一种钢构件焊接装置及其焊接方法与流程
1.本发明涉及焊接技术领域,具体涉及一种钢构件焊接装置及其焊接方法。
背景技术:
2.目前我国的建筑业发展迅速,钢材越来越频繁地被用于建筑物中。随着近年来钢材被越来越多地使用在高层建筑中,工程项目对于钢材的强度、防火性能以及抗震性能有了新的要求。
3.建筑钢结构中,h型钢、箱型梁、十字柱等,钢板与钢板的坡口主焊缝焊接,生产工艺是先对坡口进行二氧化碳气体保护焊接打底填充,再进行埋弧焊盖面,其中打底填充焊接,对焊接工艺要求较高,尤其针对厚板大坡口的多层多道焊接,对构件坡口尺寸精度及焊接工艺,需要精密控制,而目前钢结构生产现状,构件主要是非标定制,构件类型多样化,精度低,焊缝坡口尺寸规格多等因素,直接制约钢结构长焊缝打底填充焊接的高效稳定生产。
4.目前钢结构厂家针对长焊缝打底填充焊接主流生产模式主要是以人工和半自动设备为主,第一种采用人工手动焊接,工作环境恶劣,劳动强度大,效率低、焊接质量由工人技术水平和工作状态决定,不可控,第二种采用半自动化设备,焊接过程需要人工全程参与,设备及工艺调整对工人技术水平要求较高,操作复杂,焊接质量及设备的稳定性不可控,人工辅助时间较多,生产效率低。同时此种设备也是主要针对某种单一的产品类型h型钢或箱型构件的生产,无法解决目前钢结构构件非标定制,构件类型多样化、精度低生产问题。
技术实现要素:
5.1、发明要解决的技术问题
6.针对目前钢结构构件焊接质量低,焊接效率低的技术问题,本发明提供了一种钢构件焊接装置及其焊接方法,它可实现焊缝焊接质量,且焊接效率高。
7.2、技术方案
8.为解决上述问题,本发明提供的技术方案为:
9.一种钢构件焊接装置,包括:行走轴机构、胎架定位机构、机器人移动平台、六轴机器人、机器人控制柜、焊接电源、送丝机、冷却水箱、焊枪和3d相机;其中,所述六轴机器人安装在机器人移动平台上;所述送丝机和3d相机均安装在六轴机器人手臂上;所述焊枪安装在六轴机器人第六轴法兰盘上;所述焊接电源、冷却水箱和机器人控制柜均放置于机器人移动平台上;六轴机器人、机器人控制柜、送丝机、焊枪和3d相机均与焊接电源连接;六轴机器人、送丝机、焊枪和3d相机均与机器人控制柜连接;机器人移动平台安装在行走轴机构上,胎架定位机构位于行走轴机构侧面,用于定位钢构件。
10.本发明实施例机构装置结构较为简单,便于操作人员进行操作和控制。本发明实施例的机构装置发生故障的机率比较小,维修较为方便,在一定程度上可以降低维修费用。通过3d 视觉焊缝信息识别处理技术,可实现对不同类型构件、不同焊缝坡口尺寸规格,实
际坡口尺寸及位置信息采集,系统依据视觉采集的信息,自动规划焊接轨迹及焊接工艺参数。对3d 视觉采集的焊缝信息、自动生成设备工作程序,控制机器人自动执行焊接工作任务及依据实际生产坡口尺寸的变化对焊接工艺进行实时调整修正,实现构件的柔性化生产,解决传统手动或自动化设备生产构件非标化、多样化、及焊缝尺寸精度差等工艺难适应性问题,符合目前国内钢构件的加工工艺流程和要求。钢构件的零部件加工任务由原来的人工操作变为现有的机器人、地轨、变位机协同自动工作,降低工人劳动强度,技术水平,提高生产效率及焊接质量。
11.进一步的,胎架定位机构包括钢构件放置机架,所述钢构件放置机架用于定位钢构件,方便机器人对钢构件进行焊缝焊接。
12.进一步的,六轴机器人为多个,多个六轴机器人均与机器人控制柜连接。
13.进一步的,还包括视觉处理单元,所述视觉处理单元位于3d相机内,与3d相机输出端和机器人控制柜连接。
