一种线塔攀爬搬运机器人的制作方法
1.本发明涉及机器人技术领域,具体涉及一种线塔攀爬搬运机器人。
背景技术:
2.采用高压和超高压架空电力线路进行电力输送是远距离输送电力的主要方式,高压和超高压输电线路是电力系统的动脉,高压输电线路的安全运行直接关系到供电的稳定性和可靠性。线塔是支撑高压和超高压线路远离地面的主要装置,线塔是采用角钢通过螺栓连接而成的桁架结构,一般由四根主角钢组成正方形断面或矩形断面,主角钢之间通过角钢材料制成的水平材或斜材连接,斜材与主角钢采用螺栓直接连接或外加节点板连接。而输电线长期显露在野外,分布地点多,并且绝大部分远离城镇,所处地形复杂,自然环境恶劣,因受到持续的机械张力、风吹日晒、材料老化等的影响,经常会出现断股、磨损、腐蚀、螺丝松动等问题。因自然原因或人为破坏造成的微小损坏或缺陷,都可能扩大,最终导致严重的事故,因此对电力输电设备的日常巡检与维护是有效保障输电设备安全可靠输送的基础工作。
3.目前国内高压输电线路的检修、维护基本上都是采用人工攀爬线塔的方式,维修设备则由人力搬运至线塔顶端,由于高压线塔大多设置在荒郊野外,维修器材又十分笨重,这不仅消耗检修人员的大量体力,降低工作效率,也极不安全。随着高压和特高压输电线路的持续建设,线路检修维护的工作量越来越大,电力部门迫切需要一种能够代替人工完成危险且繁重高空搬运作业的攀爬机器人,以减轻工作人员的劳动强度,并提高检修维护工作的效率。
技术实现要素:
4.为解决现有技术的不足,本发明的目的在于提供一种线塔攀爬搬运机器人,能够将维修器材通过线塔搬运至高压线上,代替人工完成危险且繁重的高空搬运作业。
5.本发明采取的技术方案为:一种线塔攀爬搬运机器人,其特征在于:主体内部设有锂电池和控制单元,主体上端设有两个连接耳下端设有两个转轴,主体外侧还设有左立板和右立板,左立板的内部设有两个卡止口,主体左右两侧各安装有十个可自由转动的支撑轮,一号履带为橡胶材质并安装于左侧十个支撑轮的外围,二号履带的结构与材质与一号履带相同并安装于右侧支撑轮的外围,一号履带和二号履带均可自由转动;两个摆动板前端分别与主体上端的一个连接耳转动连接,两个摆动板的后端分别通过一个电缸与主体下端的一个转轴连接,从而电缸可通过伸缩控制对应摆动板的摆动,两个摆动板前端均安装有一个电机,每个电机均通过一个蜗轮蜗杆减速器与一个齿轮连接;每个攀爬臂均对应安装于一个摆动板上侧并构成移动副,每个攀爬臂上端均设有一个挂钩,每个攀爬臂外侧均设有一个齿条,两个齿条与对应的齿轮啮合构成齿轮齿条传动结构,从而两个电机可实现对应攀爬臂的前后移动和定位;卷扬筒中间位置设有用于缠绕钢丝绳的回转梯形槽,卷扬筒的左端设有四个轴,卷扬筒的右端设有刹车凹槽,卷扬筒安装于左立板和右立板之间并
可自由转动,钢丝绳上端固定于线塔顶端,钢丝绳下端设有吊坠;刹车机构安装于卷扬筒右端的刹车凹槽中,两个刹车板右端与右立板转动连接,两个刹车板的左端通过两个连杆分别与摆动杆的上下两侧连接,摆动杆的右端与曲柄外端紧固连接,曲柄内端与主体之间设有电推杆;防坠落机构安装于卷扬筒左端,两个棘爪的一端与卷扬筒转动连接,每个棘爪的另一端与卷扬筒之间还设有一个拉力弹簧;当卷扬筒快速逆时针转动时,两个棘爪在离心力的作用下向外张开,并卡入左立板内的两个卡止口中,从而锁止卷扬筒的转动;托板固定安装于主体外侧,托板下端设有两个可为待搬运维修器材提供支撑的支撑板,托板上还设置有四个吊环,绳索可将维修器材绑缚后固定于四个吊环上,使运输过程更加安全;托板上端还设置有一个摄像头。
