承118,滚轮转动轴116另一端穿过挡板115和外竖向部与带座轴承118滑动连接。当直驱式电机114通电转动时,通过轮毂117传递动力从而带动滚轮113转动,滚轮113转动与柔索6发生摩擦产生驱动力从而使得机器人沿柔索行走。
51.如图4所示,压索机构12包括自锁电机121、连接块122、辅助轮123、辅助轮阶梯轴124、轴承125以及卡簧126,自锁电机121固定在运动手臂骨架111侧板内壁,输出轴穿过该侧板与连接块122连接,辅助轮阶梯轴124一端与连接块122螺纹连接,另一端通过两个轴承125与辅助轮123转动连接,两个轴承125一端抵住辅助轮阶梯轴124台阶处,另一端通过卡簧126定位。通过自锁电机121带动辅助轮123转动增大滚轮113与柔索6之间的摩擦力,从而减少了打滑现象的发生。自锁电机能够通过驱动连接块旋转从而使辅助轮阶梯轴从图4中所示水平位置向下转动90
°
至垂直位置,从而带动辅助轮也从水平位置向下转动90
°
。
52.如图5所示,第一摆动机构139包括电动推杆1391和电动推杆安装座1392,电动推杆1391一端通过电动推杆安装座1392固定在运动手臂底板138上,另一端通过电动推杆安装座1392固定在运动手臂骨架111的竖板内侧。
53.铰接支架1393包括一个底板和设置在底板上的两个竖向部,底板固定在运动手臂底板138上,运动手臂骨架111的两个侧板下端通过卡簧柱销1394与两个竖向部铰接,卡簧柱销1394上套接有两个锁紧挡圈1395,当电动推杆1391伸出时,运动手臂骨架111带动直驱式滚动结构和压索机构12绕卡簧柱销1394转动。
54.如图6-7所示,第一升降机构13和第二升降机构13均包括方管135、升降电机131、导向块134以及伸缩圆筒137,方管135底部固定有方管底座136,方管底座136上固定有升降电机131,升降电机131顶部输出轴连接有丝杆132,丝杆132上螺纹设置丝杆螺母133,丝杆螺母133外套设有导向块134,伸缩圆筒137套设在丝杆132上,一端与导向块134连接,另一端与运动手臂底板138下端连接。升降电机131带动丝杆132转动,丝杆132上的丝杆螺母133
随着丝杆132转动从而带着导向块134向上移动,由于伸缩圆筒137下端与导向块134连接,上端与运动手臂底板138连接,运动手臂底板138上又设有直驱式滚轮机构11,从而可使得直驱式滚轮机构11上移,达到滚轮脱离柔索6的目的。
55.如图8所示,抱索机构21包括两个抱索手抓211、手抓开合电机213以及抱索底座214,每个抱索手抓211均包括一个弧形夹持部、第一开合部以及第二开合部,弧形夹持部内侧设有用于夹紧柔索6的橡胶垫212,两个弧形夹持部上端设有相互交错分布的爪齿,下端均与第一和第二开合部连接,两个抱索手抓211的第一开合部之间、第二开合部之间分别通过锯齿啮合连接;两个抱索手抓211的开合部底部固定在抱索底座214上,手抓开合电机213固定在底座上,手抓开合电机213的输出轴与其中一个抱索手抓211的第一和第二开合部固定连接,手抓开合电机213驱动该抱索手抓211转动,使两个抱索手抓211作相向或相离运动。
56.如图9-10所示,任意一个抱索手抓211的第一开合部和第二开合部之间连接有空心光轴215,两个抱索手抓211之间还设有一个固定在抱索底座214上的空心光轴215,充电插头216穿插在中间的空心光轴215上,从而固定在两个抱索手抓211中间;充电插头216包括两个电极块2161、电极块固定座2162以及电极块导向座2163,电极块导向座2163顶部通过电极块固定座2162与两个电极块2161相连,电极块导向座2163上开设有供空心光轴穿过的圆孔,电极块固定座2162下端固定在抱索底座214上。
57.如图11所示,滑动机构41包括两根导向光轴414、两个导向光轴固定座415、滑动齿轮413、锯齿轨道412以及滑动电机411,两个导向光轴固定座415分别设置于框架式箱体5顶部前后两端,两根导向光轴414和锯齿轨道412平行固定在两个导向光轴固定座415之间,每根导向光轴414上分别滑动套设有两个滑块416,滑块416底部与框架式箱体5固定连接;框架式箱体5上设有滑动齿轮413,滑动齿轮413与锯齿轨道412啮合连接,滑动电机411设置于框架式箱体5内部,输出轴穿过箱体顶部与滑动齿轮连接,滑动电机411驱动滑动齿轮413转动。滑动机构41的两个导向光轴固定座415上分别连接有第二摆动机构42。
