一种基于AI的RPA机器人触动式管理运维设备及其方法与流程
一种基于ai的rpa机器人触动式管理运维设备及其方法
技术领域
1.本发明涉及一种挡水板组件,具体为一种基于ai的rpa机器人触动式管理运维设备及其方法,属于管理运维技术领域。
背景技术:
2.对与生产管控相关的各项业务的巡检以及异常处理一直是保证企业正常高效运营的一项重要工作,也是企业管理中的一个难题。随着企业信息化的不断深入,越来越多的信息化业务系统被广泛应用,例如但不限于生产任务管理系统、厂级监控信息系统、生产统计系统、点检系统、办公系统等等。
3.现有的工厂在运行的过程中,一般都需要管理人员通过监控摄像头时刻进行监视,但是人工无法进行24小时持续的进行工作,当发生意外的进行的时候,无法及时进行解决,因此我们提出了一种基于ai的rpa机器人触动式管理运维设备及其方法。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供一种基于ai的rpa机器人触动式管理运维设备及其方法,当对应的触动按钮被触动按压时,通过传递模块将被按压的触动按钮信息传递到单片机,使得单片机可以控制与触动按钮对应的开关开启,如发生火灾时,控制总电源开关的关闭,消防开关的开启,温度上升时,控制空调开关的开启,无需时刻人工进行监测,从而达到了有效的管理运维效果。
5.本发明通过以下技术方案来实现上述目的,一种基于ai的rpa机器人触动式管理运维设备,包括:
6.移动底座,所述移动底座的内部装配有驱动机构,所述移动底座的两侧均装配有两个驱动轮,且驱动机构与四个驱动轮传动连接,所述移动底座的正面固定连接有固定块,且所述固定块的上表面固定安装有路径摄像头;
7.控制平台,所述控制平台固定安装在移动底座的上表面,所述控制平台的上表面呈阶梯状设置,所述控制平台的上表面固定安装有多个传感器和支撑杆,且所述支撑杆的顶端固定有监测摄像头,所述控制平台的上表面还固定连接多个触动按钮,所述控制平台的上表面装配有移动组件,所述移动组件传动连接有移动条,所述移动条其中一端装配有触动组件,且所述触动组件装配有触动块。
8.优选的,所述移动条的下表面转动连接有多个滚轴,且多个所述滚轴的下表面均与控制平台相贴合。
9.优选的,所述移动组件包括开设在控制平台上表面的移动槽,所述移动槽的两侧内壁上均开设有定位槽,两个定位槽的内壁上均滑动连接有定位块,两个所述定位块之间固定连接有固定框,且所述固定框的两侧外壁分别与移动槽两侧内壁相贴合。
10.优选的,所述移动槽的内底壁上固定安装有固定齿条,所述固定框的内壁上转动连接有转动轴,所述转动轴的外表面固定套接有传动齿轮,且所述传动齿轮与固定齿条啮
合连接,所述移动条的上表面固定安装有传动电机。
11.优选的,所述传动电机的输出端固定安装有传动轴,所述传动轴的外表面和转动轴的外表面均固定套接有传动链轮,两个所述传动链轮之间传动连接有链条。
12.优选的,所述触动组件包括触动电机,所述触动电机固定安装在移动条的上表面,所述触动电机的输出端固定连接有驱动轴,所述移动条的上表面通过轴承转动连接有活动杆,所述驱动轴的顶端和活动杆的顶端均固定套接有驱动齿轮,且两个所述驱动齿轮啮合连接。
13.优选的,所述活动杆的底端穿过移动条向下延伸,且所述活动杆处于移动条下方的部分外表面开设有外螺纹,并通过外螺纹螺纹连接有内螺纹方筒,所述内螺纹方筒的底端与触动块固定连接。
14.优选的,所述移动条端部的下表面固定连接有限位方筒,且所述限位方筒活动套接在内螺纹方筒的外表面。
15.一种基于ai的rpa机器人触动式管理运维设备的使用方法,包括以下的步骤:
16.s1:在使用的过程中,移动底座正面的路径摄像头对行进路线进行监测,同时移动底座内部的控制器对路径摄像头监测的画面进行识别,然后通过控制器控制移动底座内部的驱动机构带动四个驱动轮进行移动,使得设备可以在预定的路线上进行移动,不会碰撞到路线上的其他物体;