6.作为优选,主体左右两侧的支撑轮均排列为折线形,并且最上端的支撑轮位置高于主体的外侧面。
7.作为优选,每个支撑轮中间位置均设置有环形的v形槽,两个履带内侧均布设有多个防脱凸起,防脱凸起可与支撑轮上的v形槽配合,从而使一号履带不会从左侧的支撑轮上脱离。
8.作为优选,两个摆动板上侧均设有一个t形导轨,两个攀爬臂内侧均设有一个t形导槽,t形导轨和t形导槽配合构成移动副。
9.作为优选,摄像头可进行前后摆动和左右转动,可使机器人具有较好的视野。
10.作为优选,吊坠的质量不小于25kg。
11.作为优选,两个刹车板均为弧形结构,并且外侧弧面上均设有耐磨片。
12.作为优选,钢丝绳在卷扬筒上的有效缠绕圈数不少于四圈。
13.本发明的有益效果:
14.(1)机器人可将高压线维修设备通过线塔搬运至高压线上,能够代替人工完成险且繁重的高空搬运作业,能够极大地减轻工作人员的劳动强度,也能有效提高高压线的维修维护效率。
15.(2)本发明中设置有两个攀爬臂,两个攀爬臂可交替勾住线塔上的斜材角铁或水平材角铁,实现机器人的上升或下降,并且两个攀爬臂上端的两个挂钩均位于机器人的纵向中间位置,有利于保持机器人在攀爬过程中的平衡。
16.(3)机器人悬空停止时,由两个刹车板构成的卷扬筒刹车机构,可锁止卷扬筒的转动,并依靠钢丝绳与卷扬筒之间的摩擦力防止机器人意外下坠,提高机器人的安全性。
17.(4)机器人在攀爬时,由两个棘爪构成的防坠落装置,可利用离心力作用卡死卷扬筒的转动,并依据钢丝绳与卷扬筒之间的摩擦力停止机器人的下坠动作,从而实现机器人的防坠落功能。
18.(5)机器人上设置有两个橡胶材质并可自由转动的履带,在地面上转运机器人时,两个履带可用于支撑机器人,减轻工作人员的推拉力;在攀爬线塔时,两个履带可与线塔接触,避免主体与线塔产生摩擦或剐蹭,也能起到绝缘的作用。
附图说明
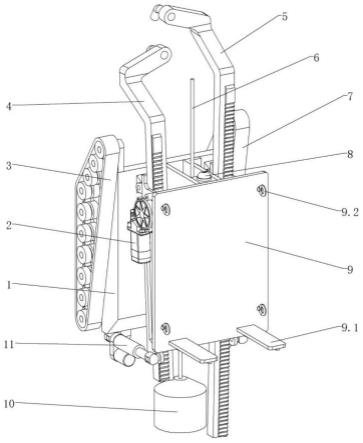
19.图1为本发明的整体结构示意图。
20.图2为本发明去除托板后的整体结构示意图。
21.图3为本发明攀爬线塔时的状态示意图。
22.图4为本发明中主体部分的放大结构示意图。
23.图5为卷扬筒右端的局部剖面结构示意图。
24.图6为卷扬筒左端的局部剖面结构示意图。
25.图7为卷扬筒位置的局部放大示意图。
26.图8为卷扬筒的结构示意图。
27.附图标号:1主体、1.1一号连接耳、1.2二号连接耳、1.3左立板、1.4右立板、1.5固定轴、1.6三号连接耳、1.7一号转轴、1.8二号转轴、1.9卡止口、2一号电机、3一号履带、3.1防脱凸起、4一号攀爬臂、4.1一号齿条、4.2一号挂钩、5二号攀爬臂、5.1二号齿条、5.2二号挂钩、6钢丝绳、7二号履带、8摄像头、9托板、9.1支撑板、9.2吊环、10吊坠、11一号电缸、12一号摆动板、13支撑轮、14一号齿轮、15二号齿轮、16卷扬筒、16.1一号轴、16.2二号轴、16.3三号轴、16.4四号轴、17二号电机、18电推杆、19二号摆动板、20二号电缸、21一号刹车板、22一号连杆、23摆动杆、24二号连杆、25二号刹车板、26一号棘爪、27一号弹簧、28二号棘爪、29二号弹簧、30曲柄。
