半导体设备的工艺腔室的制作方法
1.本发明涉及半导体设备技术领域,具体地,涉及一种半导体设备的工艺腔室。
背景技术:
2.目前,一些例如刻蚀机(etch)等半导体真空设备的工艺腔室包括腔室本体、内门(inner door)、承载部件和顶针组件。其中,腔室本体用于为半导体工艺提供工艺环境,腔室本体设置有供晶圆传输的传输通道,承载部件设置在腔室本体内,用于承载晶圆进行半导体工艺,内门设置在腔室本体内,并与传输通道对应设置,用于在半导体工艺中关闭传输通道,并在晶圆的传输过程中开启传输通道,顶针组件设置在承载部件的内部,并贯穿承载部件至承载部件承载晶圆的表面,用于在机械手与承载部件之间传递晶圆。
3.通常,内门、顶针组件和机械手需要配合工作,以能够顺利的完成晶圆的传输,但是,为了避免内门、顶针组件和机械手的配合失误,需要在内门的驱动、顶针组件的驱动和机械手的驱动之间设置延迟时间,导致半导体设备的工作效率较差,并且,由于内门的驱动是由气缸来实现的,而气缸的驱动较为不稳定,因此,内门的移动可能会出现延迟,造成机械手与内门发生碰撞,半导体设备宕机,导致半导体设备的工作稳定性较差,并且,由于内门和顶针组件为单独驱动,需要单独配置驱动组件,导致半导体设备的成本较高。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一,提出了一种半导体设备的工艺腔室,其能够提高半导体设备的工作效率及工作稳定性,并能够降低半导体设备的成本。
5.为实现本发明的目的而提供一种半导体设备的工艺腔室,包括腔室本体、承载部件、顶针组件、驱动组件、内门组件和同步组件,其中,所述腔室本体上开设有供晶圆传输的传输通道;所述承载部件设置在所述腔室本体内,具有用于承载所述晶圆的承载面;所述顶针组件设置在所述承载部件的内部空间中,并能够贯穿所述承载部件至所述承载面;所述驱动组件设置在所述承载部件的内部空间中,与所述顶针组件连接,用于驱动所述顶针组件上升或下降;
6.所述内门组件设置在所述腔室本体内;所述同步组件设置在所述承载部件的内部空间中,分别与所述驱动组件和所述内门组件连接,用于在所述驱动组件驱动所述顶针组件上升或下降的同时,同步带动所述内门组件下降或上升,通过所述内门组件开启或关闭所述传输通道。
7.可选的,所述同步组件包括第一连接杆和支撑杆,所述支撑杆的一端固定设置在所述承载部件的内部空间的底部,另一端与所述第一连接杆的中部连接,且所述第一连接杆可在竖向上转动,所述第一连接杆的一端与所述驱动组件可转动的连接,另一端与所述内门组件可转动的连接,所述第一连接杆的一端能够在所述驱动组件的驱动下上升或下降,且同时另一端能够下降或上升,以能够同步带动所述内门组件下降或上升。
8.可选的,所述支撑杆的另一端设置有第一连接销,所述支撑杆的另一端通过所述第一连接销与所述第一连接杆的中部可转动的连接。
9.可选的,所述驱动组件包括驱动件、传动杆和第二连接杆,其中,所述驱动件通过所述传动杆与所述顶针组件连接,以通过驱动所述传动杆上升或下降,来带动所述顶针组件上升或下降;
10.所述第二连接杆的一端通过所述传动杆与所述驱动件连接,另一端设置有第二连接销,所述第二连接杆的另一端通过所述第二连接销与所述第一连接杆的一端可转动的连接。
11.可选的,所述内门组件包括门体和门导向杆,所述门体与所述传输通道对应设置;
12.所述门导向杆呈弯折状,所述门导向杆的一端连接于所述门体的底部,另一端穿入至所述承载部件的内部空间,并设置有第三连接销,所述门导向杆的另一端通过所述第三连接销与所述第一连接杆的另一端可转动的连接。
13.可选的,所述第一连接杆的中部至所述第一连接杆的所述一端的距离为第一距离,所述第一连接杆的中部至所述第一连接杆的所述另一端的距离为第二距离,所述第一距离小于所述第二距离。
