一种智能轨道巡检机器人的制作方法
1.本发明涉及机器人技术领域,具体为一种智能轨道巡检机器人。
背景技术:
2.随着劳动力市场供给减少,部分高危行业面临劳动力短缺的实际。这可能成为机器人很快“上岗”的又一推动因素,传统人工巡检盘点缺点有:工作量大、人手不够,时效性不高,人工巡检盘点费时费力,无法做到大数据计算分析提前预警,巡检盘点任务项目多、巡检盘点目标物活动速度快等因素导致巡检任务无法完成,固定式监控盘点缺点:存在着一定范围的视觉盲点,人工巡检配合少量环境监控器监控的方式容易因监测不到位而造成部分设备缺陷或异常发展,甚至引发设备障碍和故障,影响电网安全供电。
3.相对于人工巡检,智能巡检机器人具有可全天候运行和对恶劣环境的适应性更强的优势。根据预先设定的巡检内容、时间、周期、路线等参数信息,自主启动完成例行巡检任务,根据报警级别、事项来源等分类存储并实现智能告警,有效的减轻运维人员工作量,提高巡检效率
4.申请号cn202121386030.2的专利就公开了一种新型轨道巡检机器人的行走机构,机器人三组滚轮架在工字梁的轨道上。机身对称分布三对滚轮,两对无动力的从动滚轮,处于前后端,一对驱动滚轮处于机身中间位置,通过驱动电机带动链条传导至这对驱动滚轮,从而实现机器人的行走。但因机器人自身较重,爬坡时机器人会因前后两对从动滚轮架空,导致爬坡失败;在轨道表面上有杂物或者灰尘时,机身容易倾斜,机器人容易跑偏,影响巡检镜头的拍摄;三组滚轮尺寸都较大,使得整体尺寸随之增大,看起来很笨重,不美观;两对前后从动轮也固定了机器人相应的转弯半径,无法做到灵活多变;编码器与从动轮联动,会因轨道面有杂物或其他原因导致测试数据不准确,所以我们提出了一种智能轨道巡检机器人,以便于解决上述中提出的问题。
技术实现要素:
5.本发明的目的在于提供一种智能轨道巡检机器人,以解决上述背景技术提出的目前市场上机器人自身较重,爬坡时机器人会因前后两对从动滚轮架空,导致爬坡失败;轨道表面上有杂物或者灰尘时,机身容易倾斜,机器人容易跑偏,影响巡检镜头的拍摄;三组滚轮尺寸都较大,使得整体尺寸随之增大,看起来很笨重,不美观;两对前后从动轮也固定了机器人相应的转弯半径,无法做到灵活多变;编码器与从动轮联动,会因轨道面有杂物或其他原因导致测试数据不准确的问题。
6.为实现上述目的,本发明提供如下技术方案:一种智能轨道巡检机器人,包括运行轨道、行动机构、从动机构、编码轮机构、设备盒、外置充电机构和检测机构,所述行动机构与运行轨道相配合,所述编码轮机构处于运行轨道的下方,所述设备盒处于行动机构的两侧,所述检测机构处于机器人最下方,且检测机构连接于设备盒的下方。
7.优选的,所述运行轨道包括轨道连接角钢、轨道、调节螺杆、轨道固定架、rfid标
记、霍尔传感器标记和槽条连接件,所述轨道连接角钢设置在轨道的上表面,所述调节螺杆设置在轨道连接角钢的上表面,所述轨道固定架与调节螺杆相连接,所述rfid标记与霍尔传感器标记分别设置在轨道的上表面,所述轨道的连接处设置有槽条连接件,所述轨道通过槽条连接件构成一体化结构,所述轨道连接角钢对称设置在轨道的上表面,且轨道连接角钢与轨道之间为固定连接,所述调节螺杆与轨道连接角钢之间为轴承连接,所述轨道固定架与调节螺杆之间为螺纹连接,所述rfid标记、霍尔传感器标记与轨道之间均为固定连接。
8.优选的,所述行动机构包括驱动轮、驱动轴、电机固定板、减速电机、中间旋转轴、固定板旋转轴、顶轴限位块、限位螺栓以及调节弹簧,所述电机固定板的上表面设置有驱动轴,所述驱动轴的外表面设置有驱动轮,所述驱动轴的侧面设置有固定板旋转轴,所述固定板旋转轴的侧面设置有中间旋转轴,所述电机固定板的侧面设置有顶轴限位块,所述顶轴限位块的外表面设置有限位螺栓,所述顶轴限位块与电机固定板之间连接有调节弹簧,所述电机固定板的底部设置有减速电机,所述减速电机与电机固定板之间为固定连接,所述中间旋转轴、驱动轴、固定板旋转轴与电机固定板之间为旋转连接,所述顶轴限位块通过调节弹簧与电机固定板之间构成左右移动结构。
