一种应用于桁架机器人的磁吸式手爪末端执行器
1.本发明涉及工业机器人抓取技术领域,具体为一种应用于桁架机器人的磁吸式手爪末端执行器。
背景技术:
2.绝大多数桁架机器人末端执行器都是针对某一特定场所而专门设计,缺乏通用性,市面上存在的上下料桁架机器人末端执行部件一般采用单或双手爪的形式,对于抓取重心不平稳的工件并不适用。
3.现存的机器人手爪一般采用夹爪或电磁铁吸盘,考虑到存在堆码的工件之间上下间隙小,使用夹爪无法插入缝隙成功抓取,并且抓取的单个重量大的重型工件,若仅采用电磁铁吸盘作为末端执行器,需选择大功率电磁铁型号,耗电量大,且在运输过程中还存在突然断电导致工件掉落的风险。因此,设计了一种应用于桁架机器人的磁吸式手爪末端执行器。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种应用于桁架机器人的磁吸式手爪末端执行器,解决了上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种应用于桁架机器人的磁吸式手爪末端执行器,包括机架、动力装置、桁架机器人z轴末端、升降台、转动机构、平移箱、两组调节机构、四组升降抓杆和与升降抓杆相对应的执行机构,所述动力装置设于所述机架梁上,所述桁架机器人z轴末端设于所述机架之间,所述动力机构用于驱动所述桁架机器人z轴末端沿x轴或y轴进行平面移动定位并进行上下料;
8.所述桁架机器人z轴末端下端固定安装有回转支撑台,所述升降台设于所述回转支撑台下侧,所述转动机构设于所述回转支撑台上,所述转动机构用于驱动所述升降台相对所述回转支撑台转动;
9.所述平移箱设有两组且分别设于所述回转支撑台两侧,所述升降台两侧分别延伸至两个所述平移箱内,所述平移箱与位于所述平移箱内的所述升降台之间固定连接,两组所述调节机构分别设于两个所述平移箱内,四组所述升降抓杆两两安装于两个所述平移箱内,所述调节机构用于调节位于同一所述平移箱内的所述升降抓杆之间的间距,所述执行机构分别设于所述升降抓杆下方,所述执行组件用于对物件进行夹持,所述执行机构通过所述平移箱内的光信号控制其自身的工作状态。
10.优选的,所述转动机构包括回转齿盘和回转齿轮,所述回转齿盘转动连接于所述回转支撑台上,所述回转齿轮啮合设于所述回转齿盘一侧,所述回转齿轮上侧动力连接有转动电机,所述转动电机固定安装于所述回转支撑台内,所述回转齿盘下端动力连接与所
述升降台上端面。
11.优选的,所述调节机构包括调节导轨、调节滑台、调节滑块、光敏组件和滑台连接块,所述平移箱内位于其长边处固定安装有若干加强筋,每侧所述加强筋的数量至少为两组,所述调节导轨固定安装于同侧所述加强筋之间,所述调节滑台设有四组且两两设于两个所述平移箱内,所述调节滑台对称设置于两侧所述调节导轨之间,所述调节滑块设于所述调节滑台与所述调节导轨外表面之间,所述调节滑台通过所述调节滑块与所述调节导轨之间相对滑动,所述调节滑台上表面固定安装有滑台连接块,所述平移箱内固定安装有与所述滑台连接块相对应的调节气缸,位于同一个所述平移箱内的两个所述调节滑台上端面相互远离一侧均安装有升降台侧板,所述光敏组件安装于所述升降台侧板上。
12.优选的,所述光敏组件包括光电开关和反光板,所述光电开关与所述反光板分别对称设于所述升降台侧板上,一个所述升降台侧板对应一个所述光电开关以及一个所述反光板,所述升降抓杆与所述光敏组件相对应,所述升降抓杆设于所述光电开关与所述反光板之间,所述升降抓杆与所述调节滑台之间通过所述直线轴承装配,所述升降抓杆下端延伸至所述调节滑台下方,所述升降抓杆外圆面上方套设有光轴套。
13.优选的,所述升降抓杆外表面固定套设有尼龙限位垫圈,所述尼龙限位垫圈位于所述直线轴承上侧且位于所述光轴套下侧。
14.优选的,所述执行机构包括电磁铁安装板、电磁铁、夹爪安装支架、抓取组件,所述电磁铁安装板设于所述升降抓杆下侧,所述电磁铁安装板上端面固定安装有铰接件,所述铰接件中心处与所述升降抓杆下端相铰接,所述电磁铁固定安装于所述电磁铁安装板下侧,所述夹爪安装支架固定设于所述升降抓杆外表面下侧,所述抓取组件通过所述夹爪安装支架与所述升降抓杆之间进行装配。
15.优选的,所述抓取组件包括固定安装于夹爪安装支架其中一侧的带磁叶片旋转气缸,所述带磁叶片旋转气缸内动力连接有带磁夹爪。
