多轴工业机器人的制作方法
本申请涉及机器人,尤其是涉及一种多轴工业机器人。
背景技术:
1、多轴机器人即为至少可以进行多个自由度运动的机械臂或者机械手装置,其通过多个自由度的组合,以在空间内完成既定的动作。多轴机器人包括固定基座以及依次设置在基座上的多个臂部,相邻两个臂部转动连接,且通过驱动装置的驱动,相邻两个臂部之间可以产生相对转动。在最末端的臂部上,可以设置有点胶装置、打磨装置或者夹持装置等,以使得多轴机器人在工业应用中,完成打胶、焊接、打磨、取料、上料等作业工程。在作业的过程中,由于机械臂需要将功能装置移动至特定部位的需要,其存在有延伸至较高位置以及延伸至较低位置的姿态切换,例如在自动装配螺栓件的过程中,机械手需要在物料区延伸至较高位置,以便于自上而下地将螺栓件从料盘内取出,而在装配时,其需要在装配区延伸至较低位置,以便于自下而上地将螺栓件转配在指定部位。然而在现有技术中,多轴工业机器人由于其臂部延伸较长,当臂部向基座的侧面延伸时,其重心偏移基座,致使多轴工业机器人存在有倾覆的可能。
技术实现思路
1、为了改善现有技术中多轴工业机器人的臂部倾斜延伸时具有倾覆的可能的问题,本申请提供一种多轴工业机器人。
2、本申请提供一种多轴工业机器人,所述多轴工业机器人包括:
3、基座;
4、第一臂部,其沿竖直轴线可转动地设置在所述基座上;
5、第二臂部,其一端与所述第一臂部的顶部一端转动连接,且沿水平轴线可转动设置;
6、第三臂部,其一端与所述第二臂部远离所述第一臂部的一端转动连接,且沿水平轴线可转动设置;
7、第四臂部,其一端与所述第三臂部远离所述第二臂部的一端转动连接,且沿水平轴线可转动设置;
8、功能装置,其设置在所述第四臂部远离所述第三臂部的一端;
9、其中,所述多轴工业机器人还包括主配重块,所述第二臂部远离所述第三臂部的一端延伸以形成有延伸臂部,所述主配重块设置在所述延伸臂部远离所述第二臂部与所述第一臂部转动连接处的一端,所述延伸臂部与所述第二臂部呈钝角设置,且钝角的开口方向远离所述基座,所述延伸臂部的长度小于所述第二臂部的长度。
10、可选的,所述延伸臂部的两侧设置有转动轴,所述主配重块通过吊耳可转动地设置在所述转动轴上。
11、可选的,所述多轴工业机器人还包括辅助配重块,所述第二臂部靠近所述第三臂部的一端设置有悬挂架,所述辅助配重块可拆卸设置在所述悬挂架上,且叠放设置有若干块。
12、可选的,所述悬挂架包括悬挂杆和连接板,所述悬挂杆水平设置,所述连接板设置在所述悬挂杆的两端,且连接所述悬挂杆和所述第二臂部,所述辅助配重块包括插入端和悬挂端,所述插入端穿过所述悬挂杆与所述第二臂部之间的间隙,所述悬挂端卡接在所述悬挂杆上。
13、可选的,所述多轴工业机器人还包括顶推装置,所述顶推装置设置在所述延伸臂部的正下方,且用于将所述延伸臂部沿竖直方向向上推动。
14、可选的,所述多轴工业机器人还包括外罩,所述外罩罩设在所述延伸臂部和所述主配重块外,且与所述第一臂部连接,所述外罩可滑动地设置在所述基座上。
15、可选的,所述基座上设置有环形导轨,所述外罩上设置有第一滑块,所述第一滑块与所述环形导轨滑动连接。
16、可选的,所述外罩的内侧壁上设置有弧形导轨,所述延伸臂部上设置有第二滑块,所述第二滑块与所述弧形导轨滑动连接。
17、可选的,所述外罩的内侧壁上还设置有阻尼,所述阻尼至少设置在所述弧形导轨的底端,以用于与所述第二滑块相抵接。
18、可选的,所述第一臂部的顶部一端、所述第二臂部靠近所述第三臂部的一端、所述第三臂部靠近所述第四臂部的一端均设置有开口槽,所述开口槽均沿所述基座的轴截面对称设置,所述第二臂部、所述第三臂部和所述第四臂部均设置在靠近所述基座的前一臂部的所述开口槽内。
19、本申请通过将第一臂部竖直延伸,且在第二臂部上设置与其呈钝角设置的延伸臂部,同时在延伸臂部上设置主配重块,可以通过主配重块在有限的空间内实现对多轴工业机器人的总体重心的左右和上下的平衡,以其总体重心集中在第一臂部的竖直轴线且集中在第一臂部上,进而达到降低多轴工业机器人倾覆的可能的目的。
