一种生长型多臂协同软体机器人
1.本发明涉及软体机器人领域,更具体的说是一种生长型多臂协同软体机器人。
背景技术:
2.目前,机器人领域的研究已逐渐工业化,越来越多的机器人投入到了工业岗位,他们不仅能代替人工完成重复性的、危险的工作,而且可以进入人工难以进入的狭小位置完成任务,这些工作要求机器人对工作环境有充足的适应性,并且能够完成复杂的操作任务。现有的工业机器人多是刚性机器人,可以完成精准的操作,为了实现复杂的尖端任务,也发展了多臂的刚体机器人系统,但是刚体机器人在其结构和材料上具有诸多限制,其驱动方式比较繁琐,刚性结构无法适应一些狭小复杂的工作环境,且极有可能对操作过程中的机器或人员造成损伤,因而发展了柔性机器人,突破了传统刚体机器人的设计理念,利用其柔性特征可以实现刚体机器人所不具有的功能,其中自生长的软体机器热利用尼龙薄膜材料作为主体,以气压驱动作为动力,利用内部气压驱动的薄膜的外翻实现尖端运动,利用其柔性特性可以进入狭小多变的环境进行勘测和检查,并在尖端完成指定的操作任务,但是目前的单臂生长型软体机器人能够完成的尖端操作是有限的,一些复杂的操作任务单靠单臂的机器人无法完成。因此我们需要一种新式的多臂机器人来克服两种机器人的缺点。
技术实现要素:
3.本发明的目的是提供一种生长型多臂协同软体机器人,可以结合单臂软体机器人和多臂刚体机器人的优点,完成不同需求的任务。
4.本发明的目的通过以下技术方案来实现:
5.一种生长型多臂协同软体机器人,包括多个检测机构,密封盒体和设置在密封盒体内部的多个储存卷筒,所述密封盒体上固定连接有多个软体机器人主体,每个软体机器人主体的尖端均连接有柔性盖,每个柔性盖上均设置有操作工具,每个软体机器人主体均内翻收纳在对应的储存卷筒上,多个软体机器人主体分别穿过多个检测机构;
6.所述密封盒体上固定连接有多个通管,多个软体机器人主体分别固定连接在多个通管上,密封盒体内部分隔成多个空间,多个储存卷筒分别位于多个空间内;
7.所述软体机器人主体是由尼龙薄膜制成的外翻筒状主体,软体机器人主体的一端密封,密封盒充气后软体机器人主体外翻生长;
8.所述柔性盖呈收口杯状,柔性盖的开口处设置有弹性绳,弹性绳收紧力使柔性盖能约束在软体机器人主体的尖端;
9.每个储存卷筒上均设置有驱动其进行转动的储存电机,储存电机固定连接在密封盒体上,检测机构包括滚轮ⅰ和滚轮ⅱ,滚轮ⅰ和滚轮ⅱ均转动连接在密封盒体上,滚轮ⅰ上连接有编码器,编码器固定连接在密封盒体上,编码器和上位机连接,上位机和储存电机连接;
10.每个软体机器人主体上均设置有多个关节,每个关节均由周向均匀分布的三个线
驱动单元构成。
11.本发明的有益效果为:
12.利用密封盒体安装多个软体机器人主体,多个条软体机器人主体分别携带不同的操作工具,在小环境下可以分别单独控制每个软体机器人主体完成不同任务,多个软体机器人主体也可以到达同一位置实现不同操作以完成同一件复杂的任务,多个软体机器人主体协同操作完成包络与回收。
附图说明
13.下面结合附图和具体实施方法对本发明做进一步详细的说明。
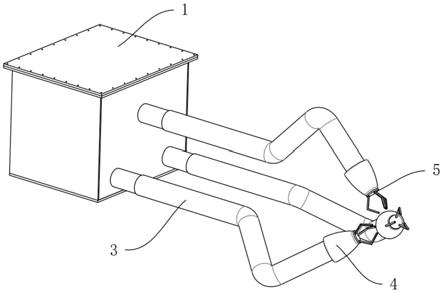
14.图1是本发明的生长型多臂协同软体机器人整体结构示意图;
15.图2是本发明的生长型多臂协同软体机器人内部俯视图结构示意图;
16.图3是本发明的生长型多臂协同软体机器人内部正视图结构示意图;
17.图4是本发明的柔性盖结构示意图;
18.图5是本发明的软体机器人尖端外翻生长运动原理示意图。
19.图6是本发明的软体机器人主体在线驱动单元作用下转弯运动原理示意图。
20.图中:密封盒体1;通管11;储存卷筒2;储存电机21;软体机器人主体3;柔性盖4;弹性绳41;操作工具5;检测机构6;滚轮ⅰ61;滚轮ⅱ62;编码器63。
具体实施方式
21.下面结合附图对本发明作进一步详细说明。
22.如图1至6所示,为了解决这一技术问题,下面对一种生长型多臂协同软体机器人的结构和功能进行详细的说明;
