一种侦察防御机器人及其作业方法与流程
1.本发明涉及机器人领域,具体地说是涉及一种侦察防御机器人,以及该机器人的运动作业方法。
背景技术:
2.目前,国内外机器人多用于公共场所的侦察,主要是以检测气体、烟雾及视频回传现场状况等为主,有些会进一步采用报警器等进行声光报警提醒。然而,现有国内外机器人较少具备主动防御的功能,如实时跟踪及在必要情况下驱赶入侵者等,因此在家庭或商场等场所巡检使用起来具有一定的局限性。
3.申请公布号为cn106598052a的中国发明专利公开了一种基于环境地图的机器人安防巡检方法及其机器人,其包括按照规划的监控路线进行移动巡查等步骤,并可主动发现不安全因素且进行安全策略确认,但其并没有进一步公开相关的主动防御结构,以对不安全因素进行及时驱离等。
4.申请公布号为cn106697088a的中国发明专利公开了一种战术防卫安保机器人,其采用仿坦克式设计,通过在机身上架设炮台式旋转机构,炮台的炮筒前端设计成狼牙结构,在高速旋转下,可有效地起到防御和攻击的作用,并且将防暴结构集合于一体,具有完美的防暴执行能力。该机器人主要是用于战术防卫防暴方面,在家庭或商场等场所的巡检防护方面并不适用。
技术实现要素:
5.基于上述技术问题,本发明提出一种侦察防御机器人,以及该侦察防御机器人的作业方法。
6.本发明所采用的技术解决方案是:
7.一种侦察防御机器人,包括移动底盘组件和侦察防御组件,所述侦察防御组件设置在移动底盘组件的上方;
8.所述移动底盘组件包括底盘本体,在底盘本体的四角处设置有行走轮,行走轮与用于带动其行进和转向的动力结构相连接;
9.所述侦察防御组件包括侦察组件和防御组件,侦察组件包括激光雷达、照明灯和摄像云台,所述激光雷达安装在底盘本体的头部上方中间位置处,所述照明灯共设置两个,分别位于激光雷达的两侧;所述摄像云台安装在底盘本体的后部上方,摄像云台包括支撑架和摄像装置,摄像装置固定在支撑架的顶部;
10.所述防御组件包括报警灯、扩音器和防御液体喷射装置,防御液体喷射装置安装在底盘本体的前部上方;防御液体喷射装置包括防御液体存放箱、防御液体输送管和防御液体喷射管,防御液体存放箱通过防御液体输送管与防御液体喷射管相连通,在防御液体输送管上设置有输送泵;防御液体喷射管还与能够用于调整其朝向的回转云台相连接,回转云台设置在防御液体存放箱的上方;
11.所述回转云台包括固定块和用于带动固定块在竖直面内转动的俯仰电机,所述防御液体喷射管与固定块相连接;所述固定块和俯仰电机均设置在转动盘上,转动盘还与用于带动其在水平面内转动的回转电机传动连接,在转动盘的下方设置有固定盘,固定盘安装在防御液体存放箱上;
12.在底盘本体上还设置有主控装置,所述动力结构、激光雷达、照明灯、摄像装置、报警灯、扩音器、输送泵、俯仰电机和回转电机均与主控装置相连接。
13.优选的,所述动力结构包括驱动器和电动机,驱动器与电动机相连接,驱动器还连接主控装置;所述驱动器和电动机均设置四个。
14.优选的,所述激光雷达包括激光导航传感器和工控机,激光导航传感器通过工业路由器与工控机相连接,工控机与主控装置相连接。
15.优选的,在底盘本体的上方设置有安装板,所述侦察组件和防御组件均固定在安装板上。
16.优选的,所述报警灯设置在安装板的尾部一角处,所述扩音器设置在安装板的中部一侧。
17.优选的,所述支撑架包括第一层支撑架和第二层支撑架,第二层支撑架设置在第一层支撑架的中部上方,在第二层支撑架的顶部设置有支撑板,所述摄像装置安装在支撑板上;摄像装置的高度高于激光雷达和回转云台的高度;所述工控机设置在第一层支撑架的下方。
18.优选的,所述固定块上设置有通孔,所述防御液体喷射管从通孔中穿过固定块,在固定块的底部设置有旋转板体,旋转板体与俯仰电机的俯仰轴相连接,在旋转板体的两端设置有竖直固定板,竖直固定板的底部与转动盘的两端相连接;
19.在两个竖直固定板之间设置有水平固定板,所述回转电机的机体固定在水平固定板和转动盘之间,回转电机的回转轴穿过转动盘,并与固定盘相连接。
20.优选的,在底盘本体上还设置有供电电池,供电电池分别与主控装置、工控机和激光导航传感器相连接,供电电池还连接有电源转换模块,电源转换模块分别与工业路由器和摄像装置相连接;在底盘本体的尾部设置有与供电电池相连的充电口。
21.一种侦察防御机器人的作业方法,包括以下步骤:
22.(1)侦察防御机器人进入工作场地后,先通过激光雷达进行工作场地的建图,并在构建的地图上设定巡逻路线;
