大型多自由度混联船体喷涂机器人
1.本发明涉及喷涂机器人技术领域,尤其是涉及一种大型多自由度混联船体喷涂机器人。
背景技术:
2.船体的喷涂是船舶建造、维修过程中的重要环节,喷涂的涂层可使船体钢结构免受高盐高湿恶劣环境的影响,是使船舶达到甚至超过设计使用寿命的关键之一。然而,传统的喷涂作业多是依靠人工完成,不仅效率低、质量差,而且喷涂材料本身的毒性还可能损害作业人员的身体健康。因此,以机器人代替人工进行喷涂是大势所趋。
3.在船体喷涂领域,一方面由于船体巨大的体积而要求喷涂机构拥有较大的工作空间,另一方面由于船体表面为曲面而要求喷枪转动较为灵活,从而始终能够与被喷涂表面保持固定夹角进行喷涂。
4.现有技术中的多自由度大型船体喷涂机器人在使用过程中,由于采用纯串联构型,驱动电机安装在机器人底座到末端的各个关节处,机器人运动过程中底部关节的动力学负载较大,整体结构的变形量也较大,不利于喷涂精度的提升,同时为了提供足够大的负载,电机需要具有更大的额定功率,更大的额定功率又意味着成本的上升。
技术实现要素:
5.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种大型多自由度混联船体喷涂机器人,喷涂精度高、喷枪运动灵活、工作空间大,可以实现高效的喷涂作业。
6.根据本发明实施例的大型多自由度混联船体喷涂机器人,包括二自由度移动车体、七自由度串联机械臂和五自由度混联喷涂机构;其中,所述七自由度串联机械臂为大型串联机构且具有悬臂梁结构,所述七自由度串联机械臂的一端设置在所述二自由度移动车体上;所述五自由度混联喷涂机构的一端设置在所述七自由度串联机械臂的另一端上;
7.工作时,所述二自由度移动车体用于使所述大型多自由度混联船体喷涂机器人到达指定作业位置;所述七自由度串联机械臂用于根据待喷涂表面所处的方位,使所述五自由度混联喷涂机构到达所述待喷涂表面附近;所述五自由度混联喷涂机构用于对所述待喷涂表面进行精准喷涂。
8.根据本发明实施例的大型多自由度混联船体喷涂机器人,通过将七自由度串联机械臂和五自由度混联喷涂机构结合,七自由度串联机械臂为大型串联机构且具有悬臂梁结构,刚度较低,挠度较大;但是,七自由度串联机械臂在喷涂作业中用于增大工作空间,喷涂精度不通过七自由度串联机械臂保证;七自由度串联机械臂在移动至大致喷涂位置后保持不动,通过末端刚度和精度均更高的五自由度混联喷涂机构进行一定区域内的喷涂作业。因此,本发明实施例的大型多自由度混联船体喷涂机器人,既充分利用了七自由度串联机械臂工作空间大的特性,又利用了五自由度混联喷涂机构刚度高和精度高的优点,避免了
七自由度串联机械臂低刚度带来的喷涂精度不足的问题。另外,五自由度混联喷涂机构还可以使涂料喷出方向与待喷涂表面呈指定角度,从而使喷涂质量更高。综上,本发明的喷涂机器人通过采用粗略控制和精细控制相结合的方式,使得自身既具有工作空间大,又具有末端平动转动灵活、喷涂精度和效率高的优点。
9.在一些实施例中,所述二自由度移动车体包括转向轮、驱动轮和底盘;所述转向轮可水平转动地与所述底盘连接,所述驱动轮不可水平转动地与所述底盘连接;通过控制所述转向轮的水平转动和所述驱动轮的移动来实现所述大型多自由度混联船体喷涂机器人在地面二维空间上的自由移动。
10.在一些实施例中,所述七自由度串联机械臂包括底部转台、大臂、第一小臂、第二小臂、滑轨和龙门架;所述底部转台可水平转动地设置在所述二自由度移动车体上;所述大臂可伸缩,所述大臂的后端与所述底部转台可转动连接,所述第一小臂后端与所述大臂的前端可转动连接;所述第二小臂的后端与所述第一小臂的前端可转动连接;所述大臂与所述底部转台之间的转动轴线、所述第一小臂与所述大臂之间的转动轴线,所述第二小臂与所述第一小臂之间的转动轴线均为左右延伸;所述滑轨与所述第二小臂固连;所述龙门架可左右移动地设置在所述滑轨上;所述五自由度混联喷涂机构可上下移动地设置在所述龙门架上;