23.一种生长型多臂协同软体机器人,包括密封盒体1、储存卷筒2、软体机器人主体3、柔性盖4、操作工具5和检测机构6,储存卷筒2、软体机器人主体3、柔性盖4、操作工具5和检测机构6均设置有多个,储存卷筒2、软体机器人主体3、柔性盖4、操作工具5和检测机构6的数量相同;
24.所述密封盒体1上固定连接有多个软体机器人主体3,每个软体机器人主体3的尖端均连接有柔性盖4,每个软体机器人主体3均内翻收纳在对应的储存卷筒2上,密封盒体1内部分隔成多个空间,多个储存卷筒2分别位于多个空间内,密封盒体1上固定连接有多个通管11,多个软体机器人主体3分别固定连接在多个通管11上,每个所述的储存卷筒2上均设置有驱动其进行转动的储存电机21,储存电机21固定连接在密封盒体1上,每个柔性盖4上均设置有操作工具5,如图2和3所示,多个软体机器人主体3分别穿过多个检测机构6;
25.所述密封盒体1是起到存储内翻的软体机器人主体3、输入驱动气压的支撑盒体,盒体有一气压输入口,有多个软体机器人主体3生长的出口,用于安装多个软体机器人主体3;
26.所述软体机器人主体3是由尼龙薄膜制成的外翻筒状主体,软体机器人主体3的一端密封,软体机器人主体3内翻存储在密封盒体1中,密封盒充1气后软体机器人主体3外翻生长;
27.所述柔性盖4呈收口杯状,柔性盖4的开口处设置有弹性绳41,弹性绳41收紧力使
柔性盖4能约束在软体机器人主体3的尖端,柔性盖4是连接软体机器人主体3和操作工具5的连接工具,用于携带操作工具5,操作工具5可以是机械手;
28.所述操作工具5为利用柔性盖4携带在软体机器人主体3尖端的用于完成对应操作的工具,如探测或者维修等;
29.所述检测机构6包括滚轮ⅰ61和滚轮ⅱ62,滚轮ⅰ61和滚轮ⅱ62均转动连接在密封盒体1上,滚轮ⅰ61上连接有编码器63,编码器63固定连接在密封盒体1上,编码器63和上位机连接,上位机和储存电机21连接;
30.当软体机器人主体3生长时软体机器人主体3的内翻部分经过滚轮ⅰ61和滚轮ⅱ62,滚轮ⅰ61转动带动编码器63的内轴进行转动,编码器63将转动信号变为电信号传输给上位机,上位机控制储存电机21输出轴的转动,进而控制软体机器人主体3生长的长度;
31.如图5所示,生长型软体机器人的运动原理是内部气压驱动的筒形薄膜的外翻,软体机器人主体3内翻后存储在密封盒体1的储存卷筒2卷筒上,密封盒体1内充气后气压驱动软体机器人主体3的薄膜尖端外翻而生长;
32.使用时,将多条软体机器人主体3分别安装在密封盒体1的出口上,可以根据任务的情况来决定使用软体机器人主体3的数量,软体机器人主体3的尖端可以通过柔性盖4携带各种操作工具5;
33.当密封盒体1内通入压力气体时,通过储存电机21输出轴来控制储存卷筒2是否转动,进而控制对应的软体机器人主体3是否伸出生长;
34.如图6所示,每个软体机器人主体3上均设置有多个关节,每个关节均由周向均匀分布的三个线驱动单元构成;每个线驱动单元由一个可以进行伸缩的伸缩单元和一个拉线构成,伸缩单元可以是电机驱动的卷筒,拉线的一端固定连接在软体机器人主体3上,另一端固定连接在伸缩单元的伸缩端上,进而通过伸缩单元伸缩端的收缩完成软体机器人主体3的弯折;
35.进一步的,每个关节均由周向均匀分布的三个线驱动单元构成,进而使得软体机器人主体3可以向多个方向弯折;
36.每条软体机器人主体3的柔性特征对应用环境有极高的适应性,软体机器人主体3通过尖端生长的方式可以进入复杂狭小的任务环境,每条软体机器人主体3可以单独控制到达不同位置实现不同的任务,也可以多条软体机器人主体3到达同一位置利用尖端不同的操作工具5协作完成单臂不能完成的更加复杂的任务,同时多条软体机器人主体3可以协同运动以实现包络等动作完成目标的捕获任务,最终实现了一种多臂协同的自生长软体机器人系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1