14.可选的,所述第一距离与所述第二距离的比值为1:3-1:2。
15.可选的,所述承载部件的底部开设有供所述门导向杆穿入至所述承载部件的内部空间的通孔,所述内门组件还包括密封组件,所述密封组件分别与所述通孔和所述门导向杆穿入至所述承载部件的内部空间的部分密封连接,用于密封所述通孔。
16.可选的,所述密封组件包括密封圈、密封环和可伸缩的波纹管,所述通孔为台阶孔,所述台阶孔的台阶面朝向所述承载部件的内部空间,所述台阶面上设置有供所述密封圈嵌入的环形密封槽,所述密封环套设在所述门导向杆的周围,并压紧在所述密封圈和所述台阶面上,所述密封圈用于对所述台阶面和所述密封环之间进行密封,所述波纹管套设在所述门导向杆的穿入至所述承载部件的内部空间的部分的外侧,所述波纹管的一端与所述门导向杆的穿入至所述承载部件的内部空间的部分密封连接,另一端与所述密封环密封连接,用于对可相对升降的所述门导向杆和所述密封环之间进行密封。
17.可选的,所述波纹管的与所述门导向杆密封连接的一端至所述波纹管的与密封环密封连接的另一端的距离小于所述波纹管未受外力时的原始长度,以使所述波纹管能够处于压缩状态,对所述密封环施加压紧力,将所述密封环压紧在所述密封圈和所述台阶面上。
18.本发明具有以下有益效果:
19.本发明提供的半导体设备的工艺腔室,通过设置同步组件分别与驱动组件和内门组件连接,可以借助同步组件在驱动组件驱动顶针组件上升或下降的同时,同步带动内门组件下降或上升,通过内门组件开启或关闭传输通道,这样一方面可以使得内门组件和顶针组件能够在一个驱动组件的驱动下同步移动,从而无需在内门组件与顶针组件之间设置延迟时间,进而能够提高半导体设备的工作效率,另一方面由于同步组件带动内门组件下降或上升,是依靠用于驱动顶针组件上升或下降的驱动组件的驱动力来实现的,而驱动顶针组件的驱动组件可以为电机,而电机的响应速度要优于气缸的响应速度,从而能够降低内门组件因气缸驱动延迟,而与机械手发生碰撞的情况的概率,进而能够提高半导体设备的稳定性,再一方面由于内门组件和顶针组件借助同步组件仅需通过一个驱动组件就能够
实现升降,从而能够降低半导体设备的成本。
附图说明
20.图1为本发明的发明人正在研究的一种非本发明提供的半导体设备的工艺腔室的结构示意图;
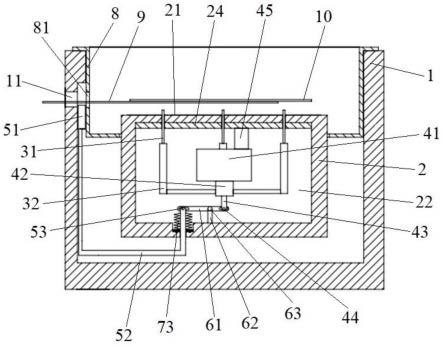
21.图2为本发明实施例提供的半导体设备的工艺腔室的内门组件和顶针组件分别位于高位和低位时的结构示意图;
22.图3为本发明实施例提供的半导体设备的工艺腔室的内门组件和顶针组件位于中位时的结构示意图;
23.图4为本发明实施例提供的半导体设备的工艺腔室的内门组件和顶针组件位于中位且机械手携带晶圆进入腔室本体时的结构示意图;
24.图5为本发明实施例提供的半导体设备的工艺腔室的内门组件和顶针组件分别位于低位和高位时的结构示意图;
25.图6为本发明实施例提供的半导体设备的工艺腔室的第一连接杆的结构示意图;
26.图7为本发明实施例提供的半导体设备的工艺腔室的驱动组件和顶针组件的结构示意图;
27.图8为本发明实施例提供的半导体设备的工艺腔室的密封组件和门导向杆配合的结构示意图;
28.附图标记说明:
29.01-腔室本体;011-传输通道;02-承载部件;021-内部空间;031-内门;032-内门导杆;033-气缸;041-电机;042-顶针;043-顶针导杆;1-腔室本体;11-传输通道;2-承载部件;21-承载面;22-内部空间;23-台阶孔;24-接口盘;31-顶针;32-针导向杆;41-驱动件;42-传动杆;43-第二连接杆;44-第二连接销;45-固定连接件;51-门体;52-门导向杆;53-第三连接销;61-第一连接杆;611-圆孔;612-第一长孔;613-第二长孔;62-支撑杆;63-第一连接销;71-密封圈;72-密封环;73-波纹管;8-内衬;81-传输孔;9-机械手;10-晶圆。