具体实施方式
28.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
29.如图1~8所示,一种线塔攀爬搬运机器人,包括主体1、一号电机2、一号履带3、一号攀爬臂4、二号攀爬臂5、钢丝绳6、二号履带7、摄像头8、托板9、吊坠10、一号电缸11、一号摆动板12、支撑轮13、一号齿轮14、二号齿轮15、卷扬筒16、二号电机17、电推杆18、二号摆动板19、二号电缸20、一号刹车板21、一号连杆22、摆动杆23、二号连杆24、二号刹车板25、一号棘爪26、一号弹簧27、二号棘爪28、二号弹簧29、曲柄30,其中主体1内部设置有锂电池和控制单元,主体1外侧上端设置有左右对称的一号连接耳1.1和二号连接耳1.2,主体1外侧还设有左立板1.3和右立板1.4,并且左立板1.3位于右立板1.4的左侧,左立板1.3和右立板1.4上横向设有两个同轴心的圆孔,左立板1.3的内部周向均布设有两个卡止口1.9,右立板1.4的左侧横向设有一个固定轴1.5,右立板1.4的下侧设有三号连接耳1.6,主体1下端左右两侧分别设有一号转轴1.7和二号转轴1.8,主体1的左侧安装有十个支撑轮13,十个支撑轮13依次排列为折线形,并且最上端的支撑轮13位置高于主体1的外侧面,并且每个支撑轮13中间位置均设置有环形的v形槽,一号履带3为橡胶材质并安装于左侧十个支撑轮13的外围,一号履带3内侧均布设有多个防脱凸起3.1,防脱凸起3.1可与支撑轮13上的v形槽配合,从而使一号履带3不会从左侧的支撑轮13上脱离,每个支撑轮13均可自由转动,从而一号履带3可进行自由转动;主体1的右侧安装有十个支撑轮,十个支撑轮依次排列为折线形并与左侧的支撑轮13一一对应,右侧支撑轮的结构与左侧的支撑轮13结构相同,二号履带7的结构与材质与一号履带3相同,二号履带7安装于右侧支撑轮的外围,右侧每个支撑轮均可自由转动,从而二号履带7可进行自由转动。
30.如图2所示,所述的一号摆动板12前端下侧与一号连接耳1.1转动连接,从而一号摆动板12可前后摆动,一号电缸11下端与一号转轴1.7转动连接,一号电缸11上端与一号摆动板12后端转动连接,从而一号电缸11伸长可使一号摆动板12逆时针摆动,一号电缸11收
缩可使一号摆动板12顺时针摆动;一号摆动板12上侧纵向设有一个t形导轨,所述的一号攀爬臂4内侧纵向设有t形导槽,该t形导槽与一号摆动板12上侧的t形导轨配合安装并构成移动副,从而一号攀爬臂4可自由滑动;一号攀爬臂4外侧纵向设有一号齿条4.1;一号电机2固定安装于一号摆动板12前端,一号电机2通过蜗轮蜗杆减速器与一号齿轮14同轴紧固连接,一号齿轮14与一号齿条4.1配合安装并构成齿轮齿条传动结构,从而一号电机2可实现一号攀爬臂4的上下移动和定位;一号攀爬臂4的上端内侧设有一号挂钩4.2,一号挂钩4.2可用于钩挂线塔上的斜材角铁或水平材角铁。
