一种基于PSO-SVM-RFE的机器人铣边颤振多元特征融合方法
本发明属于机器人铣边,具体为一种基于pso-svm-rfe的机器人铣边颤振多元特征融合方法。
背景技术:
1、当前,碳纤维增强基复合材料(carbon fiber reinforced polymer,cfrp)因其具有可设计性、轻质、高强、抗疲劳、耐腐蚀、易修补等优异性能受到了航空航天、军工、汽车等领域的青睐。然而,由于其成形精度差,成型过程中通常需要在构件边缘留有余量作为牺牲层,固化之后进行铣削去除,称之为铣边,以满足与其他零部件的装配及连接要求。对于cfrp零件铣边而言,现有的传统机床在加工行程上存在局限性,开发专用机床成本高,手工切边效率低、精度差。因此,具有高灵活性、低成本特点的工业机器人被用于大型复合材料铣边已成为一种趋势。但本身结构弱刚性的缺点导致其在铣边过程中极易出现颤振现象。强烈的抖动不仅破坏已加工表面的质量、影响零件的铣边精度,还会加剧刀具磨损及损坏机器人铣边系统。近些年来,使用传感器采集与机器人加工状态相关联的信号,提取反应颤振信息的特征量,并基于人工智能算法实现对机器人加工颤振的实时监测逐步成为国内外学者新的关注点。而过多的颤振特征量在实现颤振监测时会产生信息冗余同时影响识别精度和时长。使用特征选择算法将与颤振敏感的特征筛选出来,将其融合为一个特征,提高颤振识别准确率的同时也有助于阈值的确定。这种融合特征一方面具有多元特征的优点,相比较单一特征,抗干扰性强,准确率高,另一方面又避免了使用多元特征监测颤振时只能反应颤振与否,不能反应颤振的剧烈程度。通过监测融合特征的值与阈值比较,可以反应颤振的剧烈程度,为将来的颤振抑制提供参考。
技术实现思路
1、本发明目的在于提供一种基于pso-svm-rfe的机器人铣边颤振多元特征融合方法,将机器学习算法与缠着监测相结合以优化铣边颤振特征量选择,提高机器人铣削颤振识别准确率。
2、实现上述目的的技术方案为:
3、一种基于pso-svm-rfe的机器人铣边颤振多元特征融合方法,包括以下步骤:
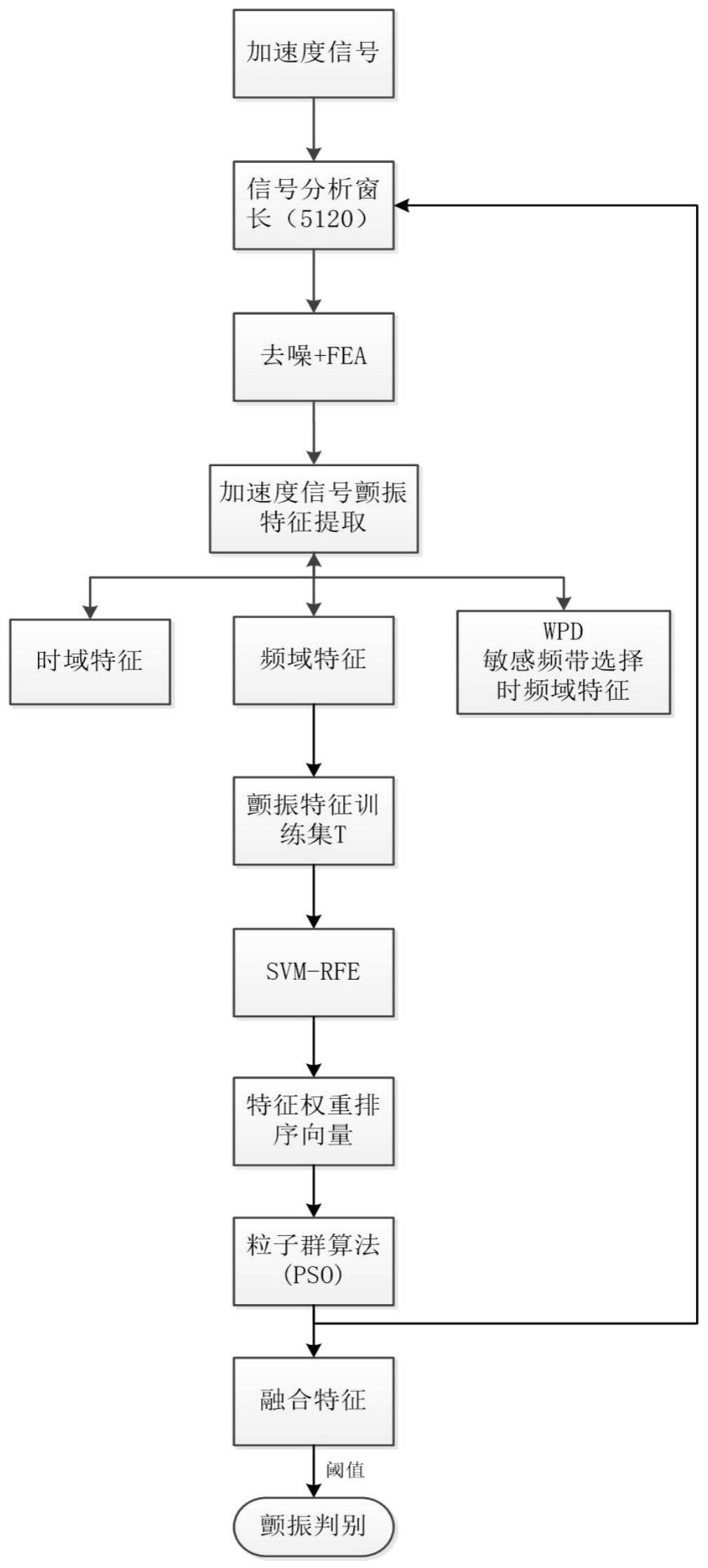
4、步骤1、对加速度传感器采集到的振动信号进行预处理:采用巴特沃斯滤波器去除高频噪声信号;对去噪后的信号进行频谱分析,使用频率去除算法(fea)去除齿通频率及其倍频;
5、步骤2、加速度信号颤振特征提取:对预处理后的加速度信号分别进行时域、频域以及时频域变换提取出对应的时域、频域以及时频域特征量;
6、步骤3、基于svm-rfe进行特征向量权重排序:基于步骤2得到大量的特征量,组合成特征向量集,使用支持向量机递归特征消除法(svm-rfe),将特征量向量集作为输入,得到排序后的特征向量集;