16.优选的,所述带磁夹爪数量与所述升降抓杆相对应,每个所述平移箱下方的两个所述带磁夹爪之间转动方向相反。
17.优选的,所述电磁铁与供电设备电性连接,所述桁架机器人z轴末端上设有工业相机拍摄系统,所述工业相机拍摄系统与供电设备电性连接。
18.(三)有益效果
19.本发明提供了一种应用于桁架机器人的磁吸式手爪末端执行器。具备以下有益效果:
20.1、本方案通过电磁铁执行抓取作业并配有带磁夹爪进行运输上料作业的方式,使桁架机器人在搬运和上料过程中,电磁铁可以处于断电状态,节约电力,并可以无需考虑电磁铁在运输过程中还存在突然断电导致工件掉落的风险,同时相较于依赖单一的卡爪或电磁铁的抓取方式,提高执行器的通用性和灵活性。
21.2、本方案通过直线轴承使带磁夹爪与调节滑台进行装配,在电磁铁与工件表面接触后,使升降抓杆对光电开关进行柔性反馈,提高带磁夹爪作业过程的灵敏性,同时避免升降抓杆对调节滑台撞击所产生的损伤,提高系统稳定性及上料动作的效率。
22.3、本方案通过设置的调节机构改变同侧两个带磁夹爪之间的间距,进而满足桁架机器人对不同工件及型号抓取尺寸的兼容性,提高设备通用性。
附图说明
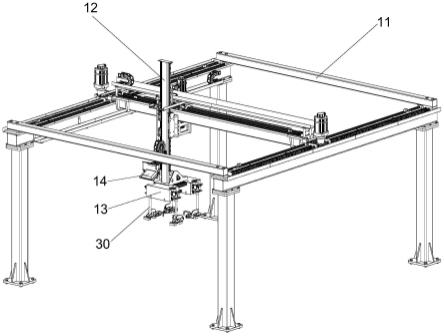
23.图1为本发明的主视结构示意图;
24.图2为本发明中桁架机器人z轴末端及部分结构示意图;
25.图3为本发明中转动机构的后视结构示意图;
26.图4为本发明中调节机构以及执行机构的结构示意图;
27.图5为本发明中调节机构以及执行机构的爆炸示意图;
28.图6为本发明中执行机构的结构示意图;
29.图7为本发明中的带磁夹爪在工作状态下的点位示意图。
30.图中:11、机架;12、桁架机器人z轴末端;13、平移箱;14、工业相机拍摄系统;15、回转支撑台;16、回转齿盘;17、回转齿轮;20、升降台;21、升降台侧板;22、调节滑台;23、调节导轨;24、调节气缸;25、加强筋;26、调节滑块;27、滑台连接块;28、光电开关;29、反光板;30、升降抓杆;31、直线轴承;32、铰接件;33、电磁铁安装板;34、电磁铁;35、夹爪安装支架;36、带磁叶片旋转气缸;37、带磁夹爪;41、尼龙限位垫圈。
具体实施方式
31.本发明实施例提供一种应用于桁架机器人的磁吸式手爪末端执行器,如图1-7所示,包括机架11、动力装置、桁架机器人z轴末端12、升降台20、转动机构、平移箱13、两组调节机构、四组升降抓杆30和与升降抓杆30相对应的执行机构,动力装置设于机架11梁上,桁架机器人z轴末端12设于机架11之间,动力机构用于驱动桁架机器人z轴末端12沿x轴或y轴进行平面移动定位并进行上下料。
32.桁架机器人z轴末端12下端固定安装有回转支撑台15,升降台20设于回转支撑台15下侧,转动机构设于回转支撑台15上,转动机构用于驱动升降台20相对回转支撑台15转动。
33.平移箱13内部中空且设有两组,两组平移箱13分别设于回转支撑台15两侧,升降台20两侧分别延伸至两个平移箱13内,平移箱13与位于平移箱13内的升降台20之间固定连接,两组调节机构分别设于两个平移箱13内,如图4所示,四组升降抓杆30两两安装于两个平移箱13内,调节机构用于调节位于同一平移箱13内的升降抓杆30之间的间距,执行机构分别设于升降抓杆30下方,执行组件用于对物件进行夹持,执行机构通过平移箱13内的光信号控制其自身的工作状态。
34.物料具体为叉车工件。
35.如图3所示,转动机构包括回转齿盘16和回转齿轮17,回转齿盘16转动连接于回转支撑台15上,回转齿轮17啮合设于回转齿盘16一侧,回转齿轮17上侧动力连接有转动电机,转动电机固定安装于回转支撑台15内,回转齿盘16下端动力连接与升降台20上端面。
36.转动电机驱动回转齿轮17转动,回转齿轮17通过轮齿啮合带动回转齿盘16转动,进而带动升降台20相对回转支撑台15转动。
37.如图5所示,调节机构包括调节导轨23、调节滑台22、调节滑块26、光敏组件和滑台连接块27,平移箱13内位于其长边处固定安装有若干加强筋25,每侧加强筋25的数量至少为两组,调节导轨23固定安装于同侧加强筋25之间,调节滑台22设有四组且两两设于两个平移箱13内,调节滑台22对称设置于两侧调节导轨23之间,调节滑块26设于调节滑台22与