技术特征:
1.一种多轴工业机器人,其特征在于,所述多轴工业机器人包括:
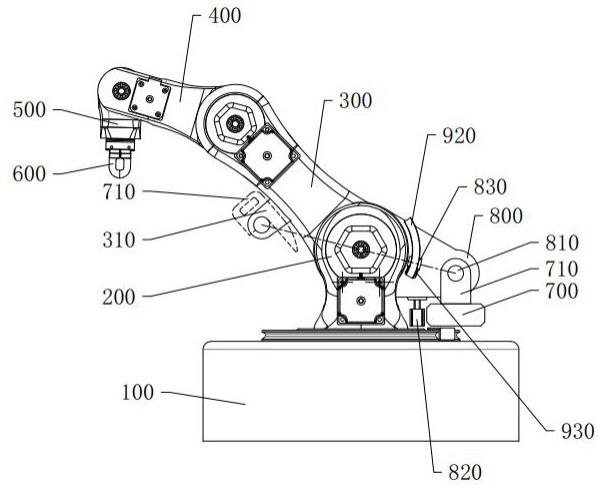
2.根据权利要求1所述的多轴工业机器人,其特征在于,所述延伸臂部(800)的两侧设置有转动轴(810),所述主配重块(700)通过吊耳(710)可转动地设置在所述转动轴(810)上。
3.根据权利要求1所述的多轴工业机器人,其特征在于,所述多轴工业机器人还包括辅助配重块(720),所述第二臂部(300)靠近所述第三臂部(400)的一端设置有悬挂架(310),所述辅助配重块(720)可拆卸设置在所述悬挂架(310)上,且叠放设置有若干块。
4.根据权利要求3所述的多轴工业机器人,其特征在于,所述悬挂架(310)包括悬挂杆(311)和连接板(312),所述悬挂杆(311)水平设置,所述连接板(312)设置在所述悬挂杆(311)的两端,且连接所述悬挂杆(311)和所述第二臂部(300),所述辅助配重块(720)包括插入端和悬挂端,所述插入端穿过所述悬挂杆(311)与所述第二臂部(300)之间的间隙,所述悬挂端卡接在所述悬挂杆(311)上。
5.根据权利要求1所述的多轴工业机器人,其特征在于,所述多轴工业机器人还包括顶推装置(820),所述顶推装置(820)设置在所述延伸臂部(800)的正下方,且用于将所述延伸臂部(800)沿竖直方向向上推动。
6.根据权利要求1所述的多轴工业机器人,其特征在于,所述多轴工业机器人还包括外罩(900),所述外罩(900)罩设在所述延伸臂部(800)和所述主配重块(700)外,且与所述第一臂部(200)连接,所述外罩(900)可滑动地设置在所述基座(100)上。
7.根据权利要求6所述的多轴工业机器人,其特征在于,所述基座(100)上设置有环形导轨(110),所述外罩(900)上设置有第一滑块(910),所述第一滑块(910)与所述环形导轨(110)滑动连接。
8.根据权利要求6所述的多轴工业机器人,其特征在于,所述外罩(900)的内侧壁上设置有弧形导轨(920),所述延伸臂部(800)上设置有第二滑块(830),所述第二滑块(830)与所述弧形导轨(920)滑动连接。
9.根据权利要求8所述的多轴工业机器人,其特征在于,所述外罩(900)的内侧壁上还设置有阻尼(930),所述阻尼(930)至少设置在所述弧形导轨(920)的底端,以用于与所述第二滑块(830)相抵接。
10.根据权利要求1所述的多轴工业机器人,其特征在于,所述第一臂部(200)的顶部一端、所述第二臂部(300)靠近所述第三臂部(400)的一端、所述第三臂部(400)靠近所述第四臂部(500)的一端均设置有开口槽,所述开口槽均沿所述基座(100)的轴截面对称设置,所述第二臂部(300)、所述第三臂部(400)和所述第四臂部(500)均设置在靠近所述基座(100)的前一臂部的所述开口槽内。
技术总结
本申请涉及机器人技术领域,尤其是涉及一种多轴工业机器人,包括:基座;第一臂部,其沿竖直轴线可转动地设置;第二臂部,其一端与第一臂部的顶部一端转动连接;第三臂部,其一端与第二臂部转动连接;第四臂部,其一端与第三臂部转动连接;功能装置,其设置在第四臂部远离第三臂部的一端;多轴工业机器人还包括主配重块,第二臂部延伸以形成有延伸臂部,主配重块设置在延伸臂部远离第二臂部的一端,延伸臂部与第二臂部呈钝角设置。本申请可以通过主配重块在有限的空间内实现对多轴工业机器人的总体重心的左右和上下的平衡,以其总体重心集中在第一臂部的竖直轴线且集中在第一臂部上,进而达到降低多轴工业机器人倾覆的可能的目的。
技术研发人员:肖金金
受保护的技术使用者:深圳市协和传动器材有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!