具体实施方式
30.为使本领域的技术人员更好地理解本发明的技术方案,首先结合附图来对本发明的发明人正在研究的一种非本发明提供的半导体设备的工艺腔室进行描述。
31.如图1所示,本发明的发明人正在研究的一种非本发明提供的半导体设备的工艺腔室包括腔室本体01、承载部件02、内门031、内门导杆032、气缸033、电机041、三个顶针042和三个顶针导杆043,其中,腔室本体01用于为半导体工艺提供工艺环境,腔室本体01的侧壁上设置有供晶圆传输的传输通道011,承载部件02设置在腔室本体01内,用于承载晶圆进行半导体工艺,内门031设置在腔室本体01内,并与传输通道011对应设置,气缸033设置在腔室本体01外,内门导杆032贯穿腔室本体01的底壁,一端与腔室本体01内的内门031连接,另一端与腔室本体01外的气缸033连接,电机041设置在承载部件02的内部空间021中,三个顶针042设置在承载部件02的内部空间021中,并贯穿承载部件02至承载部件02承载晶圆的承载面,三个顶针导杆043设置在承载部件02的内部空间021中,一端与电机041连接,另一端与三个顶针042一一对应连接。
32.其中,顶针042通过电机041驱动升降,内门031通过气缸033驱动升降,这是由于顶针042是用于在机械手与承载部件02的承载面之间传递晶圆,其会与晶圆接触,支撑晶圆升降,因此,顶针042的升降需要较为平稳,而电机041的驱动力相对于气缸033的驱动力较为平稳,因此,采用电机041驱动顶针042的升降,可以使得晶圆平稳的升降,而内门031是用于开关传输通道011,其仅需要能够达到开启传输通道011,和关闭传输通道011的位置即可,而气缸033的成本相对于电机041的成本较低,因此,基于成本的考虑,采用气缸033驱动内门031的升降。
33.在实际应用中,晶圆的传输包括在半导体工艺开始前,将晶圆从腔室本体01外传输至承载部件02的承载面上的放片过程,以及在半导体工艺结束后,将晶圆从承载部件02的承载面上传输至腔室本体01外的取片过程,在晶圆的传输过程中,控制系统向气缸033、电机041和机械手分别发出控制信号,并在每个控制信号之间设置延迟时间,以降低内门031、顶针042和机械手直接配合失误的情况的发生。其中,在半导体工艺开始前的放片过程中,气缸033驱动内门导杆032下降,带动内门031下降,使内门031不遮挡传输通道011,之后,机械手携带晶圆经过传输通道011进入腔室本体01内,并位于承载部件02的上方,之后,电机041驱动三个顶针导杆043上升,带动三个顶针042上升,将机械手上的晶圆顶起,使晶圆与机械手分离,之后,机械手经过传输通道011退出至腔室本体01外,之后,气缸033驱动三个内门导杆032下降,带动三个顶针042下降,将晶圆放置在承载部件02的承载面上,气缸033驱动内门导杆032上升,带动内门031上升,使内门031遮挡传输通道011,之后,可以进行半导体工艺。
34.在半导体工艺结束后的取片过程中,电机041驱动三个顶针导杆043上升,带动三个顶针042上升,将承载部件02的承载面上的晶圆顶起,之后,气缸033驱动内门导杆032下降,带动内门031下降,使内门031不再遮挡传输通道011,之后,机械手经过传输通道011进入腔室本体01内,并位于晶圆的下方,之后,电机041驱动三个顶针导杆043下降,带动三个顶针042下降,将晶圆放置在机械手上,并继续驱动三个顶针导杆043下降,带动三个顶针042继续下降,使三个顶针042与晶圆分离,之后,机械手携带晶圆经过传输通道011退出至腔室本体01外,之后,气缸033驱动内门导杆032上升,带动内门031上升,使内门031遮挡传输通道011。