31.如图2所示,所述的二号摆动板19与一号摆动板12成左右对称的结构,二号摆动板19前端下侧与二号连接耳1.2转动连接,从而二号摆动板19可前后摆动,二号电缸20下端与二号转轴1.8转动连接,二号电缸20上端与二号摆动板19后端转动连接,从而二号电缸20伸长可使二号摆动板19逆时针摆动,二号电缸20收缩可使二号摆动板19顺时针摆动;二号摆动板19上侧纵向设有一个t形导轨,所述的二号攀爬臂5内侧纵向设有t形导槽,该t形导槽与二号摆动板19上侧的t形导轨配合安装并构成移动副,从而二号攀爬臂5可自由滑动;二号攀爬臂5外侧纵向设有二号齿条5.1;二号电机17固定安装于二号摆动板19前端,二号电机17通过蜗轮蜗杆减速器与二号齿轮15同轴紧固连接,二号齿轮15与二号齿条5.1配合安装并构成齿轮齿条传动结构,从而二号电机17可实现二号攀爬臂5的上下移动和定位;二号攀爬臂5的上端内侧设有二号挂钩5.2,二号挂钩5.2可用于钩挂线塔上的斜材角铁或水平材角铁。
32.如图2、图4、图6、图8所示,所述的卷扬筒16中间位置设有回转的梯形槽,梯形槽用于缠绕钢丝绳,卷扬筒16的左端设有四个轴,分别为一号轴16.1、二号轴16.2、三号轴16.3、四号轴16.4,其中一号轴16.1和三号轴16.3成中心对称,二号轴16.2和三号轴16.3成中心对称,卷扬筒16的右端设有刹车凹槽,卷扬筒16安装于左立板1.3和右立板1.4之间并可自由转动;所述一号棘爪26的左端与一号轴16.1转动连接,所述的一号弹簧27为拉力弹簧,其上端与二号轴16.2连接,一号弹簧27下端与一号棘爪26右端连接,从而在一号弹簧27的拉力作用下,一号棘爪26始终有逆时针转动的趋势;所述二号棘爪28的结构与一号棘爪26相同,二号棘爪28右端与三号轴16.3转动连接,所述二号弹簧29的结构与一号弹簧27相同,二号弹簧29的上端与二号棘爪28左端连接,二号弹簧29的下端与四号轴16.4转动连接,从而在二号弹簧29的拉力作用下,二号棘爪28始终有逆时针转动的趋势;当卷扬筒16快速逆时针转动时,一号棘爪26和二号棘爪28在离心力的作用下向外张开,使两个棘爪的外端插入两个卡止口1.9中,从而锁定卷扬筒16的转动。
33.如图2、图4、图5、图7所示,所述的一号刹车板21和二号刹车板25安装于卷扬筒16右端的刹车凹槽中,并且一号刹车板21为弧形结构并且其右端与固定轴1.5转动连接,一号刹车板21的外侧弧面上设有耐磨片,一号刹车板21的左端与一号连杆22的上端转动连接,二号刹车板25为弧形结构并且其右端与固定轴1.5转动连接,二号刹车板25的外侧弧面上设有耐磨片,二号刹车板25左端与二号连杆24下端转动连接;所述的摆动杆23穿过右立板1.4并可自由转动,摆动杆23的左端上侧与一号连杆22下端转动连接,摆动杆23的左端下侧与二号连杆24上端转动连接,从而摆动杆23逆时针转动可使一号刹车板21和二号刹车板25同时向外张开并压紧卷扬筒16,从而锁止卷扬筒16的转动;顺时针转动摆动杆23可使一号刹车板21和二号刹车板25同时向内合拢,使一号刹车板21和二号刹车板25解除对卷扬筒16
的锁止;所述摆动杆23的右端与曲柄30外端紧固连接,曲柄30内端与电推杆18上端转动连接,电推杆18下端与三号连接耳1.6转动连接,从而电推杆18伸长可使摆动杆23逆时针转动并锁止卷扬筒16的转动,电推杆18收缩可使摆动杆23顺时针转动并解除对卷扬筒16的锁止。
