一种煤矿灾后救援机器人及其定位和通讯方法与流程
1.本发明涉及煤矿救援机器人技术领域,具体公开了一种煤矿灾后救援机器人及其定位和通讯方法。
背景技术:
2.煤矿灾害如瓦斯爆炸、透水、冒顶等事故,严重威胁煤矿工人的生命安全。发生煤矿灾害后,救援人员直接进入灾区具有极大的风险,面临二次灾害带来的威胁。采用煤矿灾后救援机器人替代人工开展救援,可以避免人员直接进入危险环境带来的风险,利用搭载的传感器和通讯设备,可以快速传输井下的甲烷、一氧化碳、氧气、风速等关键参数以及视频、点云模型等巷道灾后环境情况到地面救援中心,实现远程决策救援。
3.煤矿灾后救援机器人的定位对于灾后救援具有重要作用,是救援人员进行科学决策、合理救援路线规划的前提。然而,当前井下机器人的定位,尤其是灾后环境机器人的定位,尚无有效可行的解决方案。煤矿灾害事故发生后,所有预先安装的电气设备必须全部断电,因此机器人无法依赖巷道中原有的需要供电的有线、无线定位设备。对于塌方、透水等恶劣工况,巷道原有的矿图不再准确,不能作为精确的先验知识直接使用。目前地面及其他环境的探测救援机器人,通常采用里程计惯性导航等航迹推算方法、激光视觉等传感器slam(同步定位与地图构建)方法、不同类型无线传感器定位等方法。然而,这类通用定位方法,没有针对煤矿灾后环境和救援机器人的运行特点进行设计,无法满足灾后机器人的高精度、高可靠性定位的实际需求。
4.煤矿机器人的可靠通讯也是一个关键问题,直接关系和影响到机器人的生存能力和救援效率与能力。国内外已经开发的煤矿救援机器人通常采用光纤、电缆等进行有线通讯,对于环境复杂的灾后环境容易被牵绊而且不易回收。灾害发生后,无法使用原有的无线通讯基站,且灾后复杂巷道环境也给救援机器人的无线通讯带来巨大挑战。地面移动机器人目前也出现了采用多个无线中继接力通讯的方案,但是抛投策略过于粗放、无法实现有效通讯链路的可靠建立,且无法实现通讯节点的回收。现有煤矿机器人通常采用有线电缆或光纤进行通讯,灾后复杂环境和地形容易导致线缆缠绕、断裂,机动性受到制约。
技术实现要素:
5.有鉴于此,为了解决煤矿灾后复杂巷道环境下救援机器人的定位和通讯问题,本发明的目的在于提供一种煤矿灾后救援机器人定位通讯系统及方法。
6.为达到上述目的,首先本发明提供一种煤矿灾后救援机器人,包括履带式防爆机器人本体、履带底盘、多自由度机械臂伺服抓取系统、中继模块释放回收机构、环境信息采集模块,所述的多自由度机械臂伺服抓取系统、中继模块释放回收机构、环境信息采集模块安装在防爆机器人本体上;所述中继模块释放回收机构可以主动释放无线定位通讯中继模块到行走途径的巷道路面上;
7.履带式防爆机器人本体包含电气设备隔爆腔、电池腔、接线腔、无线定位通讯中继
模块储藏腔、本安设备腔,所述电气设备隔爆腔包括边缘计算单元、交换机、滚珠丝杠电机,滚珠丝杠电机的电机轴通过轴套穿过防爆腔壁内的铜套后与外部丝杠连接,满足旋转防爆结合面设计要求;所述本安设备腔布置双向通信音箱、多合一气体传感器、机器人载网桥,其中机器人载网桥实现与抛掷到地面的无线定位通讯中继模块双向通信;
8.环境信息采集模块包括多线激光雷达、调频连续波激光雷达、4d毫米波雷达、多模态摄像头,所述多线激光雷达具有多次回波功能,可以穿透水汽、粉尘、烟雾获得多次回波,采集全部点云数据;所述调频连续波激光雷达采集小于设定阈值范围内的点云数据;所述4d毫米波雷达采集大于设定阈值范围内的点云数据;所述多模态摄像头同时获取rgb图像、红外图像以及深度图,通过识别无线定位通讯中继模块上的二维码确定无线定位通讯中继模块相对于机械臂的姿态;
9.多自由度机械臂伺服抓取系统包括多自由度防爆机械臂、双目视觉红外相机、简易机械手,所述的多自由度防爆机械臂利用环境信息采集模块的多模态摄像头和双目视觉红外相机,识别和定位目标,进行视觉伺服控制,抓取地面上的无线定位通讯中继模块,放置到履带式防爆机器人本体的无线定位通讯中继模块储藏腔中的指定位置;
10.中继模块释放回收机构包括丝杠、丝杠螺母、导轨、弹性阻隔门,所述丝杠通过丝杠螺母将滚珠丝杠电机的旋转运动转化为丝杠螺母连接的无线定位通讯中继模块在导轨上的水平移动,实现无线定位通讯中继模块的正向释放和反向回收;所述弹性阻隔门利用可调刚度的扭簧设置关门弹力,实现中继释放掉落过程的水平掉落方向控制;
11.无线定位通讯中继模块集成13dbi 120
°