调节导轨23外表面之间,调节滑台22通过调节滑块26与调节导轨23之间相对滑动,调节滑台22上表面固定安装有滑台连接块27,平移箱13内固定安装有与滑台连接块27相对应的调节气缸24,调节气缸24通过控制其动力端伸缩使伸缩滑台连接块27带动调节滑台22移动,位于同一个平移箱13内的两个调节滑台22上端面相互远离一侧均安装有升降台侧板21,光敏组件安装于升降台侧板21上。
38.光敏组件包括光电开关28和反光板29,光电开关28与反光板29分别对称设于同一侧的升降台侧板21上,调节滑台22上端面设有支撑件,升降台20固定安装于升降台侧板21上并由调节滑台22上端面的支撑件进行支撑,一个升降台侧板21对应一个光电开关28以及一个反光板29,升降抓杆30与光敏组件相对应,升降抓杆30设于光电开关28与反光板29之间,升降抓杆30与调节滑台22之间通过直线轴承31装配,升降抓杆30下端延伸至调节滑台22下方,升降抓杆30外圆面上方套设有光轴套。
39.直线轴承31外侧与调节滑台22进行装配,直线轴承31内侧与升降抓杆30外圆面进行装配,直线轴承31通过自身的物理特性使升降抓杆30在相对调节滑台22上升的过程进行缓冲。
40.光电开关28内设有光源,反光板29反射光电开关28发出的光信号并使其反射回光电开关28内,光电开关28通过识别反射回的光信号的状态进行改变电磁铁34的工作状态。
41.如图6所示,升降抓杆30外表面固定套设有尼龙限位垫圈41,尼龙限位垫圈41位于直线轴承31上侧且位于光轴套下侧,尼龙限位垫圈41对升降抓杆30的滑动区间进行限制。
42.执行机构包括电磁铁安装板33、电磁铁34、夹爪安装支架35、抓取组件,电磁铁安装板33设于升降抓杆30下侧,电磁铁安装板33上端面固定安装有铰接件32,铰接件32中心处与升降抓杆30下端相铰接,值得注意的是,由于叉车工件电磁铁34固定安装于电磁铁安装板33下侧,夹爪安装支架35固定设于升降抓杆30外表面下侧,抓取组件通过夹爪安装支架35与升降抓杆30之间进行装配,抓取组件用于对工件进行二次固定。
43.抓取组件包括固定安装于夹爪安装支架35其中一侧的带磁叶片旋转气缸36,带磁叶片旋转气缸36内动力连接有带磁夹爪37。
44.带磁夹爪37数量与升降抓杆30相对应,每个平移箱13下方的两个带磁夹爪37之间转动方向相反。
45.电磁铁34与供电设备电性连接,桁架机器人z轴末端12上设有工业相机拍摄系统14,工业相机拍摄系统14与供电设备电性连接,工业相机拍摄系统14获取图像并通过图像识别找到工件的重心,如图7所示,当l点(l点为四个带磁夹爪37所构成的矩形图形的重心)与叉车重心投影于叉车上表面所形成平面内的质点重合时,即可判断此时带磁夹爪37的位置为最优抓取位置。
46.当桁架机器人z轴末端12带动回转支撑台15以及升降台20下降时,升降台20通过平移箱13内的调节气缸24带动四个升降抓杆30下降,升降抓杆30通过电磁铁安装板33使电磁铁34下端面与最上侧的叉车表面相抵,由于位于最上侧的叉车处于堆叠状态,导致其上表面为倾斜状态,此时叉车表面与电磁铁34相抵,进而将铰接件32扭转,此时桁架机器人z轴末端12继续带动回转支撑台15以及升降台20下降,叉车表面通过反作用力使升降抓杆30相对调节滑台22向上移动,升降抓杆30带动其上侧的光轴套上升至光电开关28与反光板29之间,此时,光电开关28无法接收到反光板29反射回的光信号,进而控制电磁铁34通电。
47.电磁铁34将电能转变磁力,进而吸附叉车工件,此时,控制桁架机器人z轴末端12上升,进而带动叉车与其下方的叉车堆远离,当叉车工件远离叉车堆至预设的高度后,叉车工件通过重力使铰接件32重新摆动回水平状态,此时带磁叶片旋转气缸36启动,带磁叶片旋转气缸36带动带磁夹爪37转动,进而对叉车工件底部进行抓取。
48.当抓取完成后,电磁铁34断电,由带磁夹爪37进行运送,当带磁夹爪37将叉车工件运送至传送物料处后,转动电机启动,转动电机通过回转齿盘16带动升降台20转动180
°
,进而调整工件的下放方向。
49.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1