14.一种钢构件焊接方法,包括:s101、胎架定位机构定位钢构件;s102、机器人移动平台在行走轴机构沿钢构件长度方向移动至钢构件焊缝位置;s103、3d相机拍照采集构件焊缝照片,传输给视觉处理单元;s104、视觉处理单元对3d相机采集的构件焊缝照片进行实时处理,获得构件焊缝截面信息和所有待焊位置坐标;s105、视觉处理单元传输给机器人控制柜,匹配相应的焊接工艺参数和焊接轨迹,并分别传输给六轴机器人、送丝机和焊枪;s106、六轴机器人、送丝机和焊枪执行相应的焊接工艺参数和焊接轨迹,对焊缝进行焊接,焊接完成,重复步骤s102-s106。
15.进一步的,所述钢构件包括h型钢、箱型梁和十字柱。
16.进一步的,所述焊接工艺参数包括焊接电流、焊接电压、焊枪摆动频率幅度和焊接速度。
17.进一步的,所述焊接轨迹包括焊接层数和焊接道数,以及多层多道的每层每道的焊接起始点坐标。
18.进一步的,所述机器人控制柜中预存有不同焊缝信息下,对应的不同焊接工艺参数和焊接轨迹。
19.进一步的,所述钢构件焊缝包括h型钢、箱型梁的腹板与翼板连接的主焊缝。
20.3、有益效果
21.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
22.本发明实施例机构装置结构较为简单,便于操作人员进行操作和控制。本发明实施例的机构装置发生故障的机率比较小,维修较为方便,在一定程度上可以降低维修费用。通过3d 视觉焊缝信息识别处理技术,可实现对不同类型构件、不同焊缝坡口尺寸规格,实际坡口尺寸及位置信息采集,系统依据视觉采集的信息,自动规划焊接轨迹及焊接工艺参数。对3d 视觉采集的焊缝信息、自动生成设备工作程序,控制机器人自动执行焊接工作任务及依据实际生产坡口尺寸的变化对焊接工艺进行实时调整修正,实现构件的柔性化生产,解决传统手动或自动化设备生产构件非标化、多样化、及焊缝尺寸精度差等工艺难适应性问题,符合目前国内钢构件的加工工艺流程和要求。钢构件的零部件加工任务由原来的人工操作变为现有的机器人、地轨、变位机协同自动工作,降低工人劳动强度,技术水平,提高生产效率及焊接质量。
附图说明
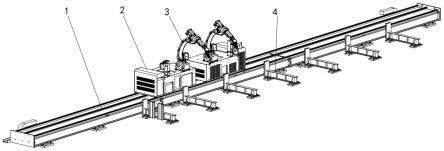
23.图1为本发明实施例提出的一种钢构件焊接装置的结构示意图之一。
24.图2为本发明实施例提出的一种钢构件焊接装置的结构示意图之二。
25.图3为本发明实施例提出的一种钢构件焊接方法流程示意图。
26.图4为本发明实施例提出的一种钢构件焊接装置的胎架定位机构的结构示意图。
具体实施方式
27.为进一步了解本发明的内容,结合附图及实施例对本发明作详细描述。
28.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。本发明中所述的第一、第二等词语,是为了描述本发明的技术方案方便而设置,并没有特定的限定作用,均为泛指,对本发明的技术方案不构成限定作用。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。同一实施例中的多个技术方案,以及不同实施例的多个技术方案之间,可进行排列组合形成新的不存在矛盾或冲突的技术方案,均在本发明要求保护的范围内。
29.实施例1
30.如图1和2所示,一种钢构件焊接装置,包括:行走轴机构1、胎架定位机构4、机器人移动平台2、六轴机器人3、机器人控制柜10、焊接电源8、送丝机5、冷却水箱9、焊枪6 和3d相机7;其中,所述六轴机器人3安装在机器人移动平台2上;所述送丝机5和3d相机7均安装在六轴机器人3手臂上;所述焊枪6安装在六轴机器人3第六轴法兰盘上;所述焊接电源8、冷却水箱9和机器人控制柜10均放置于机器人移动平台2上;六轴机器人3、机器人控制柜10、送丝机5、焊枪6和3d相机7均与焊接电源8连接;六轴机器人3、送丝机5、焊枪6和3d相机7均与机器人控制柜10连接;机器人移动平台2安装在行走轴机构 1上,胎架定位机构4位于行走轴机构1侧面,用于定位钢构件。
