机械臂的控制方法、装置、设备、存储介质及程序产品
本申请实施例涉及人工智能技术的机器人控制,特别涉及一种机械臂的控制方法、装置、设备、存储介质及程序产品。
背景技术:
1、近年来,随着机器臂控制技术的发展,机械臂拥有了更广泛的应用场合,诸如家庭、服务、工业、实验室等应用场合。
2、其中,冗余机械臂具有比一般机械臂更多的自由度,能够进行更加复杂的任务。通过给冗余机械臂更换不同的末端执行器可以完成不同的任务,诸如安装、搬运、打磨、喷涂、绘制、检测等。但是冗余机械臂具有更为复杂的控制方式,对此,相关技术通过针对冗余机械臂的末端执行器的位置进行跟随控制,使得末端执行器能够跟随期望位置移动。
3、然而对于复杂、难度高的任务,相关技术中末端执行器的跟随精度不够高。
技术实现思路
1、本申请实施例提供了一种机械臂的控制方法、装置、设备、存储介质及程序产品,能够控制机械臂的末端执行器进行位置和姿态(即位姿)的同步变化,从而提高了机械臂的末端执行器的跟随精确性,以及使得机械臂能够应对复杂且难度高的任务。所述技术方案如下:
2、根据本申请实施例的一个方面,提供了一种机械臂的控制方法,所述方法包括:
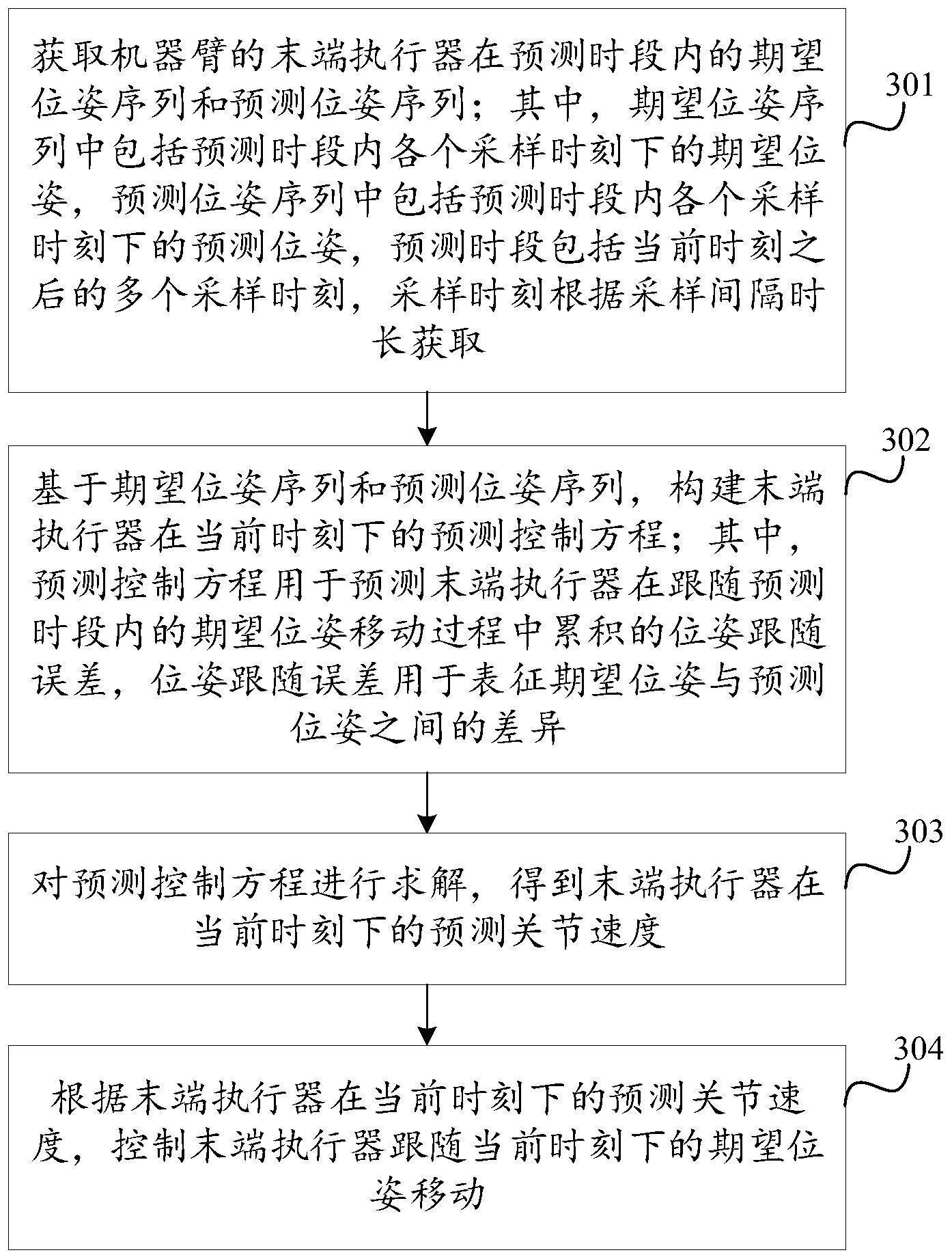
3、获取所述机器臂的末端执行器在预测时段内的期望位姿序列和预测位姿序列;其中,所述期望位姿序列中包括所述预测时段内各个采样时刻下的期望位姿,所述预测位姿序列中包括所述预测时段内各个采样时刻下的预测位姿,所述预测时段包括当前时刻之后的多个采样时刻,所述采样时刻根据采样间隔时长获取;
4、基于所述期望位姿序列和所述预测位姿序列,构建所述末端执行器在当前时刻下的预测控制方程;其中,所述预测控制方程用于预测所述末端执行器在跟随所述预测时段内的期望位姿移动过程中累积的位姿跟随误差,所述位姿跟随误差用于表征所述期望位姿与所述预测位姿之间的差异;
5、对所述预测控制方程进行求解,得到所述末端执行器在所述当前时刻下的预测关节速度;
6、根据所述末端执行器在当前时刻下的预测关节速度,控制所述末端执行器跟随当前时刻下的期望位姿移动。
7、根据本申请实施例的一个方面,提供了一种机械臂的控制装置,所述装置包括:
8、位姿数据获取模块,用于获取所述机器臂的末端执行器在预测时段内的期望位姿序列和预测位姿序列;其中,所述期望位姿序列中包括所述预测时段内各个采样时刻下的期望位姿,所述预测位姿序列中包括所述预测时段内各个采样时刻下的预测位姿,所述预测时段包括当前时刻之后的多个采样时刻,所述采样时刻根据采样间隔时长获取;
9、预测方程构建模块,用于基于所述期望位姿序列和所述预测位姿序列,构建所述末端执行器在当前时刻下的预测控制方程;其中,所述预测控制方程用于预测所述末端执行器在跟随所述预测时段内的期望位姿移动过程中累积的位姿跟随误差,所述位姿跟随误差用于表征所述期望位姿与所述预测位姿之间的差异;
10、预测方程求解模块,用于对所述预测控制方程进行求解,得到所述末端执行器在所述当前时刻下的预测关节速度;
11、机械臂控制模块,用于根据所述末端执行器在当前时刻下的预测关节速度,控制所述末端执行器跟随当前时刻下的期望位姿移动。
12、根据本申请实施例的一个方面,提供了一种设备,所述设备包括处理器和存储器,所述存储器中存储有计算机程序,所述计算机程序由所述处理器加载并执行以实现上述机械臂的控制方法。
13、根据本申请实施例的一个方面,提供了一种计算机可读存储介质,所述可读存储介质中存储有计算机程序,所述计算机程序由处理器加载并执行以实现上述机械臂的控制方法。
14、根据本申请实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该设备执行上述机械臂的控制方法。
15、本申请实施例提供的技术方案至少包括如下有益效果:
16、通过基于末端执行器在预测时段内的期望位姿和预测位姿,构建末端执行器在当前时刻下的预测控制方程,并求解得到当前时刻下的预测关节速度,该当前时刻下的预测关节速度能够使得末端执行器跟随当前时刻下的期望位姿移动,相比于仅通过末端执行器的位置进行末端执行器的跟随任务,本申请提供的技术方案能够提高末端执行器的跟随精确性。同时,由于能够控制机械臂的末端执行器进行位置和姿态(即位姿)的同步变化,使得机械臂能够应对复杂且难度高的任务,而不局限于简单的任务,从而提高了机械臂的适用范围,以及机械臂执行任务的能力。
17、另外,由于每个当前时刻均需重新确定一个预测关节速度,即使在因外界环境(如外界作用力)的影响而导致末端执行器偏移了期望位姿的情况下,本申请实施例也能够使得末端执行器快速恢复到期望位姿下,从而提高了末端执行器的跟随鲁棒性。同时,避免了累积误差对跟随控制的影响,进一步提高了末端执行器的跟随精确性。
技术特征:
1.一种机械臂的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述期望位姿序列和所述预测位姿序列,构建所述末端执行器在当前时刻下的预测控制方程,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述期望位姿序列、所述预测位姿序列、所述预测关节速度序列和所述预测关节速度增量序列,构建所述末端执行器在当前时刻下的预测控制方程,包括:
4.根据权利要求1所述的方法,其特征在于,所述对所述预测控制方程进行求解,得到所述末端执行器在当前时刻下的预测关节速度,包括:
5.根据权利要求4所述的方法,其特征在于,
6.根据权利要求4所述的方法,其特征在于,所述在所述关节约束条件下,对所述预测控制方程进行求解,得到所述末端执行器在当前时刻下的预测关节速度,包括:
7.根据权利要求6所述的方法,其特征在于,所述对所述关节约束条件和所述预测控制方程进行转换,得到所述预测控制方程对应的标准二次规划方程,以及所述关节约束条件对应的标准二次规划约束条件,包括:
8.一种机械臂的控制装置,其特征在于,所述装置包括:
9.一种设备,其特征在于,所述设备包括处理器和存储器,所述存储器中存储有计算机程序,所述计算机程序由所述处理器加载并执行以实现如权利要求1至7任一项所述的机械臂的控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,所述计算机程序由处理器加载并执行以实现如权利要求1至7任一项所述的机械臂的控制方法。
11.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机指令,所述计算机指令存储在计算机可读存储介质中,处理器从所述计算机可读存储介质读取并执行所述计算机指令,以实现如权利要求1至7任一项所述的机械臂的控制方法。
技术总结
本申请公开了一种机械臂的控制方法、装置、设备、存储介质及程序产品,涉及人工智能技术的机器人控制技术领域。所述方法包括:获取机器臂的末端执行器在预测时段内的期望位姿序列和预测位姿序列,该预测时段包括当前时刻之后的多个采样时刻;基于期望位姿序列和预测位姿序列,构建末端执行器在当前时刻下的预测控制方程;对预测控制方程进行求解,得到末端执行器在当前时刻下的预测关节速度;根据末端执行器在当前时刻下的预测关节速度,控制末端执行器跟随当前时刻下的期望位姿移动。本申请实施例通过基于预测时段内的期望位姿和预测位姿,获取使得末端执行器能够跟随期望位姿移动的预测关节速度,提高了末端执行器的跟随精确性。
技术研发人员:金龙,刘付颖,张凡,郑宇
受保护的技术使用者:兰州大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!