9.优选的,所述从动机构包括从动轮固定板、从动轮支撑板和从动轮,所述从动轮支撑板设置在从动轮固定板的两侧,且从动轮支撑板与从动轮固定板之间为固定连接,所述从动轮分别设置在从动轮固定板以及从动轮支撑板上。
10.优选的,所述编码轮机构包括编码轮固定架、编码轮、编码器、弹簧、弹簧盒、弹簧限位块和机器人总固定板,所述弹簧盒设置在机器人总固定板的底面,且弹簧盒与机器人总固定板之间为固定连接,所述弹簧限位块与弹簧均设置在弹簧盒的内部,且弹簧限位块通过弹簧在弹簧盒的内部构成上下升降结构,所述编码轮固定架与弹簧限位块相连接,所述编码轮以及编码器均与编码轮固定架之间为固定连接。
11.优选的,所述设备盒的下方设置有下固定板,所述设备盒的内部设置有电路安装板,所述设备盒上设置有充电受电端,所述设备盒与下固定板之间为固定连接,所述电路安装板与设备盒的内表面之间为固定连接,所述充电受电端与设备盒之间为固定连接。
12.优选的,所述外置充电机构包括充电桩支架、充电桩外壳、充电发射端和充电发射端固定盒,所述充电桩外壳与充电桩支架之间为固定连接,所述充电发射端设置在充电发射端固定盒的内部,且充电发射端与充电发射端固定盒之间为固定连接,所述充电发射端固定盒与充电桩支架之间为可拆卸连接。
13.优选的,所述检测机构包括下固定板、云台连接板、云台固定板、云台、气体检测传感器、拾音器和喇叭,所述气体检测传感器、拾音器和喇叭均设置在下固定板的上表面,且气体检测传感器、拾音器和喇叭与下固定板之间为固定连接,所述云台固定板以及云台连接板均与下固定板之间为固定连接,所述云台与云台固定板之间为固定连接。
14.与现有技术相比,本发明的有益效果是:该智能轨道巡检机器人通过rfid标记和霍尔传感器标记以及可适应轨道的编码轮机构,可以做到准确实时的定位,充电,计算移动位移。同时通过双光谱mini云台的多角度拍摄和热成像获取,可以更好地对不同场景进行实时检测;加上各类检测传感器,提高了机器人整体的应用范围。左右两侧的设备盒,可以相对独立拆装各类电路板和控制器,更好地做到了机械件和电气件的关联性和独立性。
附图说明
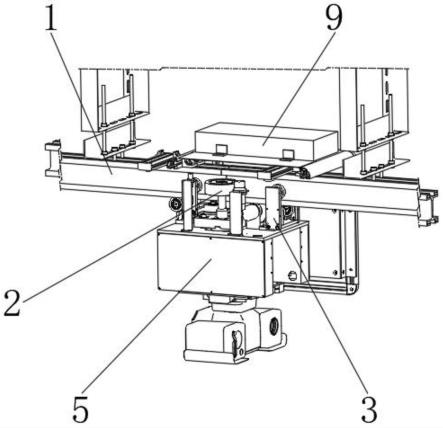
15.图1为本发明一种智能轨道巡检机器人整体结构示意图;
16.图2为本发明一种智能轨道巡检机器人轨道结构示意图;
17.图3为本发明一种智能轨道巡检机器人图2中a处结构示意图;
18.图4为本发明一种智能轨道巡检机器人行动结构示意图;
19.图5为本发明一种智能轨道巡检机器人行动结构主视示意图;
20.图6为本发明一种智能轨道巡检机器人行动结构侧视示意图;
21.图7为本发明一种智能轨道巡检机器人编码轮结构主视示意图;
22.图8为本发明一种智能轨道巡检机器人编码轮结构侧视示意图;
23.图9为本发明一种智能轨道巡检机器人从动结构装配示意图;
24.图10为本发明一种智能轨道巡检机器人第一从动结构立体示意图;
25.图11为本发明一种智能轨道巡检机器人第二从动结构立体示意图;
26.图12为本发明一种智能轨道巡检机器人从动结构主剖示意图;
27.图13为本发明一种智能轨道巡检机器人设备盒结构立体示意图;
28.图14为本发明一种智能轨道巡检机器人充电桩结构立体示意图;
29.图15为本发明一种智能轨道巡检机器人充电桩结构主视示意图。
