一种室内施工机器人及其控制方法
1.本发明属于机器人设备领域,更具体地,涉及一种室内施工机器人及其控制方法。
背景技术:
2.目前,室内装修行业还属于劳动密集型产业,室内装修一般包括刮腻子、打磨、滚涂、贴瓷砖等工序,装修工序复杂,劳动强度大,专业性要求高,行业的自动化水平不高,效率低下,尤其是打磨作业、装修过程中产生的粉尘和噪音会损害工人的身体健康。
3.而且,随着劳动工人文化水平的不断提高,装修行业出现了招工困难,人力成本高的现象,所以智能装修机器人的研发是室内装修行业的必然趋势。在滚涂、喷涂以及打磨作业中,出现了个别能代替人工完成部分作业内容的机器人。然而,目前主流的装修机器人存在以下缺点:(1)作业平整度不高。室内装修对作业墙面的平整度具有很高的要求,现有的装修机器人在平整度方面仍有很大的改善空间。(2)安全问题。现存的装修机器人多采用2d激光雷达避障,机器人的移动平面是雷达的扫描盲区,具有较大的安全隐患。(3)体积庞大,升降空间有限。现存的装修机器人长度较长,重量大,升降高度有限,在厨房、卫生间等狭窄的室内易产生装修盲区。
技术实现要素:
4.针对相关技术的缺陷,本发明的目的在于提供一种室内施工机器人及其控制方法,旨在解决现有装修机器人作业平整度不高、避障盲区较大的问题。
5.本发明的一个方面提供了一种室内施工机器人,包括:移动基部、执行单元、传感单元和控制单元;其中,所述执行单元包括机械臂和连接于机械臂一端的作业执行部;
6.所述执行单元、传感单元和控制单元均运载于所述移动基部之上;
7.所述传感单元包括设于所述移动基部上的激光雷达,以及设于所述作业执行部上的位移传感器;
8.所述移动基部、执行单元和传感单元均与所述控制单元连接。
9.进一步地,所述移动基部前后各设有一个深度相机。
10.进一步地,还包括升降单元;
11.所述升降单元位于所述移动基部上,所述机械臂的一端与所述升降单元的顶部连接。
12.进一步地,所述升降单元包括立柱式升降主体和立柱式升降电机。
13.进一步地,所述作业执行部为喷涂夹具;
14.所述喷涂夹具包括喷涂夹具主体、喷头和位移传感器。
15.进一步地,所述作业执行部为打磨夹具;
16.所述打磨夹具包括位移传感器、打磨夹具主体、打磨器和恒力补偿元件。
17.进一步地,所述作业执行部为阴阳角条夹具。
18.进一步地,所述控制单元的顶部装有带云台的深度相机。
喷涂夹具主体、102-喷头、103-位移传感器、104-打磨夹具主体、105-打磨器、106-恒力补偿元件(acf)、201-空气压缩机、202-数据采集卡、203-电磁阀、204-接线板、205-plc、206-深度相机、207-立柱式升降电机驱动器、208-机械臂控制柜、209-工控机、210-恒力补偿元件控制柜、401-立柱式升降主体、402-立柱式升降电机、501-底盘主体、502-底盘前置相机、503-底盘后置相机。
具体实施方式
43.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
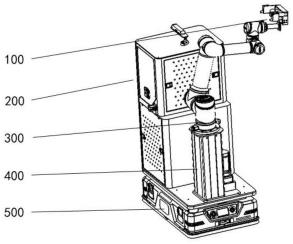
44.如图1所示,本发明实施例提出了一种室内施工机器人,包括执行单元、控制单元200、升降单元400、移动基部500和传感单元(图1中未标示出);其中,所述执行单元包括机械臂300和作业执行部100,机械臂300的一端与升降单元400连接,另一端与作业执行部100相连。
45.作业执行部100、控制单元200、机械臂300、传感单元和升降单元400均运载于移动基部500之上。升降单元400立于移动基部上,移动基部500主要作为搭载平台,在一个实施例中,移动基部为移动底盘。
46.如图2,移动基部500包括一个移动底盘主体501,其上搭载有两个激光雷达(未在图中示出),可实现360
°