17.s2:当设备进行移动时,控制平台上设置的监测摄像头时刻对工厂各位环节的运行情况进行监测,同时控制平台设置有多个传感器,如温度传感器、湿度传感器、空气传感器等,控制监测工厂中的环境因素;
18.s3:监测摄像头将监测画面和多个传感器将监测工厂中的环境因素传递到控制平台中的设置的控制器中,控制器通过发送模块将工厂中的环境因素与监测画面传递到用户客户端中,用户可以通过客户端对工厂中的环境因素与监测画面进行随时查看;
19.s4:当控制器接收到传感器检测的工厂中的环境因素发生较大变化时,如温度高出预定范围,烟尘浓度高出预定范围时,控制器控制传动电机开始工作,带动了传动轴进行传动,使得传动轴端部的传动链轮进行工作,并通过链条带动了另一个传动链轮和转动轴进行转动,且在转动轴转动时,其外表面的传动齿轮开始转动,因传动齿轮和固定齿条啮合连接,使得传动齿轮转动的同时进行移动,带动了固定框在移动槽中进行滑动,则带动了移动条在控制平台上进行移动;
20.s5:在移动条进行移动时,带动了触动组件和触动块进行移动,直至移动到其中一个触动按钮的上方,如烟尘高出预定范围,带动触动块移动到烟尘按钮上,如温度大大高出预定范围,产生火灾时,带动触动块移动到消防按钮上;
21.s6:当触动块停止移动时,控制器控制触动电机进行工作,带动了触动电机输出端的驱动轴进行转动,在驱动轴转动时,带动了其顶端的驱动齿轮开设转动,进而带动了另一个驱动齿轮和活动杆进行转动,因活动杆处于移动条下方的部分通过外螺纹螺纹连接有内螺纹方筒,且内螺纹方筒与限位方筒的内壁相贴合,从而可以使得内螺纹方筒无法进行转动,而向下移动,进而推动了触动块向下移动,直至使得触动块处于到触动按钮,对触动按钮进行触动按压;
22.s7:当对应的触动按钮被触动按压时,通过传递模块将被按压的触动按钮信息传
递到单片机,使得单片机可以控制与触动按钮对应的开关开启,如发生火灾时,控制总电源开关的关闭,消防开关的开启,温度上升时,控制空调开关的开启。
23.本发明的有益效果是:通过设置的移动组件,当控制器接收到传感器检测的工厂中的环境因素发生较大变化时,如温度高出预定范围,烟尘浓度高出预定范围时,控制器控制传动电机开始工作,带动了传动轴进行传动,使得传动轴端部的传动链轮进行工作,并通过链条带动了另一个传动链轮和转动轴进行转动,且在转动轴转动时,其外表面的传动齿轮开始转动,因传动齿轮和固定齿条啮合连接,使得传动齿轮转动的同时进行移动,带动了固定框在移动槽中进行滑动,则带动了移动条在控制平台上进行移动;
24.并通过设置的触动组件,控制触动电机进行工作,带动了触动电机输出端的驱动轴进行转动,在驱动轴转动时,带动了其顶端的驱动齿轮开设转动,进而带动了另一个驱动齿轮和活动杆进行转动,因活动杆处于移动条下方的部分通过外螺纹螺纹连接有内螺纹方筒,且内螺纹方筒与限位方筒的内壁相贴合,从而可以使得内螺纹方筒无法进行转动,而向下移动,进而推动了触动块向下移动,直至使得触动块处于到触动按钮,对触动按钮进行触动按压;
25.当对应的触动按钮被触动按压时,通过传递模块将被按压的触动按钮信息传递到单片机,使得单片机可以控制与触动按钮对应的开关开启,如发生火灾时,控制总电源开关的关闭,消防开关的开启,温度上升时,控制空调开关的开启,无需时刻人工进行监测,从而达到了有效的管理运维效果。
附图说明
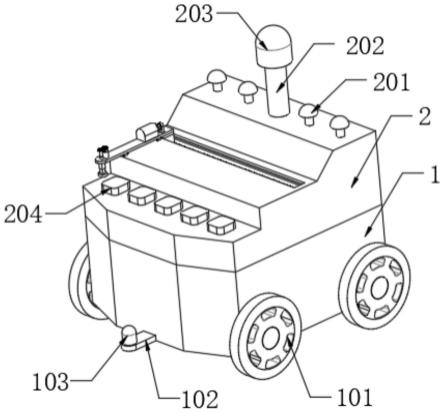
26.图1为本发明的结构示意图;
27.图2为本发明的控制平台的结构示意图;
28.图3为本发明的图2中的a部分放大示意图;
29.图4为本发明的移动条的结构示意图;
30.图5为本发明的移动组件的结构示意图;
31.图6为本发明的触动组件的结构示意图;
32.图7为本发明的触动组件的部分结构示意图;