30.图中:1、运行轨道;101、轨道连接角钢;102、轨道;103、调节螺杆;104、轨道固定架;105、rfid标记;106、霍尔传感器标记;107、槽条连接件;2、行动机构;201、驱动轮;202、驱动轴;203、电机固定板;204、减速电机;205、中间旋转轴;206、固定板旋转轴;207、顶轴限位块;208、限位螺栓;209、调节弹簧;3、从动机构;301、从动轮固定板;302、从动轮支撑板;303、从动轮;4、编码轮机构;401、编码轮固定架;402、编码轮;403、编码器;404、弹簧;405、弹簧盒;406、弹簧限位块;407、机器人总固定板;5、设备盒;6、下固定板;7、电路安装板;8、充电受电端;9、外置充电机构;901、充电桩支架;902、充电桩外壳;903、充电发射端;904、充电发射端固定盒;10、检测机构;1001、云台连接板;1002、云台固定板;1003、云台;1004、气体检测传感器;1005、拾音器;1006、喇叭。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.请参阅图1-15,本发明提供一种技术方案:一种智能轨道巡检机器人,包括运行轨道1、行动机构2、从动机构3、编码轮机构4、设备盒5、外置充电机构9和检测机构10,行动机构2与运行轨道1相配合,编码轮机构4处于运行轨道1的下方,设备盒5处于行动机构2的两侧,检测机构10处于机器人最下方,且检测机构10连接于设备盒5的下方。
33.运行轨道1包括轨道连接角钢101、轨道102、调节螺杆103、轨道固定架104、rfid标记105、霍尔传感器标记106和槽条连接件107,轨道连接角钢101设置在轨道102的上表面,调节螺杆103设置在轨道连接角钢101的上表面,轨道固定架104与调节螺杆103相连接,rfid标记105与霍尔传感器标记106分别设置在轨道102的上表面,轨道102的连接处设置有
槽条连接件107,轨道102通过槽条连接件107构成一体化结构,轨道连接角钢101对称设置在轨道102的上表面,且轨道连接角钢101与轨道102之间为固定连接,调节螺杆103与轨道连接角钢101之间为轴承连接,轨道固定架104与调节螺杆103之间为螺纹连接,使调节螺杆103可以带动轨道固定架104进行上下移动,rfid标记105、霍尔传感器标记106与轨道102之间均为固定连接。
34.行动机构2包括驱动轮201、驱动轴202、电机固定板203、减速电机204、中间旋转轴205、固定板旋转轴206、顶轴限位块207、限位螺栓208以及调节弹簧209,电机固定板203的上表面设置有驱动轴202,驱动轴202的外表面设置有驱动轮201,驱动轴202的侧面设置有固定板旋转轴206,固定板旋转轴206的侧面设置有中间旋转轴205,电机固定板203的侧面设置有顶轴限位块207,顶轴限位块207的外表面设置有限位螺栓208,顶轴限位块207与电机固定板203之间连接有调节弹簧209,电机固定板203的底部设置有减速电机204,减速电机204与电机固定板203之间为固定连接,中间旋转轴205、驱动轴202、固定板旋转轴206与电机固定板203之间为旋转连接,顶轴限位块207通过调节弹簧209与电机固定板203之间构成左右移动结构。
35.从动机构3包括从动轮固定板301、从动轮支撑板302和从动轮303,从动轮支撑板302设置在从动轮固定板301的两侧,且从动轮支撑板302与从动轮固定板301之间为固定连接,从动轮303分别设置在从动轮固定板301以及从动轮支撑板302上。