23.(2)侦察防御机器人根据设定的巡逻路线,进行自主导航巡逻;
24.(3)当侦察防御机器人通过激光雷达发现有外来侵入者时,激光雷达给主控装置发送信号,此时主控装置控制摄像装置采集外来侵入者图像信息,并将所采集的图像信息传送至主控装置,与预先存储的图像模型进行比对,确定外来侵入者是否为身份不明外来侵入者;
25.(4)若主控装置判断外来侵入者并不是身份不明外来侵入者时,则侦察防御机器人继续巡逻;
26.(5)若主控装置判断外来侵入者是身份不明外来侵入者时,则主控装置给动力结构传送信号,使得侦察防御机器人不再按设定的巡逻路线巡逻,同时主控装置给报警灯传送信号,使报警灯开启进行声光预警,并且主控装置给扩音器传送信号,使扩音器开启进行
语音驱离;
27.(6)若侦察防御机器人通过激光雷达检测到身份不明外来侵入者离开,则通过主控装置给动力结构传送信号,使得侦察防御机器人继续按设定的巡逻路线巡逻;
28.(7)若侦察防御机器人通过激光雷达检测到身份不明外来侵入者没有离开,则主控装置启动主动防御动作:主控装置根据所获取的身份不明外来侵入者位置,给俯仰电机和回转电机传送信号,使得防御液体喷射管调整至合适的喷射角度,并且主控装置控制输送泵开启,通过喷淋液体的方式驱离身份不明外来侵入者。
29.优选的,所述防御液体存放箱中设置有水袋,水袋与防御液体输送管相连通,在水袋中存放有色液体。
30.本发明的有益技术效果是:
31.本发明侦察防御机器人集侦察与防御功能于一体,可以实现自主巡航,并可对危险入侵者进行识别、声光报警、语音喊话警告以及喷淋液体驱赶等,智能化程度高,非常适合在家庭或商超等公共场所使用;而且侦察防御机器人中的侦察、防御等各部件在底盘本体上整体布局合理,结构紧凑,实用性强,适合大面积推广使用。
附图说明
32.下面结合附图与具体实施方式对本发明作进一步说明:
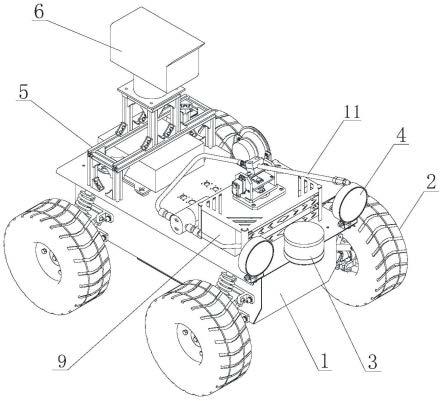
33.图1为本发明侦察防御机器人的整体结构示意图;
34.图2为图1的另一角度视图;
35.图3为图1的正视图;
36.图4为图1的后视图;
37.图5为图1的俯视图;
38.图6为本发明侦察防御机器人中防御液体喷射装置的结构示意图;
39.图7为图6的侧向视图;
40.图8为图6的俯视图;
41.图9为本发明侦察防御机器人中各部件的原理框图。
具体实施方式
42.结合附图,一种侦察防御机器人,包括移动底盘组件和侦察防御组件,所述侦察防御组件设置在移动底盘组件的上方。所述移动底盘组件包括底盘本体1,在底盘本体1的四角处设置有行走轮2,行走轮2与用于带动其行进和转向的动力结构相连接。所述侦察防御组件包括侦察组件和防御组件,侦察组件包括激光雷达3、照明灯4和摄像云台,所述照明灯4共设置两个,分别位于底盘本体的头部上方两侧。所述摄像云台安装在底盘本体1的后部上方,摄像云台包括支撑架5和摄像装置6,摄像装置6固定在支撑架5的顶部。所述防御组件包括报警灯7、扩音器8和防御液体喷射装置,防御液体喷射装置安装在底盘本体1的前部上方。防御液体喷射装置包括防御液体存放箱9、防御液体输送管10和防御液体喷射管11,防御液体存放箱9通过防御液体输送管10与防御液体喷射管11相连通,在防御液体输送管10上设置有输送泵12。防御液体喷射管还与能够用于调整其朝向的回转云台相连接,回转云台设置在防御液体存放箱的上方。所述回转云台包括固定块13和用于带动固定块在竖直面
内转动的俯仰电机14,所述防御液体喷射管11与固定块13相连接。所述固定块13和俯仰电机14均设置在转动盘15上,转动盘15还与用于带动其在水平面内转动的回转电机16传动连接。在转动盘的下方设置有固定盘17,固定盘17安装在防御液体存放箱9上。在底盘本体上还设置有主控装置18,所述动力结构、激光雷达3、照明灯4、摄像装置6、报警灯7、扩音器8、输送泵12、俯仰电机14和回转电机16均与主控装置18相连接。
43.作为对本发明的进一步设计,上述动力结构包括驱动器19和电动机20,驱动器19与电动机20相连接,驱动器19还连接主控装置18。所述驱动器19和电动机20均设置四个,每个行走轮2均由一个驱动器和电动机进行控制。
44.更进一步的,所述激光雷达3包括激光导航传感器301和工控机302,激光导航传感器301通过工业路由器303与工控机302相连接,工控机302与主控装置18相连接。所述激光导航传感器301安装在底盘本体1的头部上方中间位置处,工控机302安装在支撑架5的下方。