35.但是,在实际应用中,本发明的发明人发现,控制系统在向气缸033、电机041和机械手发出控制信号时,控制信号有时可能会出现传输延迟的情况,并且,气缸033的响应速度相对电机041的响应速度来说较为缓慢,而这些因素可能会造成气缸033还未驱动内门031下降打开传输通道011,机械手就已经经过传输通道011,导致机械手与内门031发生碰撞的情况,造成半导体设备宕机,导致半导体设备的工作稳定性较差,因此,控制系统需要在向气缸033、电机041和机械手发出的每个控制信号之间设置延迟时间,而这又会造成晶圆传输的时间较长,导致半导体设备的工作效率较低,并且,由于顶针042和内门031分别通过电机041和气缸033单独驱动升降,造成半导体设备的成本较高。
36.为使本领域的技术人员更好地理解本发明的技术方案,下面结合附图来对本发明提供的半导体设备的工艺腔室进行详细描述。
37.如图2-图5所示,本发明实施例提供一种半导体设备的工艺腔室,包括腔室本体1、承载部件2、顶针组件、驱动组件、内门组件和同步部件,其中,腔室本体1上开设有供晶圆10
传输的传输通道11;承载部件2设置在腔室本体1内,具有用于承载晶圆10的承载面21;顶针组件设置在承载部件2的内部空间22中,并能够贯穿承载部件2至承载面21;驱动组件设置在承载部件2的内部空间22中,与顶针组件连接,用于驱动顶针组件上升或下降;内门组件设置在腔室本体1内;同步组件设置在承载部件2的内部空间22中,分别与驱动组件和内门组件连接,用于在驱动组件驱动顶针组件上升或下降的同时,同步带动内门组件下降或上升,通过内门组件开启或关闭传输通道11。
38.本发明实施例提供的半导体设备的工艺腔室,通过设置同步组件分别与驱动组件和内门组件连接,可以借助同步组件在驱动组件驱动顶针组件上升或下降的同时,同步带动内门组件下降或上升,通过内门组件开启或关闭传输通道11,这样一方面可以使得内门组件和顶针组件能够在一个驱动组件的驱动下同步移动,从而无需在内门组件与顶针组件之间设置延迟时间,进而能够提高半导体设备的工作效率,另一方面由于同步组件带动内门组件下降或上升,是依靠用于驱动顶针组件上升或下降的驱动组件的驱动力来实现的,而驱动顶针组件的驱动组件可以为电机,而电机的响应速度要优于气缸的响应速度,从而能够降低内门组件因气缸驱动延迟,而与机械手9发生碰撞的情况的概率,进而能够提高半导体设备的稳定性,再一方面由于内门组件和顶针组件借助同步组件仅需通过一个驱动组件就能够实现升降,从而能够降低半导体设备的成本。
39.并且,通过将同步组件设置在承载部件2的内部空间22中,可以避免同步组件对腔室本体1内的半导体工艺环境造成影响,避免对半导体工艺造成影响。
40.具体来说,在实际应用中,在半导体工艺开始前的放片过程中,驱动组件可以驱动顶针组件由低位上升至中位,使顶针组件的顶部由低于承载部件2的承载面21上升至高于承载部件2的承载面21,且同时同步组件可以同步带动内门组件由高位下降至中位,使内门组件由遮挡传输通道11下降至不遮挡传输通道11,以开启传输通道11(如图3所示),之后,机械手9可以携带晶圆10经过传输通道11进入腔室本体1内,并位于承载部件2的上方,且位于顶针组件的上方(如图4所示),之后,驱动组件可以继续驱动顶针组件上升至高位,使顶针组件将机械手9上的晶圆10顶起,使晶圆10与机械手9分离,且同时同步组件可以同步带动内门组件继续下降至低位,之后,机械手9可以经过传输通道11退出至腔室本体1外(如图5所示),之后,驱动组件可以驱动顶针组件下降至低位,使顶针组件的顶部低于承载部件2的承载面21,将晶圆10放置在承载部件2的承载面21上,且同时同步组件可以同步带动内门组件上升至高位,使内门组件遮挡传输通道11,以关闭传输通道11(如图2所示),之后,可以进行半导体工艺。