34.如图2所示,所述钢丝绳6的上端与线塔上端紧固连接,钢丝绳6的下端在卷扬筒16上依次缠绕四圈后与吊坠10连接,吊坠10的质量不小于25kg;所述的托板9通过螺钉固定安装于主体1外侧,托板9外侧为平板结构,平板结构的下端设有两个支撑板9.1,两个支撑板9.1可为待搬运的维修器材提供支撑,托板9上还设置有四个吊环9.2,绳索可将维修器材绑缚后固定于四个吊环9.2上,使运输过程更加安全;所述的摄像头8安装于托板9上端,摄像头8可进行前后摆动和左右转动,可使搬运机器人具有较好的视野。
35.实施例一:机器人搬运维修器材上升的过程:首先使一号履带3和二号履带7接触地面并为机器人提供支撑;之后将维修器材放置于托板9上,并通过绳索将维修器材固定;之后使一号电机2、二号电机17转动,使一号攀爬臂4、二号攀爬臂5向前移动,再使一号电缸11、二号电缸20收缩,使一号攀爬臂4、二号攀爬臂5前端均向上摆动;之后将机器人转运至线塔下方,并使一号电缸11伸长,使一号挂钩4.2向下摆动,将一号挂钩4.2钩挂于线塔下端的斜材角铁或水平材角铁上,并将钢丝绳6上端固定于线塔顶端,再将吊坠10连接于钢丝绳6下端并悬空垂吊,从而使钢丝绳6拉紧;之后一号电机2转动,并使机器人顺着一号攀爬臂4向上移动,直至移动到一号攀爬臂4的顶端;在此过程中,机器人通过一号履带3和二号履带7压于线塔上,并且随着机器人向上移动,一号履带3和二号履带7发生随动转动,并且随着机器人向上移动,卷扬筒16在钢丝绳6的驱动下顺时针转动;之后二号电缸20伸长,使二号挂钩5.2向靠近线塔方向摆动,并使二号挂钩5.2挂到线塔更上方的斜材角铁或水平材角铁上;之后二号电机17转动,使机器人顺着二号攀爬臂5继续向上移动,直至移动至二号攀爬臂5的顶端;在此过程中一号电缸11收缩,使一号挂钩4.2向外摆动并脱离线塔上的斜材角铁或水平材角铁,并使一号电机2转动使一号攀爬臂4向上伸长;在机器人攀爬线塔的过程中,一号攀爬臂4和二号攀爬臂5交替勾住线塔上的斜材角铁或水平材角铁,实现机器人在线塔上的上升。
36.机器人从线塔上向下移动时,一号攀爬臂4和二号攀爬臂5交替勾住线塔上的斜材角铁或水平材角铁,逐步从线塔上端移动至下端。
37.实施例二:当机器人在线塔上停止时,电推杆18伸长,使摆动杆23逆时针转动,并使一号刹车板21和二号刹车板25同时向外张开并压紧卷扬筒16,从而锁止卷扬筒16的转动,由于吊坠10在重力作用下可拉紧钢丝绳6,从而钢丝绳6与卷扬筒16之间可产生摩擦力,故而卷扬筒16锁之后,钢丝绳6与卷扬筒16之间的摩擦力可防止机器人意外下坠,使机器人的安全性得到提高。
38.实施例三:当机器人在攀爬过程中一号挂钩4.2或二号挂钩5.2意外脱落后,机器人在重力作用下会迅速向下坠落,此时卷扬筒16在钢丝绳6的驱动作用下快速逆时针转动,则一号棘爪26和二号棘爪28在离心力的作用下向外张开,两个棘爪的外端插入两个卡止口1.9中,从而锁定卷扬筒16的转动,进而根据钢丝绳6与卷扬筒16之间的摩擦力停止机器人的下坠动作,从而实现机器人的防坠落功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1