31.由人工将钢构件吊入胎架定位机构4,放置对准胎架的侧边和前端靠板,实现工件的定位功能。3d相机7采集工件焊缝信息,可实现适应不同规格构件的智能焊接,机器人控制柜 10根据不同规格构件的焊接工艺,自动匹配与3d相机7采集到的工件焊缝信息相匹配的焊接工艺步骤。
32.行走轴机构1是和机器人移动平台2底部适配的结构,以便机器人移动平台2在其上往复移动,比如可以是轨道结构,也可以是平面结构等情况,可以和机器人移动平台2底
部构造适配即可。
33.3d相机7采集到的工件焊缝信息传输到机器人控制柜10,匹配到相应的焊接工艺步骤,机器人控制柜10控制六轴机器人3的轴动作,控制送丝机5送焊丝,控制焊枪6对焊缝进行焊接;机器人控制柜10控制六轴机器人3在机器人移动平台3上边移动边焊接,完成对长焊缝的焊接过程。在焊接过程中,焊接电源为六轴机器人3、机器人控制柜10、送丝机5、焊枪6和3d相机7提供工作所需电源,冷却水箱起到冷却作用。
34.本实施例可适用于长焊缝、短焊缝等各类焊缝焊接作业工况,特别是复杂焊缝的作业工况,利用本装置的智能性可实现高效焊接,且焊接质量高。机器人控制柜10中预存有不同焊缝信息下,对应的不同焊接工艺参数,包括焊接电流、焊接电压、焊枪6摆动频率幅度、焊接速度、焊接层数、焊接道数等。以便和3d相机7采集工件焊缝信息相比较,从而生成与工件焊缝信息对应的焊接工艺步骤。
35.通过本发明实施例的焊缝智能焊接结构实现焊缝的自动化焊接,无需人工参与,焊接质量高,焊接效率高,且节省成本,特别是针对目前钢结构构件非标定制焊接,可实现构件类型多样化、精度高的技术效果。
36.本发明实施例的装置结构较为简单,便于操作人员进行操作和控制。本发明实施例的焊接装置,包含了固定不动的行走轴机构1;位于行走轴机构1一侧的结构稳固的胎架定位机构4;在行走轴机构1上移动的六轴机器人3,受益于这些组件集成化的构造方式,使得构成本实施例焊接装置的零碎组合部件较少,使用运行过程中发生故障的机率比较小,维修较为方便,在一定程度上可以降低维修费用。针对钢结构构件焊接,尤其是目前钢结构构件非标定制焊接,通过3d视觉焊缝信息识别处理技术,可实现对不同类型构件,不同焊缝坡口尺寸规格,实际坡口尺寸及位置信息采集,系统依据视觉采集的信息,自动规划焊接轨迹及焊接工艺参数。对3d视觉采集的焊缝信息、自动生成设备工作程序,控制机器人自动执行焊接工作任务及依据实际生产坡口尺寸的变化对焊接工艺进行实时调整修正,实现构件的柔性化生产,解决传统手动或自动化设备生产构件非标化、多样化、及焊缝尺寸精度差等工艺难适应性问题,符合目前国内钢构件的加工工艺流程和要求。钢构件的零部件加工任务由原来的人工操作变为现有的机器人、地轨、变位机协同自动工作,降低工人劳动强度,技术水平,提高生产效率及焊接质量。
37.胎架定位机构4,如图4所示,包括若干钢结构放置机架41,钢结构放置机架41的使用数量根据待加工钢构件(工件)长度确定,相邻钢结构放置机架41之间的距离及单一钢结构放置机架41的高度等构造尺寸,一方面考虑钢构件长度,另一方面,需要兼顾考虑本发明实施例焊接装置中机器人移动平台2的移动空间,六轴机器人3的作业空间等因素综合确定,以方便移动平台2移动,以及六轴机器人3的焊接作业空间,方便两者自如动作,以便顺利进行焊接。钢结构放置机架41包括端板42、底板44、加强板45和底座46;其中,底板44 一端设有侧板43,侧板用于定位工件侧边位置,用于确定工件的宽度尺寸;底板44和底座 46之间设有若干加强板45,确定了工件放置的高度位置,该高度需要和机器人移动平台2以及六轴机器人3的作业高度和空间相匹配,以便对工件不同部位进行焊接加工。对于用来放置钢构件端部的一个钢结构放置机架41而言,还包括侧板43,若干侧板43设于沿底板44 长度方向一侧,用于确定钢结构的加工起始位置和结束位置,用于确定工件长度方向的尺寸。