36.编码轮机构4包括编码轮固定架401、编码轮402、编码器403、弹簧404、弹簧盒405、弹簧限位块406和机器人总固定板407,弹簧盒405设置在机器人总固定板407的底面,且弹簧盒405与机器人总固定板407之间为固定连接,弹簧限位块406与弹簧404均设置在弹簧盒405的内部,且弹簧限位块406通过弹簧404在弹簧盒405的内部构成上下升降结构,编码轮固定架401与弹簧限位块406相连接,编码轮402以及编码器403均与编码轮固定架401之间为固定连接。
37.设备盒5的下方设置有下固定板6,设备盒5的内部设置有电路安装板7,设备盒5上设置有充电受电端8,设备盒5与下固定板6之间为固定连接,电路安装板7与设备盒5的内表面之间为固定连接,充电受电端8与设备盒5之间为固定连接。
38.外置充电机构9包括充电桩支架901、充电桩外壳902、充电发射端903和充电发射端固定盒904,充电桩外壳902与充电桩支架901之间为固定连接,充电发射端903设置在充电发射端固定盒904的内部,且充电发射端903与充电发射端固定盒904之间为固定连接,充电发射端固定盒904与充电桩支架901之间为可拆卸连接。
39.检测机构10包括下固定板6、云台连接板1001、云台固定板1002、云台1003、气体检测传感器1004、拾音器1005和喇叭1006,气体检测传感器1004、拾音器1005和喇叭1006均设置在下固定板6的上表面,且气体检测传感器1004、拾音器1005和喇叭1006与下固定板6之间为固定连接,云台固定板1002以及云台连接板1001均与下固定板6之间为固定连接,云台1003与云台固定板1002之间为固定连接。
40.本实施例的工作原理:在使用该智能轨道巡检机器人时,首先机器人工作时,两个集成式伺服驱动电机启动带动驱动轴202和驱动轮201,两个电机的旋转方向相反。通过顺时针旋转限位螺栓208,让中间旋转轴205在机器人总固定板407上的导向凹槽中向后位移,中间旋转轴205位移的同时带动两侧的电机固定板203做对称的摆动运动,进而轨道102两
侧的驱动轮201会夹紧轨道102,驱动轮201与轨道102间的摩擦力随之调节后增大,利用其摩擦力带动整体机器人向前或者向后运动。
41.机器人的前后从动机构3上的从动轮303挂在轨道102表面,用以抵消机器人自身重力,在机器人运动时,遇到轨道102的上坡、下坡、转弯时,从动机构3的限位机构对机器人本体做到左右的限位和上下的限位,以免机器人脱轨危害发生。上下限位机构通过弹簧404和扭簧,限位机构上的从动轮303抵住轨道102下表面,以免机器人上浮或者上下抖动的情况出现。左右限位机构通过限位轮和限位支架抵住轨道102的两侧。
42.机器人在轨道102上运动时,根据轨道102总长设定rfid标记105,机器人每经过一个rfid标记105时,机器人自身便记录一个数据,从而可以得到一个连续的数据。同时配合编码轮机构4可以随时记录或者得到机器人所处轨道102具体位置信息。最后在设定好外置充电机构9和霍尔传感器标记106后,机器人在电量不足时,根据rfid标记105判断充电桩大概位置,缓慢移动至充电桩,待霍尔传感器感应到标记点后,机器人到达充电位进行充电。正常进行巡检任务时,根据各类传感器反馈的信息,实时更新现场数据,双光云台会在机器人移动的同时时刻拍摄记录现场情况。
43.机器人的控制主要通过机器人内部wifi模块和巡检现场无线基站,通过监控室的网络和现场网络的对接,监控室就可直接得到现场的实时数据和画面,从而操作人员根据现场的情况可以对机器人进行远程操控。另外,机器人内部也包含对讲模块,这样在机器人进行巡检工作时,现场的人员也可以和监控室的操作人员进行实时对讲,以上就是该装置的工作原理,且本说明书中未作详细描述的内容均属于本领域专业技术人员公知的现有技术。
44.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1