41.在半导体工艺结束后的取片过程中,驱动组件可以驱动顶针组件上升至高位,将承载部件2的承载面21上的晶圆10顶起,且同时同步组件可以同步带动内门组件下降至低位,使内门组件不遮挡传输通道11,以开启传输通道11(如图5所示),之后,机械手9可以经过传输通道11进入腔室本体1内,并位于顶针组件顶起的晶圆10的下方,之后,驱动组件可以驱动顶针组件下降至中位,将晶圆10放置在机械手9上,并使顶针组件与晶圆10分离,且同时同步组件可以带动内门组件上升,但使内门组件不遮挡传输通道11,以保持传输通道11的开启(如图4所示),之后,机械手9可以携带晶圆10经过传输通道11退出至腔室本体1外(如图3所示),之后,驱动组件可以继续驱动顶针组件下降至低位,使顶针组件的顶部低于承载部件2的承载面21,且同时同步组件可以同步带动内门组件上升至高位,使内门组件遮
挡传输通道11,以关闭传输通道11(如图2所示)。
42.可选的,内门组件由高位下降至中位的距离可以为10mm-14mm。
43.可选的,顶针组件由低位上升至中位的距离可以为5mm-7mm。
44.可选的,顶针组件位于低位时,顶针组件的顶部可以比承载部件2的承载面21低3mm,也就是说,顶针组件位于低位时,顶针组件的顶部低于承载部件2的承载面21,且顶针组件的顶部与承载部件2的承载面21之间的距离可以为3mm。
45.可选的,顶针组件位于中位时,顶针组件的顶部可以比承载部件2的承载面21高2mm-4mm,也就是说,顶针组件位于中位时,顶针组件的顶部高于承载部件2的承载面21,且顶针组件的顶部与承载部件2的承载面21之间的距离可以为2mm-4mm。
46.可选的,顶针组件位于中位时,机械手9进入腔室本体1内后,机械手9可以比承载部件2的承载面21高7mm-8mm,也就是说,顶针组件位于中位时,机械手9高于承载部件2的承载面21,且机械手9与承载部件2的承载面21之间的距离可以为7mm-8mm。而由于顶针组件位于中位时,顶针组件的顶部可以比承载部件2的承载面21高2mm-4mm,这样就可以使得顶针组件位于中位时,机械手9进入腔室本体1内后,机械手9能够位于顶针组件的上方,使机械手9与顶针组件不会发生干涉。
47.如图2-图5所示,在本发明一优选实施例中,同步组件可以包括第一连接杆61和支撑杆62,支撑杆62的一端固定设置在承载部件2的内部空间22的底部,另一端与第一连接杆61的中部连接,且第一连接杆61可在竖向上转动,第一连接杆61的一端与驱动组件可转动的连接,另一端与内门组件可转动的连接,第一连接杆61的一端能够在驱动组件的驱动下上升或下降,且同时另一端能够下降或上升,以能够同步带动内门组件下降或上升。
48.由于第一连接杆61的中部与支撑杆62的另一端连接,且第一连接杆61可在竖向上转动,因此,当第一连接杆61的一端上升或下降时,第一连接杆61会发生转动,第一连接杆61的另一端会下降或上升。这样当驱动组件驱动顶针组件上升时,第一连接杆61的一端也会在驱动组件的驱动下上升,且同时第一连接杆61会在竖向上转动,第一连接杆61的另一端会下降,从而能够同步带动内门组件下降,实现在驱动组件驱动顶针组件上升的同时,同步带动内门组件下降。当驱动组件驱动顶针组件下降时,第一连接杆61的一端也会在驱动组件的驱动下下降,且同时第一连接杆61会在竖向上转动,第一连接杆61的另一端会上升,从而能够同步带动内门组件上升,实现在驱动组件驱动顶针组件下降的同时,同步带动内门组件上升。
49.可选的,第一连接杆61的长度可以为70mm-80mm。
50.可选的,第一连接杆61的高度可以为5mm-6mm。
51.如图2-图6所示,在本发明一优选实施例中,支撑杆62的另一端可以设置有第一连接销63,支撑杆62的另一端通过第一连接销63与第一连接杆61的中部可转动的连接。