33.图8为本发明的工作流程示意图一;
34.图9为本发明的工作流程示意图二;
35.图10为本发明的工作流程示意图三。
36.图中:1、移动底座;101、驱动轮;102、固定块;103、路径摄像头;2、控制平台;201、传感器;202、支撑杆;203、监测摄像头;204、触动按钮;205、移动条;206、触动块;207、滚轴;3、移动槽;301、定位槽;302、固定框;303、定位块;304、固定齿条;305、转动轴;306、传动齿轮;307、传动电机;308、传动轴;309、传动链轮;310、链条;4、触动电机;401、驱动轴;402、活动杆;403、驱动齿轮;404、限位方筒;405、内螺纹方筒。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.本发明实施例公开一种基于ai的rpa机器人触动式管理运维设备及其方法。
39.如图1-10所示,包括:
40.移动底座1,移动底座1的内部装配有驱动机构,移动底座1的两侧均装配有两个驱动轮101,且驱动机构与四个驱动轮101传动连接,移动底座1的正面固定连接有固定块102,且固定块102的上表面固定安装有路径摄像头103;
41.控制平台2,控制平台2固定安装在移动底座1的上表面,控制平台2的上表面呈阶梯状设置,控制平台2的上表面固定安装有多个传感器201和支撑杆202,且支撑杆202的顶端固定有监测摄像头203,控制平台2的上表面还固定连接多个触动按钮204,控制平台2的上表面装配有移动组件,移动组件传动连接有移动条205,移动条205其中一端装配有触动组件,且触动组件装配有触动块206。
42.移动条205的下表面转动连接有多个滚轴207,且多个滚轴207的下表面均与控制平台2相贴合。
43.移动组件包括开设在控制平台2上表面的移动槽3,移动槽3的两侧内壁上均开设有定位槽301,两个定位槽301的内壁上均滑动连接有定位块303,两个定位块303之间固定连接有固定框302,且固定框302的两侧外壁分别与移动槽3两侧内壁相贴合。
44.移动槽3的内底壁上固定安装有固定齿条304,固定框302的内壁上转动连接有转动轴305,转动轴305的外表面固定套接有传动齿轮306,且传动齿轮306与固定齿条304啮合连接,移动条205的上表面固定安装有传动电机307。
45.传动电机307的输出端固定安装有传动轴308,传动轴308的外表面和转动轴305的外表面均固定套接有传动链轮309,两个传动链轮309之间传动连接有链条310。
46.触动组件包括触动电机4,触动电机4固定安装在移动条205的上表面,触动电机4的输出端固定连接有驱动轴401,移动条205的上表面通过轴承转动连接有活动杆402,驱动轴401的顶端和活动杆402的顶端均固定套接有驱动齿轮403,且两个驱动齿轮403啮合连接。
47.活动杆402的底端穿过移动条205向下延伸,且活动杆402处于移动条205下方的部分外表面开设有外螺纹,并通过外螺纹螺纹连接有内螺纹方筒405,内螺纹方筒405的底端与触动块206固定连接。
48.移动条205端部的下表面固定连接有限位方筒404,且限位方筒404活动套接在内螺纹方筒405的外表面。
49.包括以下的步骤:
50.s1:在使用的过程中,移动底座1正面的路径摄像头103对行进路线进行监测,同时移动底座1内部的控制器对路径摄像头103监测的画面进行识别,然后通过控制器控制移动底座1内部的驱动机构带动四个驱动轮101进行移动,使得设备可以在预定的路线上进行移动,不会碰撞到路线上的其他物体;
51.s2:当设备进行移动时,控制平台2上设置的监测摄像头203时刻对工厂各位环节的运行情况进行监测,同时控制平台2设置有多个传感器201,如温度传感器、湿度传感器、空气传感器等,控制监测工厂中的环境因素;