45.进一步的,在底盘本体1的上方设置有安装板21,所述侦察组件和防御组件均固定在安装板21上。如所述报警灯7设置在安装板21的尾部一角处,所述扩音器8设置在安装板21的中部一侧。
46.更进一步的,所述支撑架5包括第一层支撑架501和第二层支撑架502,第二层支撑架502设置在第一层支撑架501的中部上方,在第二层支撑架502的顶部设置有支撑板503,所述摄像装置6安装在支撑板503上。第一层支撑架501和第二层支撑架502均是采用竖直支腿和横向连接架等连接形成。摄像装置6的高度高于激光雷达3和回转云台的高度,以方便获取入侵者图像等。所述工控机302设置在第一层支撑架501的下方。
47.进一步的,所述固定块13上设置有通孔,所述防御液体喷射管11从通孔中穿过固定块13,在固定块13的底部设置有旋转板体22,旋转板体22与俯仰电机14的俯仰轴23相连接。在旋转板体22的两端设置有竖直固定板24,竖直固定板24的底部与转动盘15的两端相连接。在两个竖直固定板之间设置有水平固定板25,所述回转电机16呈倒立布置,回转电机16的机体固定在水平固定板25和转动盘15之间,回转电机的回转轴穿过转动盘,并与固定盘17相连接。回转电机16在运行过程中,回转轴与固定盘17固定连接,不会进行转动,相反是通过回转电机的机体转动来带动回转云台进行水平面内的回转运动,该设置方式即确保了回转云台运行的平稳性,又具有整体结构紧凑,空间布局合理等优点。
48.更进一步的,在底盘本体1上还设置有供电电池26,供电电池26分别与主控装置18、工控机302和激光导航传感器301等相连接,以提供电能。供电电池26还连接有电源转换模块27,电源转换模块27分别与工业路由器303和摄像装置6相连接,通过电源转换模块27可转换至合适的供电电压。在底盘本体1的尾部设置有与供电电池相连的充电口28。
49.本发明侦察防御机器人集侦察与防御功能于一体,可以实现自主巡航,并可对危险入侵者进行识别、声光报警、语音喊话警告以及喷淋液体驱赶等,智能化程度高,非常适合在家庭或商超等公共场所使用。而且侦察防御机器人中的侦察、防御等各部件在底盘本体上整体布局合理,结构紧凑,实用性强,适合大面积推广使用。
50.本发明还提供一种侦察防御机器人的作业方法,包括以下步骤:
51.(1)侦察防御机器人进入工作场地后,先通过激光雷达进行工作场地的建图,并在构建的地图上设定巡逻路。
52.(2)侦察防御机器人根据设定的巡逻路线,进行自主导航巡逻。
53.(3)当侦察防御机器人通过激光雷达3扫描发现有外来侵入者时,激光雷达3给主控装置18发送信号,此时主控装置18控制摄像装置6采集外来侵入者图像信息,并将所采集的图像信息传送至主控装置,与预先存储或采集的图像模型进行比对,以确定外来侵入者是否为身份不明外来侵入者。
54.(4)若主控装置18判断外来侵入者并不是身份不明外来侵入者时,则侦察防御机器人继续按原设定路线巡逻。
55.(5)若主控装置18判断外来侵入者是身份不明外来侵入者时,则主控装置18给动力结构传送信号,使得侦察防御机器人不再按设定的巡逻路线巡逻,同时主控装置18给报警灯7传送信号,使报警灯7开启进行声光预警,并且主控装置给扩音器8传送信号,使扩音器8开启进行语音驱离。
56.(6)若侦察防御机器人通过激光雷达3检测到身份不明外来侵入者离开,则通过主控装置18给动力结构传送信号,使得侦察防御机器人继续按设定的巡逻路线巡逻。
57.(7)若侦察防御机器人通过激光雷达检测到身份不明外来侵入者没有离开,则主控装置18启动主动防御动作:主控装置根据所获取的身份不明外来侵入者位置,给俯仰电机14和回转电机16传送信号,使得防御液体喷射管11调整至合适的喷射角度;并且主控装置18控制输送泵12开启,通过喷淋液体的方式驱离身份不明外来侵入者。
58.上述防御液体存放箱9中可直接存放有色液体,也可进一步设置有水袋,水袋与防御液体输送管相连通,在水袋中存放有色液体,以提升密封效果。
59.上述方式中未述及的部分采取或借鉴已有技术即可实现。
60.当然,以上说明仅仅为本发明的较佳实施例,本发明并不限于列举上述实施例,应当说明的是,任何熟悉本领域的技术人员在本说明书的教导下,所做出的所有等同替代、明显变形形式,均落在本发明的实质范围之内,理应受到本发明的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1