52.这样的结构可以实现支撑杆62的另一端与第一连接杆61的中部连接,且第一连接杆61可在竖向上转动。
53.如图2-图6所示,可选的,第一连接杆61的中部可以开设有圆孔611,第一连接销63可转动的穿设于圆孔611中。
54.这样的结构可以实现支撑杆62的另一端通过第一连接销63与第一连接杆61的中部可转动的连接。
55.可选的,圆孔611的直径可以为3mm-3.2mm。
56.可选的,第一连接销63与圆孔611可以为间隙配合。
57.可选的,第一连接销63的型号可以为m3。
58.如图2-图6所示,在本发明一优选实施例中,驱动组件可以包括驱动件41、传动杆42和第二连接杆43,其中,驱动件41通过传动杆42与顶针组件连接,以通过驱动传动杆42上升或下降,来带动顶针组件上升或下降;第二连接杆43的一端通过传动杆42与驱动件41连接,另一端设置有第二连接销44,第二连接杆43的另一端通过第二连接销44与第一连接杆61的一端可转动的连接。
59.如图2-图6所示,可选的,第一连接杆61的一端可以开设有第一长孔612,第一长孔612具有径向长度最长的长轴和最短的短轴,第一长孔612的长轴与第一连接杆61的长度方向同向,第二连接销44可转动的穿设于第一长孔612中。
60.也就是说,驱动件41用于提供驱动力,驱动件41提供的驱动力可以驱动传动杆42上升或下降,当传动杆42上升或下降时,传动杆42不仅能够带动顶针组件上升或下降,并且还能够带动第二连接杆43上升或下降,从而能够通过第二连接杆43带动第一连接杆61的一端上升或下降。通过将第二连接销44可转动的穿设于第一长孔612中,可以实现同步组件与驱动组件的连接,并且,在第二连接杆43带动第一连接杆61的一端上升或下降时,第二连接销44不仅可以在第一长孔612中转动,而且还可以在第一长孔612中沿第一长孔612的长轴移动,减少第二连接销44在转动的过程中发生卡滞的情况,从而使第二连接杆43能够顺滑的带动第一连接杆61的一端上升或下降,提高半导体设备的工作稳定性。
61.可选的,驱动件41可以为电机。
62.可选的,第一长孔612的长轴的长度可以为6mm-8mm。
63.可选的,第一长孔612的短轴的长度可以为3mm-3.2mm。
64.可选的,第二连接销44与第一长孔612可以为间隙配合。
65.可选的,第二连接销44的型号可以为m3。
66.如图2-图5及图7所示,可选的,顶针组件可以包括三个顶针31和三个针导向杆32,三个顶针31间隔设置,并均能够贯穿承载部件2至承载部件2的承载面21,用于共同支撑晶圆10,三个针导向杆32均呈弯折状,并均位于承载部件2的内部空间22中,三个针导向杆32的一端与三个顶针31一一对应的连接于三个顶针31的底部,另一端均与传动杆42连接。
67.当传动杆42上升或下降时,传动杆42会带动三个针导向杆32上升或下降,从而通过三个针导向杆32带动三个顶针31上升或下降。
68.如图2-图5所示,可选的,驱动组件可以还包括固定连接件45,固定连接件45设置在承载部件2的内部空间22中,并分别与承载部件2的顶部和驱动件41连接,从而将驱动件41吊设在承载部件2的内部空间22中。
69.如图2-图6所示,在本发明一优选实施例中,内门组件可以包括门体51和门导向杆52,门体51与传输通道11对应设置;门导向杆52可以呈弯折状,门导向杆52的一端连接于门体51的底部,另一端穿入至承载部件2的内部空间22,并设置有第三连接销53,门导向杆52的另一端通过第三连接销53与第一连接杆61的另一端可转动的连接。
70.如图2-图6所示,可选的,第一连接杆61的另一端开设有第二长孔613,第二长孔613具有径向长度最长的长轴和径向长度最短的短轴,第二长孔613的长轴与第一连接杆61
的长度方向同向,第三连接销53可转动的穿设于第二长孔613中。