双极化扇区天线,双模块一体化设计,发射功率满足矿用本质安全型要求,无线定位通讯中继模块利用机械手抓取进行回收,利用丝杠螺母推动进行释放,通过判断信号质量自动控制中继模块释放回收机构,实现无线中继模块的全自动释放和回收。
12.特别的,所述调频连续波激光雷达和所述4d毫米波雷达的设定阈值为50米。
13.特别的,所述双极化扇区天线的发射功率为1w。
14.同时,本发明还提供一种煤矿灾后救援机器人的通讯方法,包含以下步骤:
15.步骤s11:机器人开始救援任务后,基于已有灾害区域位置的先验知识和矿图,自主规划行进路线,确定携带无线中继模块的数量,利用人工装载或远程遥控多自由度机械臂伺服抓取系统装载满足应用需求的中继模块后出发;
16.步骤s12:实时监测机器人本体内部通讯模块节点与上位机遥控端的通讯模块节点之间的带宽、延时及通讯链路路径,根据预先设定的最小阈值判断是否到达需要部署新节点的位置;
17.步骤s13:当满足新节点部署条件后,利用中继模块释放回收机构自主释放无线通讯中继模块,待掉落到地面后,利用软件唤醒掉落到地面的新节点,开始自组网接力通讯;
18.步骤s14:机器人执行救援任务的返航过程中,利用多自由度机械臂伺服抓取系统,通过环境信息采集模块的多模态摄像头和双目视觉红外相机自动识别和定位张贴于无线定位通讯中继模块表面的二维码,进行视觉伺服闭环控制,抓取地面上的无线定位通讯中继模块并放置到履带式防爆机器人本体的无线定位通讯中继模块储藏腔中的指定位置;
19.步骤s15:回收中继完成后,利用软件远程关闭回收的新节点,避免节点距离过近导致的信号干扰。
20.进一步的,本发明还提供一种煤矿灾后救援机器人的定位方法,包含以下步骤:
21.步骤s21:机器人行进过程中,基于所述环境信息采集模块,利用多线激光雷达、调频连续波激光雷达、4d毫米波雷达、多模态摄像头识别巷道中的路标,与先验地图进行对比,确定人工路标的不确定度;所述人工路标部署在巷道中固定的设备和道路标志上,利用人工路标绝对位姿测量方法实现其在世界坐标系下的精确位姿测量;
22.步骤s22:将多线激光雷达、调频连续波激光雷达、4d毫米波雷达、多模态摄像头各自slam的结果构建相对位姿约束因子,根据特征稳定性设定协方差,确定不确定度;利用识别到的自然路标构建绝对位姿约束因子,根据先验知识设定协方差,确定不确定度;
23.步骤s23:利用基于因子图优化的多传感器融合定位方法,基于权重自适应的最小二乘优化方法,求解定位结果。
24.特别的,所述人工路标包括人工设计的可以被视觉传感器、激光雷达识别并获得传感器位姿的标志,包括激光二维码、视觉二维码。
25.本方案充分利用灾后巷道的可用信息、结合机器人实际运行状态、自主科学部署定位通讯节点、实现节点的自动回收、定位和通讯功能。
26.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
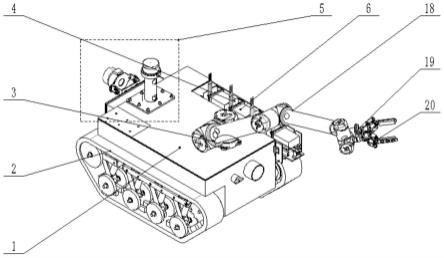
27.图1为本发明煤矿灾后救援机器人结构示意图(正视);
28.图2为本发明煤矿灾后救援机器人结构示意图(后视);
29.图3为本发明煤矿灾后救援机器人结构示意图(仰视);
30.图4为本发明煤矿灾后救援机器人局部放大结构示意图。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
33.如图1-4所示,一种煤矿灾后救援机器人,包括履带式防爆机器人本体(1)、履带底盘(2)、多自由度机械臂伺服抓取系统(3)、中继模块释放回收机构(4)、环境信息采集模块(5)。所述的多自由度机械臂伺服抓取系统(3)、中继模块释放回收机构(4)、环境信息采集模块(5)安装在防爆机器人本体上,所述中继模块释放回收机构(4)可以主动释放无线定位通讯中继模块(6)到行走途径的巷道路面上。
34.履带式防爆机器人本体(1)包含电气设备隔爆腔(7)、电池腔(8)、接线腔(9)、无线定位通讯中继模块储藏腔(10)、本安设备腔(11)。所述电气设备隔爆腔包括边缘计算单元、
交换机、滚珠丝杠电机(12),所述滚珠丝杠电机的电机轴通过轴套穿过防爆腔壁内的铜套后与外部丝杠(13)连接,满足旋转防爆结合面设计要求;所述本安设备腔布置双向通信音箱、多合一气体传感器、机器人载网桥,所述机器人载网桥实现与抛掷到地面的无线定位通讯中继模块双向通信。