38.钢结构放置机架41沿行走轴机构1长度方向侧面放置,如图1所示,机器人移动平
台2 和六轴机器人3配合,沿行走轴机构1移动,根据钢构件的加工需求,分别对钢构件上的不同部位一一进行焊接作业。
39.在本实施例的焊接装置安装时,需要将胎架定位机构4的若干钢构件放置机架41,相对于行走轴机构1、机器人移动平台2和六轴机器人3进行定位固定,以便钢结构放置其上之后,放置对准胎架定位机构4的侧边和端板,实现工件的准确定位,从而便于进一步的焊接加工作业,方便六轴机器人3对钢构件进行焊缝焊接。
40.3d相机7为多个,多个3d相机7均安装于六轴机器人3手臂上,多个3d相机7的镜头拍摄朝向各不相同。用于实现对工件各个角度方向的焊缝信息采集,以便全面性采集工件焊缝信息。
41.六轴机器人3为多个,多个六轴机器人3均与机器人控制柜10连接。六轴机器人3的数量可以为多个,多个六轴机器人3均与3d相机7连接,利用3d相机7采集的工件焊缝信息,多个六轴机器人3分别同时各负责一条焊缝的焊接,可同时实现构件的两条主焊缝焊接。
42.还包括视觉处理单元,所述视觉处理单元位于3d相机7内,与3d相机7输出端和机器人控制柜10连接。视觉处理单元对3d相机7采集照片进行处理,提取工件焊缝信息传输给机器人控制柜10。
43.实施例2
44.本实施例提出了一种钢构件焊接方法,如图3所示,包括:
45.s101、胎架定位机构4定位钢构件;
46.s102、机器人移动平台2在行走轴机构1沿钢构件长度方向移动至钢构件焊缝位置;
47.s103、3d相机7拍照采集构件焊缝照片,传输给视觉处理单元;
48.s104、视觉处理单元对3d相机7采集的构件焊缝照片进行实时处理,获得构件焊缝截面信息和所有待焊位置坐标;
49.s105、视觉处理单元传输给机器人控制柜10,匹配相应的焊接工艺参数和焊接轨迹,并分别传输给六轴机器人3、送丝机5和焊枪6;
50.s106、六轴机器人3、送丝机5和焊枪6执行相应的焊接工艺参数和焊接轨迹,对焊缝进行焊接,焊接完成,重复步骤s102-s106。
51.钢构件包括h型钢、箱型梁和十字柱。焊接工艺参数包括焊接电流、焊接电压、焊枪6 摆动频率幅度和焊接速度。焊接轨迹包括焊接层数和焊接道数,以及多层多道的每层每道的焊接起始点坐标。机器人控制柜10中预存有不同焊缝信息下,对应的不同焊接工艺参数和焊接轨迹;适用的钢构件焊缝包括但不限于h型钢、箱型梁的腹板与翼板连接的主焊缝。
52.通过上述结构和方法主要实现对钢结构工件主焊缝机器人二氧化碳气保焊打底焊接,机器人控制柜10里的系统依据构件及坡口信息建立了对应的焊接数据库(包括多层多道焊接),所述焊接数据库,是通过对钢构件各种不同焊缝坡口截面和焊接轨迹信息,进行大量现场焊接工艺测试及生产使用验证的经验数据积累,形成工艺数据文件库保存在系统内,视觉处理模块采集钢构件实际焊缝坡口截面和焊接轨迹信息,系统依据焊缝坡口截面和焊接轨迹信息在焊接数据库查找相对应工艺数据,并调用焊接工艺参数,生成焊接轨迹及焊接工艺参数的机器人工作程序,机器人自动执行焊接等工作任务,整个系统结构主
要由胎架定位模块、行走轴机构、机器人移动平台、焊接机器人、3d相机7组成。
53.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1