71.这样当第一连接杆61的另一端上升或下降时,第一连接杆61能够带动门导向杆52上升或下降,从而能够通过门导向杆52带动门体51上升或下降,使门体51遮挡传输通道11,以关闭传输通道11,或使门体51不遮挡传输通道11,以开启传输通道11。通过将第三连接销53可转动的穿设于第二长孔613中,可以实现同步组件与内门组件的连接,并且,在第一连接杆61的另一端的上升或下降时,第三连接销53不仅可以在第二长孔613中转动,而且还可以在第二长孔613中沿第二长孔613的长轴移动,减少第三连接销53在转动的过程中发生卡滞的情况,从而使第一连接杆61能够顺滑的带动门导向杆52上升或下降,提高半导体设备的工作稳定性。
72.并且,通过使门导向杆52呈弯折状,且使门导向杆52的另一端穿入至承载部件2的内部空间22,与本发明的发明人正在研究的一种非本发明提供的半导体设备的工艺腔室中的内门导杆相比,可以使门导向杆52的直线长度减短,从而能够使门导向杆52的垂直度要求得到降低,继而能够降低由于门导向杆52的偏斜,导致门导向杆52或门体51在升降过程中与腔室本体1的内壁发生剐蹭,产生颗粒的情况,进而能够提高半导体工艺的良率。
73.如图2-图5所示,可选的,门导向杆52可以包括第一竖直段、水平段和第二竖直段,其中,第一竖直段的一端连接于门体51的底部,另一端与水平段的一端连接,第二竖直段贯穿承载部件2的底部,一端与水平段的另一端连接,另一端设置有第三连接销53。
74.可选的,第二长孔613的长轴的长度可以为6mm-8mm。
75.可选的,第二长孔613的短轴的长度可以为3mm-3.2mm。
76.可选的,第三连接销53与第二长孔613可以为间隙配合。
77.可选的,第三连接销53的型号可以为m3。
78.在本发明一优选实施例中,第一连接杆61的中部至第一连接杆61的一端的距离为第一距离,第一连接杆61的中部至第一连接杆61的另一端的距离为第二距离,第一距离可以小于第二距离。
79.也就是说,圆孔611的圆心至第一连接杆61的与驱动组件连接的一端的距离为第一距离,圆孔611的圆心至第一连接杆61的与内门组件连接的另一端的距离为第二距离,第一距离可以小于第二距离,这样的设计可以在第一连接杆61转动时,使第一连接杆61的一端的升降的距离小于另一端的升降的距离,从而可以使门体51升降的距离大于顶针31升降的距离。
80.在本发明一优选实施例中,第一距离与第二距离的比值可以为1:3-1:2。
81.也就是说,圆孔611的圆心至第一连接杆61的与驱动组件连接的一端的距离,与圆孔611的圆心至第一连接杆61的与内门组件连接的另一端的距离的比值可以为1:3-1:2,这样的设计可以在第一连接杆61转动时,使第一连接杆61的一端的升降的距离,与另一端的升降的距离的比值为1:3-1:2,从而可以使门体51升降的距离与顶针31升降的距离为2:1-3:1。
82.如图2-图5及图8所示,在本发明一优选实施例中,承载部件2的底部可以开设有供门导向杆52穿入至承载部件2的内部空间22的通孔,内门组件可以还包括密封组件,密封组件分别与通孔和门导向杆52穿入至承载部件2的内部空间22的部分密封连接,用于密封通孔。
83.这样的设计是由于例如刻蚀机(etch)等半导体真空设备在进行半导体工艺时,需要对腔室本体1内进行抽真空,通过密封组件密封通孔,可以使承载部件2的内部空间22与腔室本体1内分隔,从而便于对腔室本体1内进行抽真空。
84.如图2-图5及图8所示,在本发明一优选实施例中,密封组件可以包括密封圈71、密封环72和可伸缩的波纹管73,通孔可以为台阶孔23,台阶孔23的台阶面朝向承载部件2的内部空间22,台阶面上设置有供密封圈71嵌入的环形密封槽,密封环72套设在门导向杆52的周围,并压紧在密封圈71和台阶面上,密封圈71用于对台阶面和密封环72之间进行密封,波纹管73套设在门导向杆52的穿入至承载部件2的内部空间22的部分的外侧,波纹管73的一端与门导向杆52的穿入至承载部件2的内部空间22的部分密封连接,另一端与密封环72密封连接,用于对可相对升降的门导向杆52和密封环72之间进行密封。