52.s3:监测摄像头203将监测画面和多个传感器201将监测工厂中的环境因素传递到控制平台2中的设置的控制器中,控制器通过发送模块将工厂中的环境因素与监测画面传递到用户客户端中,用户可以通过客户端对工厂中的环境因素与监测画面进行随时查看;
53.s4:当控制器接收到传感器201检测的工厂中的环境因素发生较大变化时,如温度高出预定范围,烟尘浓度高出预定范围时,控制器控制传动电机307开始工作,带动了传动轴308进行传动,使得传动轴308端部的传动链轮309进行工作,并通过链条310带动了另一个传动链轮309和转动轴305进行转动,且在转动轴305转动时,其外表面的传动齿轮306开始转动,因传动齿轮306和固定齿条304啮合连接,使得传动齿轮306转动的同时进行移动,带动了固定框302在移动槽3中进行滑动,则带动了移动条205在控制平台2上进行移动;
54.s5:在移动条205进行移动时,带动了触动组件和触动块206进行移动,直至移动到其中一个触动按钮204的上方,如烟尘高出预定范围,带动触动块206移动到烟尘按钮上,如温度大大高出预定范围,产生火灾时,带动触动块206移动到消防按钮上;
55.s6:当触动块206停止移动时,控制器控制触动电机4进行工作,带动了触动电机4输出端的驱动轴401进行转动,在驱动轴401转动时,带动了其顶端的驱动齿轮403开设转动,进而带动了另一个驱动齿轮403和活动杆402进行转动,因活动杆402处于移动条205下方的部分通过外螺纹螺纹连接有内螺纹方筒405,且内螺纹方筒405与限位方筒404的内壁相贴合,从而可以使得内螺纹方筒405无法进行转动,而向下移动,进而推动了触动块206向下移动,直至使得触动块206处于到触动按钮204,对触动按钮204进行触动按压;
56.s7:当对应的触动按钮204被触动按压时,通过传递模块将被按压的触动按钮204信息传递到单片机,使得单片机可以控制与触动按钮204对应的开关开启,如发生火灾时,控制总电源开关的关闭,消防开关的开启,温度上升时,控制空调开关的开启。
57.对于本领域技术人员而言,通过设置的移动组件,当控制器接收到传感器201检测的工厂中的环境因素发生较大变化时,如温度高出预定范围,烟尘浓度高出预定范围时,控制器控制传动电机307开始工作,带动了传动轴308进行传动,使得传动轴308端部的传动链轮309进行工作,并通过链条310带动了另一个传动链轮309和转动轴305进行转动,且在转动轴305转动时,其外表面的传动齿轮306开始转动,因传动齿轮306和固定齿条304啮合连接,使得传动齿轮306转动的同时进行移动,带动了固定框302在移动槽3中进行滑动,则带动了移动条205在控制平台2上进行移动;
58.并通过设置的触动组件,控制触动电机4进行工作,带动了触动电机4输出端的驱动轴401进行转动,在驱动轴401转动时,带动了其顶端的驱动齿轮403开设转动,进而带动了另一个驱动齿轮403和活动杆402进行转动,因活动杆402处于移动条205下方的部分通过外螺纹螺纹连接有内螺纹方筒405,且内螺纹方筒405与限位方筒404的内壁相贴合,从而可以使得内螺纹方筒405无法进行转动,而向下移动,进而推动了触动块206向下移动,直至使得触动块206处于到触动按钮204,对触动按钮204进行触动按压;
59.当对应的触动按钮204被触动按压时,通过传递模块将被按压的触动按钮204信息传递到单片机,使得单片机可以控制与触动按钮204对应的开关开启,如发生火灾时,控制总电源开关的关闭,消防开关的开启,温度上升时,控制空调开关的开启,无需时刻人工进行监测,从而达到了有效的管理运维效果。
60.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包
含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1