11.通过控制所述底部转台与所述二自由度移动车体之间的转动、所述大臂与所述底部转台之间的转动、所述大臂的伸缩运动、所述第一小臂与所述大臂之间的转动、所述第二小臂与所述第一小臂之间的转动、所述龙门架相对于所述滑轨的左右移动和所述五自由度混联喷涂机构相对于所述龙门架的上下移动,来粗略地控制所述五自由度混联喷涂机构在空间中的位置、俯仰姿态以及偏航姿态。
12.在一些实施例中,所述底部转台与所述二自由度移动车体之间的转动、所述大臂与所述底部转台之间的转动、所述大臂的伸缩运动、所述第一小臂与所述大臂之间的转动、所述第二小臂与所述第一小臂之间的转动、所述龙门架相对于所述滑轨的左右移动以及所述五自由度混联喷涂机构相对于所述龙门架的上下移动分别通过各自的驱动器驱动。
13.在一些实施例中,所述五自由度混联喷涂机构具有左右平动自由度、前后平动自由度、上下平动自由度、上下摆动自由度和左右摆动自由度。
14.在一些实施例中,所述五自由度混联喷涂机构包括喷涂底座、喷涂臂、第一平行四边形机构、第二双平行四边形机构、第三平行四边形机构和喷枪;所述喷涂底座可水平转动地设置在所述七自由度串联机械臂的前端;所述喷涂臂的下端、所述第一平行四边形机构的下前端和所述第二双平行四边形机构的下前端同轴且可独立转动地设置在所述喷涂底座上,所述第三平行四边形机构的后端可转动地设置在所述喷涂臂的上端前侧,所述第三平行四边形机构与所述第一平行四边形机构相连,所述第三平行四边形机构的前端和所述第二双平行四边形机构的上前端相连;所述喷涂臂和所述第一平行四边形机构共同驱动所述喷枪前后平动和上下平动;所述第二双平行四边形机构驱动所述喷枪上下摆动;所述第三平行四边形机构驱动所述喷枪左右摆动。
15.在一些实施例中,所述第一平行四边形机构包括第一连杆、第二连杆和第三连杆,所述第一连杆的前端与所述喷涂臂的下端同轴且可独立转动地设置在所述喷涂底座上,所述第一连杆的后端与所述第二连杆的下端之间、所述第二连杆的上端与所述第三连杆的后
端之间,所述第三连杆的中部与所述喷涂臂的上端之间为可转动连接,所述第一连杆、所述第二连杆、所述第三连杆和所述喷涂臂共同构成所述第一平行四边形机构;
16.通过共同控制所述喷涂臂和所述第一连杆的转动来实现所述喷枪的前后平动和上下平动。
17.在一些实施例中,所述第二双平行四边形机构包括第四连杆、第五连杆、连接机构、第六连杆和第七连杆;所述第四连杆的前端与所述喷涂臂的下端同轴且可独立转动地设置在所述喷涂底座上,所述第四连杆的后端与所述第五连杆的下端之间、所述第五连杆的上端与所述连接机构的第一端之间、所述连接机构的第二端与所述喷涂臂的上端之间、所述第六连杆的后端与所述连接机构的第三端之间、所述第六连杆的前端与所述第七连杆的下端之间,所述第七连杆的上端与所述第三连杆的前端之间为可转动连接,其中,所述第四连杆、所述第五连杆、所述连接机构和所述喷涂臂构成所述第二双平行四边形机构中的一平行四边形机构,所述连接机构、所述第六连杆、所述第七连杆和所述第三连杆在位于所述喷涂臂的前侧一段构成所述第二双平行四边形机构中的另一平行四边形机构;
18.通过控制所述第四连杆的转动来实现所述喷枪的上下摆动。
19.在一些实施例中,所述连接机构为三角形机构,所述三角形机构的三个角部分别为所述第一端、所述第二端和所述第三端。
20.在一些实施例中,所述第三平行四边形机构包括第八连杆、第九连杆、第一锥齿轮和第二锥齿轮,所述第八连杆的下端与所述喷涂臂的上端之间、所述第八连杆的上端与所述第九连杆的后端之间、所述第九连杆的前端与所述第一锥齿轮的左侧端面偏心处之间、所述第一锥齿轮的右侧端面中心处与所述第三连杆的前端之间均为转动连接,所述第八连杆、所述第九连杆、所述第一锥齿轮和所述第三连杆在位于所述喷涂臂的前侧一段构成所述第三平行四边形机构;所述第二锥齿轮可转动地安装在基座上,所述基座与所述第七连杆固连,所述第一锥齿轮与所述第二锥齿轮啮合;所述喷枪与所述第二锥齿轮相连;