35.环境信息采集模块(5)包括多线激光雷达(14)、调频连续波激光雷达(15)、4d毫米波雷达(16)、多模态摄像头(17)。所述多线激光雷达(14)具有多次回波功能,可以穿透水汽、粉尘、烟雾获得多次回波,采集全部点云数据;所述调频连续波激光雷达(15)具备局部高精度测量特点,仅采集小于设定阈值δ(典型值50m)范围内的点云数据;所述4d毫米波雷达(16)具备远距离高精度动态测量能力,仅采集大于设定阈值δ(典型值50m)范围内的点云数据;所述多模态摄像头(17)同时获取rgb图像、红外图像以及深度图,通过识别无线定位通讯中继模块(6)上的二维码确定无线定位通讯中继模块相对于机械臂的姿态。
36.多自由度机械臂伺服抓取系统(3)包括多自由度防爆机械臂(18)、双目视觉红外相机(19)、简易机械手(20)。所述的多自由度防爆机械臂(18)可以利用环境信息采集模块的多模态摄像头(17)和双目视觉红外相机(19),识别和定位目标,进行视觉伺服控制,抓取地面上的无线定位通讯中继模块(5),放置到履带式防爆机器人本体的无线定位通讯中继模块储藏腔(10)中的指定位置。
37.中继模块释放回收机构(4)包括丝杠(13)、丝杠螺母(21)、导轨(22)、弹性阻隔门(23)组成。丝杠(13)通过丝杠螺母(21)将滚珠丝杠电机(12)的旋转运动转化为丝杠螺母(21)连接的无线定位通讯中继模块(5)在导轨(22)上的水平移动,实现无线定位通讯中继模块的正向释放和反向回收;所述弹性阻隔门(23)利用可调刚度的扭簧设置关门弹力,实现中继释放掉落过程的水平掉落方向控制。
38.无线定位通讯中继模块(5)集成13dbi 120
°
双极化扇区天线,双模块一体化设计,发射功率1w满足矿用本质安全型要求。无线定位通讯中继模块(5)利用机械手抓取进行回收,利用丝杠螺母推动进行释放,通过判断信号质量自动控制中继模块释放回收机构,实现无线中继模块的全自动释放和回收。
39.同时,本发明还提供一种煤矿灾后救援机器人的通讯方法,包含以下步骤:
40.1)机器人开始救援任务后,基于已有灾害区域位置的先验知识和矿图,自主规划行进路线,确定携带无线中继模块的数量,利用人工装载或远程遥控多自由度机械臂伺服抓取系统(3)装载满足应用需求的中继模块后出发;
41.2)实时监测机器人本体内部通讯模块节点与上位机遥控端的通讯模块节点之间的带宽、延时及通讯链路路径,根据预先设定的最小阈值判断是否到达需要部署新节点的位置;
42.3)当满足新节点部署条件后,利用中继模块释放回收机构(4)自主释放无线通讯中继模块(5),待掉落到地面后,利用软件唤醒掉落到地面的新节点,开始自组网接力通讯;
43.4)机器人执行救援任务的返航过程中,利用多自由度机械臂伺服抓取系统(3),通过环境信息采集模块的多模态摄像头(17)和双目视觉红外相机(19)自动识别和定位张贴于无线定位通讯中继模块(5)表面的二维码,进行视觉伺服闭环控制,抓取地面上的无线定位通讯中继模块(5)并放置到履带式防爆机器人本体的无线定位通讯中继模块储藏腔(10)中的指定位置;
44.5)回收中继完成后,利用软件远程关闭回收的新节点,避免节点距离过近导致的信号干扰。
45.进一步的,本发明还提供一种煤矿灾后救援机器人的定位方法,包含以下步骤:
46.1)机器人行进过程中,基于所述环境信息采集模块(5),利用多线激光雷达(14)、调频连续波激光雷达(15)、4d毫米波雷达(16)、多模态摄像头(17)识别巷道中的路标,与先验地图进行对比,确定人工路标的不确定度;所述人工路标包括人工设计的可以被视觉传感器、激光雷达识别并获得传感器位姿的标志,包括激光二维码、视觉二维码,部署在巷道中固定的设备和道路标志上,利用人工路标绝对位姿测量方法实现其在世界坐标系下的精确位姿测量。
47.2)将多线激光雷达(14)、调频连续波激光雷达(15)、4d毫米波雷达(16)、多模态摄像头(17)各自slam的结果构建相对位姿约束因子,根据特征稳定性设定协方差,确定不确定度;利用识别到的自然路标构建绝对位姿约束因子,根据先验知识设定协方差,确定不确定度;
48.3)利用基于因子图优化的多传感器融合定位方法,基于权重自适应的最小二乘优化方法,求解定位结果。
49.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和本发明的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1