58.如图12所示,第二摆动机构42包括摆动电机、摆动小齿轮421、摆动大齿轮422以及转动连接板423,摆动小齿轮421和摆动大齿轮422固定在导向光轴固定座415上,两者啮合连接;摆动电机设置于框架式箱体5内部,输出轴穿过箱体顶部与摆动小齿轮421连接,能够驱动摆动小齿轮421转动,转动连接板423一端底部与摆动大齿轮422顶部固定连接,另一端底部与第一升降结构中方管135固定连接,转动连接板上设有供伸缩圆筒137穿过的通孔。当摆动电机转动时,可通过两个齿轮之间的相互啮合,带动前运动手臂1或后运动手臂在水平面内转动。
59.框架式箱体5内设有控制系统,箱体外侧固定有柔索检测设备51,柔索检测设备51用于检测柔索的状况,柔索检测设备51包括摄像头、红外线探测仪以及信号收发器,摄像头与红外线探测仪通过信号收发器连接。柔索检测设备51、直驱式滚轮机构、压索机构、升降机构、摆动机构、滑动机构41、抱索机构以及控制系统均与框架式箱体5内部电连接。
60.本发明一种多臂协同柔索越障作业机器人设有三个运动手臂,当机器人在柔索6上行走,位于前运动手臂骨架111内壁上的传感器119检测到前方的障碍物7时,通过前运动手臂1,中运动手臂2,后运动手臂3的交替运动,可使的机器人跨过柔索6上的典型障碍,且在此越障的过程中可始终保持至少有两个运动手臂位于柔索6上,这大大提高了机器人的
安全稳定性。在机器人的前运动手臂1和后运动手臂3上各设有一个压索机构12,通过自锁电机121带动辅助轮阶梯轴124转动,可使得辅助轮123调整压紧柔索的程度,增大滚轮113和辅助轮123与柔索6之间的摩擦力,进而提高机器人的爬坡能力,使得机器人可以在大弧垂条件下行走。机器人横向滑移平台4上设有滑动机构41,框架式箱体5和中运动手臂2可以在横向上滑动,从而调节机器人的重心位置,提高越障式时的稳定性。机器人抱索机构21内部开合位置设有充电插头216,可使得机器人在柔索6上完成充电,从而给各设备供电。提高了机器人的可靠性。
61.该多臂协同柔索越障作业机器人具体实施方式如下:
62.当机器人在正常平坡柔索上行走时,仅需要前运动手臂1中的直驱式电机114转动,从而带动滚轮113转动,实现机器人在柔索6上行走;当遇到雨雪天气或是上坡柔索时,需要前运动手臂1和后运动手臂中的两个直驱式电机114同时转动,增加机器人前进的驱动力,同时为了防止滚轮113与柔索之间发生打滑,自锁电机121带动辅助轮阶梯轴124转动至水平位置,使辅助轮123压紧柔索,从而增大滚轮113和辅助轮123与柔索之间的摩擦力,减少打滑。
63.当机器人在柔索6上行走时,位于前运动手臂骨架111侧板内壁上的传感器119检测到前方的障碍物7时(这里以柔索上的典型障碍物悬垂线夹为例),自锁电机121带动辅助轮阶梯轴124转动至垂直位置,使辅助轮123脱离柔索,滑动机构41中的滑移电机转动,使框架式箱体5和中运动手臂2左移,随后第二升降机构13驱动抱索机构21随伸缩圆筒137上移,此时手抓开合电机213控制抱索手抓211的两个夹持部张开,当抱索机构21上移到指定位置时,两个夹持部闭合,使抱索机构21握紧柔索6。随后,前运动手臂1的第一升降机构13驱动直驱式滚轮机构11随伸缩圆筒137上移,达到滚轮113脱离柔索6的目的。随后,第一摆动机构139中的电动推杆1391伸出,前运动手臂骨架111绕卡簧柱销1394向左转动一定角度从而避开障碍物7;当第一摆动机构139无法使前运动手臂1避开障碍物7时,可启动第二摆动机构42,通过摆动小齿轮421和摆动大齿轮422的啮合转动,从而带动前运动手臂在水平面摆动一定角度,从而进一步远离障碍物7。随后,在后运动手臂中直驱式电机114的带动下机器人前行,使前运动手臂1越过障碍物7,通过第一升降机构13和第一摆动机构139使前运动手臂1重新挂索,前运动手臂1完成越障。接下来是中运动手臂2实现越障,首先抱索手抓211张开脱离柔索6,然后第二升降机构13驱动抱索机构21随伸缩圆筒137下移使其低于障碍物7,随后机器人前行,当中运动手臂2越过障碍物7后,抱索机构21上移,抱索手抓211闭合,使中运动手臂2重新挂索,至此中运动手臂2完成越障。随后在滑移机构的带动下,中运动手臂2和框架式箱体5右移,调节重心,并为后运动手臂留出空间。随后,后运动手臂进行越障动作,后运动手臂越障动作与前运动手臂1越障动作完全相同。
64.当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1