的建图、导航和避障。开始正式工作之前,先对工作的环境进行建图,建图完成后设置工作目标点,移动基部500将根据设置的工作目标点自主的规划工作路径,协同其他模块完成墙面作业要求。
47.优选地,在移动底盘主体501的前后各装有一个深度相机,即底盘前置相机502和底盘后置相机503,如图2-3所示。由于激光雷达只能扫描固定高度的平面,存在很大的扫描盲区,因此,本发明在移动基部前后各装一个深度相机,利用深度相机广阔的视角范围能看到地面上的低矮障碍物。机器人在自主导航过程中,将深度相机检测到的障碍物特征点投影到二维激光雷达的扫描平面上,与激光雷达探测到的障碍物一同表示在障碍地图层,作为机器人的导航时的避障依据。利用深度相机的丰富感知信息弥补激光雷达的避障盲区,极大减少了机器人移动过程中由于低矮障碍物带来的安全隐患,并能实现高精度的自主定位导航。
48.可选地,机械臂300采用六自由度机械臂,如图4所示,共设有第一关节、第二关节、第三关节、第四关节、第五关节和第六关节,这六个旋转关节顺次连接,第一关节安装于升降单元400的顶部,第六关节与作业执行部100连接。
49.作业执行部100包括夹具,而夹具种类则根据不同的装修工序进行选择。本发明可实现的装修包括但不限于喷涂、滚涂、打磨和贴阴阳角条等,对应的夹具可以是喷涂夹具、打磨夹具、阴阳角条夹具等等。
50.当室内施工机器人进行喷腻子的工作时需要用到喷涂夹具,如图5所示,喷涂夹具包括喷涂夹具主体101、喷头102和位移传感器103。
51.位移传感器103用于实现装修作业时夹具的水平二次调整。由于移动底盘主体501
在运动时存在误差,底盘无法与墙面平行,二者之间存在一个夹角,无法使机械臂上的夹具与墙面平行,使得对墙面进行作业时无法满足工作要求。夹具上设置两个位移传感器103,用于调整夹具与墙面之间的夹角ω。下面结合图6具体介绍补偿过程。
52.图中线段ac表示墙面,位移传感器置于夹具的两端,分别用b点和d点表示,两个传感器之间的距离为恒定值l,夹具与墙面之间的夹角用ω表示。两个位移传感器分别测得与墙面之间的距离ab和cd,与l、ω之间满足以下几何关系:
[0053][0054]
因此,根据位移传感器103的测量值可计算出夹具与墙面的夹角。同时,已知欧拉角(ψθφ)与四元数表示的旋转矩阵rq之间存在转化关系:
[0055]
将ψ=0,θ=ω,带入上式,从而,根据夹角ω可得夹具相对于机械臂第六关节的补偿四元数q1:
[0056][0057]
获取机械臂300当前的四元数q2,通过q1、q2的数据,得出需要偏转的目标四元数q3=q1q2。将q3的数据传回机械臂,机械臂便会偏转至相应的角度,从而对角度误差进行补偿。
[0058]
喷涂夹具、机械臂300、空气压缩机201、电磁阀203和plc205(后三者位于控制单元200中,图9b)共同组成喷涂系统。喷涂系统的工作原理为:在机械臂调整姿态使得喷涂夹具与墙面平行后,机械臂按照规划的路径开始工作,同时空气压缩机和plc分别给电磁阀通气和给电,使得电磁阀通道连通并输出高压气体给喷头,喷头在高压气体的的作用下打开开关,喷出腻子对墙面进行喷涂作业。
[0059]
当室内施工机器人进行打磨工作时需要用到打磨夹具,如图7所示,打磨夹具包括位移传感器103、打磨夹具主体104、打磨器105和恒力补偿元件(acf)106。可以理解的是,位移传感器103的作用与其在喷涂夹具中的作用相同,都是为了调整夹具与墙面平行,从而保证作业的平整度。
[0060]
由打磨夹具、机械臂200、空气压缩机与恒力补偿元件控制柜210(位于控制单元200中,图9d)组成打磨系统。打磨系统的工作原理为:在机械臂调整姿态使得打磨夹具与墙面平行后,机械臂按照规划的路径开始工作,空气压缩机给恒力补偿元件通入一定压力的气体,在恒力补偿元件控制柜的控制下使得恒力补偿元件输出一个恒定的力,使得打磨器与墙面之间的作用力始终保持恒定。从而完成打磨工作。