7、步骤4、多元特征融合:基于粒子群优化算法(pso),对步骤3特征向量集中排列前三的敏感特征,以成本函数最大为优化目标进行多元特征融合,融合后的特征代入svm中进行颤振监测精度验证。
8、与现有技术相比,本发明的优点包括如下四点:
9、(1)本发明提出将机器学习算法与颤振监测相结合,优化了铣边颤振特征量选择问题,对于颤振识别具有良好效果;
10、(2)本方法实现了对颤振剧烈程度的识别,成功解决了传统方法只能识别颤振与否的问题;
11、(3)针对颤振初期阶段难以监测的问题提出了去除齿通频率及其倍频的方法,提高了颤振初期监测的准确率;
12、(4)针对单一特征识别颤振时易受干扰的问题提出了多元融合特征的方法,不仅提高了识别准确率同时抗干扰性也得到增强。
13、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照附图,对本发明作进一步详细的说明。
技术特征:
1.一种基于pso-svm-rfe的机器人铣边颤振多元特征融合方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于pso-svm-rfe的机器人铣边颤振多元特征融合方法,其特征在于,所述步骤1具体包括如下步骤:
3.根据权利要求2所述的基于pso-svm-rfe的机器人铣边颤振多元特征融合方法,其特征在于,所述步骤2具体包括如下步骤:
4.根据权利要求3所述的基于pso-svm-rfe的机器人铣边颤振多元特征融合方法,其特征在于,所述步骤3具体包括如下步骤:
5.根据权利要求4所述的基于pso-svm-rfe的机器人铣边颤振多元特征融合方法,其特征在于,所述步骤4具体包括如下步骤:
技术总结
本发明公开了一种基于PSO‑SVM‑RFE的机器人铣边颤振多元特征融合方法。首先,对加速度信号进行预处理,通过消除齿频及其倍频凸显颤振初期频率;其次,将预处理后的加速度信号进行时域、频域以及时频域变换,得到由波形因子、重心频率及能量熵组成的特征向量集;然后,基于支持向量机递归特征消除法(SVM‑RFE),研究不同特征量对铣边颤振的敏感程度,构建多元特征分类模型;接着,运用粒子群算法(PSO)将排序前3的敏感特征融合为新的颤振特征,由颤振阈值将铣边过程分为稳定状态、颤振初期及剧烈颤振三个阶段;最后,编写以上算法程序计算融合特征,并通过机器人铣边实验数据验证识别结果。本发明可有效解决机器人铣边颤振信号特征量选择问题,提高颤振识别精度。
技术研发人员:郑侃,孟丹,廖文和,王涛,张磊
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!