85.借助波纹管73可以对门导向杆52和台阶孔23之间进行密封,并且,借助密封圈71可以对密封环72和台阶面之间进行密封,从而对台阶孔23进行密封,并且,由于波纹管73能够伸缩,因此,波纹管73能够在门导向杆52升降时,保持对门导向杆52和台阶孔23之间进行密封,并且,由于密封环72是压紧在密封圈71和台阶面上,因此,可以便于对门导向杆52和承载部件2进行拆装。
86.可选的,台阶孔23可以包括第一孔段和第二孔段,其中,第一孔段位于第二孔段的下方,第一孔段的直径小于第二孔段的直径,第一孔段的顶面可以作为台阶面。
87.可选的,门导向杆52的直径可以为4.9mm-5mm。
88.可选的,第一孔段的直径可以为5mm-5.5mm。
89.可选的,第二孔段的直径可以为15mm-15.2mm。
90.可选的,台阶孔23的深度可以为20mm-25mm。
91.可选的,密封环72可以分别与第二孔段和门导向杆52为间隙配合,以能够借助密封环72对门导向杆52进行限位,使门导向杆52保持竖直。
92.可选的,密封环72中的孔的直径可以为5mm-5.1mm。
93.可选的,密封环72的外径可以为14.9mm-15mm。
94.可选的,密封环72的材质可以为铝。
95.在本发明一优选实施例中,波纹管73的与门导向杆52密封连接的一端至波纹管73的与密封环72密封连接的另一端的距离,可以小于波纹管73未受外力时的原始长度,以使波纹管73能够处于压缩状态,对密封环72施加压紧力,将密封环72压紧在密封圈71和台阶面上。
96.这样的设计可以使波纹管73总是处于压缩状态,以借助波纹管73的回弹力施加在密封环72上,对密封环72施加压紧力,将密封环72压紧在密封圈71和台阶面上。
97.可选的,波纹管73的与门导向杆52密封连接的一端至台阶面的距离可以为45mm-50mm。
98.可选的,密封环72的厚度可以为4mm-6mm。
99.可选的,波纹管73未受外力时的原始长度可以为55mm-60mm。
100.这样可以使波纹管73的与门导向杆52密封连接的一端至波纹管73的与密封环72密封连接的另一端的距离,小于波纹管73未受外力时的原始长度。
101.可选的,波纹管73的极限压缩长度可以为10mm-15mm,这样可以使得波纹管73的有
效行程为40mm-50mm。
102.如图2-图5所示,可选的,工艺腔室可以还包括内衬8,内衬8呈环状,环绕设置于腔室本体1的内壁的内侧,一端与腔室本体1的顶部连接,另一端环绕承载部件2设置,用于对腔室本体1的内壁进行遮挡,内衬8上还开设有供晶圆10传输的传输孔81,传输孔81与传输通道11对应设置,以使机械手9和晶圆10能够通过。
103.如图2-图5所示,可选的,承载部件2的内部空间22中设置有接口盘24,接口盘24上开设有供三个顶针31穿过的通孔。
104.在例如刻蚀机(etch)等半导体设备中,承载部件2中设置有下电极,下电极用于对产生下射频,吸引半导体工艺中腔室本体1内的等离子体轰击承载部件2上的晶圆10,下电极的线路可以穿设于接口盘24中。
105.综上所述,本发明实施例提供的半导体设备的工艺腔室,能够提高半导体设备的工作效率及工作稳定性,并能够降低半导体设备的成本。
106.可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变形和改进,这些变形和改进也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1