[0061]
在室内施工机器人进行贴阴阳角条时需要用到阴阳角条夹具,此时,控制单元顶部装有带云台的深度相机206(图9b),辅助完成贴装阴阳角条的功能。工作时,机械臂末端
的阴阳角条夹具夹持住待贴装的阴阳角条,夹持后机械臂会使阴阳角条保持竖直的状态。阴阳角条夹具、机械臂以及深度相机的相对位置已知,深度相机可检测识别阴阳角条的角线。通过深度相机反馈的角线位置,工控机解算出夹持的阴阳角条与目标阴阳角的相对位置和姿态,实时控制机械臂向目标阴阳角移动并保持夹持的阴阳角条与目标阴阳角的角线保持平行,直到两直线重合,完成阴阳角条的贴装。
[0062]
升降单元400位于移动基部500上,如图1、图8a和图8b所示。本发明的一个实施例中,升降单元400包括立柱式升降主体401和立柱式升降电机402,由立柱式升降电机驱动器和工控机(位于控制单元200内)驱动控制。在室内施工机器人完成墙面较低处的作业后,工控机给立柱式升降电机驱动器发送上升指令,立柱式升降电机驱动器驱动立柱式升降电机工作,立柱式升降电机带动立柱式升降主体上升,从而提升机械臂的高度,从而完成墙面较高处的作业。现有技术中为了满足不同高度的作业需求,往往将机器人的长度设计得较长,体积庞大,升降空间有限,通过本实施例中的升降单元,有利于在保持机器人本身体积较小的前提下,灵活地完成位于不同高度的装修作业。可以理解的是,对于单一作业高度的应用场景来说,升降单元并不是必需的,其可根据不同的工业应用场景可选择地设置。
[0063]
传感单元用于对机器人本体和周围环境的信息进行采集,包括但不限于设置在作业执行部上的位移传感器103、位于移动基部500上的激光雷达和深度相机等。
[0064]
移动基部500、机械臂300、作业执行部100、升降单元400和传感单元均与所述控制单元200连接。在一个实施例中,控制单元200包括控制柜(图9a),安装在移动基部上部。控制柜的外部设置有显示屏,用于显示系统的实时运行状态以及对室内施工机器人进行操纵。如图9b、9c、9d所示,控制柜的内部放置空气压缩机201、数据采集卡202、电磁阀203、接线板204、plc205、立柱式升降电机驱动器207、机械臂控制柜208、工控机209、恒力补偿元件控制柜210和电源管理系统等,并预留有一定的配重空间,以调整机器人的整体平衡。其中,工控机209作为主控部件,与移动基部500、升降单元400、机械臂300、位移传感器、深度相机、plc205、电源管理系统、显示屏等功能模块均进行通讯连接。
[0065]
本实施例还提供了一种基于上述室内施工机器人的控制方法,包括以下步骤:
[0066]
s1、进行路径规划,控制所述机器人运动到路径的起始点;
[0067]
s2、检测位移传感器与墙面之间的距离,利用所述距离获取所述作业执行部与墙面的夹角进行误差补偿;
[0068]
s3、对墙面进行正式作业。
[0069]
具体工作过程和工作原理为:室内施工机器人进入室内后,通过底盘上的激光雷达进行路径规划,当路径规划完成后,室内施工机器人运动到路径的起始点;
[0070]
检测位移传感器与墙面之间的距离,将测得的距离数据ab和cd传输给数据采集卡,经过数据采集卡处理后传输给工控机,工控机根据接收的数据ab、cd和所述作业执行部的长度数据l,计算出夹具与墙面的夹角,并根据欧拉角与四元数之间的转换关系,将夹角转化为四元数传输给机械臂,机械臂通过接收的四元数调整姿态补偿夹具与墙面之间的夹角,使得夹具与墙面平行;
[0071]
在误差补偿工作完成后室内施工机器人对墙面进行正式作业。在室内施工机器人完成较低处的墙面工作后,室内施工机器人的升降单元工作,使得较高处的墙面处于机械的工作范围内,从而完成较高墙面的作业。
[0072]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1