21.通过控制所述第八连杆的转动来实现所述喷枪的左右摆动。
22.在一些实施例中,所述喷涂臂的转动、所述第一连杆的转动、所述第四连杆的转动以及所述第八连杆的转动分别通过各自的电机驱动。
23.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
24.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
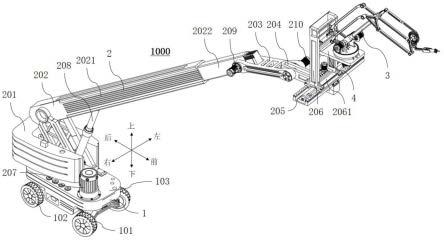
25.图1为本发明实施例的大型多自由度混联船体喷涂机器人的整体结构示意图。
26.图2为本发明实施例中二自由度移动车体和七自由度串联机械臂的结构示意图。
27.图3为本发明实施例中滑轨和龙门架的结构示意图。
28.图4为本发明实施例中五自由度混联喷涂机构的结构示意图。
29.附图标记:
30.大型多自由度混联船体喷涂机器人1000
31.二自由度移动车体1
32.转向轮101 驱动轮102 底盘103
33.七自由度串联机械臂2
34.底部转台201 大臂202 固定段2021 伸缩段2022 第一小臂203
35.第二小臂204 滑轨205 龙门架206 龙门架底座2061
36.第二转动副驱动207 第三转动副驱动208 第四转动副驱动209
37.第五转动副驱动210 第二滚珠丝杠导轨副211 加强筋212
38.五自由度混联喷涂机构3
39.喷涂底座301 喷涂臂302 第一平行四边形机构303 第一连杆3031
40.第二连杆3032 第三连杆3033 第二双平行四边形机构304
41.第四连杆3041 第五连杆3042 连接机构3043 第一端30431
42.第二端30432 第三端30433 第六连杆3044 第七连杆3045
43.第三平行四边形机构305 第八连杆3051 第九连杆3052
44.第一锥齿轮3053 第二锥齿轮3054 喷枪306 喷头连接件3061
45.喷头3062
46.连接板4 基座5
具体实施方式
47.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
48.下面结合图1至图4来描述本发明的大型多自由度混联船体喷涂机器人1000。
49.如图1至图4所示,根据本发明实施例的大型多自由度混联船体喷涂机器人1000,包括二自由度移动车体1、七自由度串联机械臂2和五自由度混联喷涂机构3;其中,七自由度串联机械臂2为大型串联机构且具有悬臂梁结构,七自由度串联机械臂2的一端设置在二自由度移动车体1上;五自由度混联喷涂机构3的一端设置在七自由度串联机械臂2的另一端上;工作时,二自由度移动车体1用于使大型多自由度混联船体喷涂机器人1000到达指定作业位置;七自由度串联机械臂2用于根据待喷涂表面所处的方位,使五自由度混联喷涂机构3到达待喷涂表面附近;五自由度混联喷涂机构3用于对待喷涂表面进行精准喷涂。
50.具体而言,七自由度串联机械臂2为大型串联机构,这里是指,七自由度串联机械臂2的尺寸较大,且由上下依次连接的多个机构构成,机构具有各自的驱动源,例如电机、液压伸缩缸等,七自由度串联机械臂2可以实现七个运动行为,以使七自由度串联机械臂2的另一端可以实现大范围的运动,七自由度串联机械臂2具有悬臂梁结构,这里是指七自由度串联机械臂2具有悬臂梁结构特征,即一端固定在二自由度移动车体1上,另一端为自由端,五自由度混联喷涂机构3的一端设置在七自由度串联机械臂2的另一端上,从而七自由度串联机械臂2的另一端可以带动五自由度混联喷涂机构3实现大范围运动,可以较为粗略地控制五自由度混联喷涂机构3在工作空间中的位置、俯仰姿态以及偏航姿态。
51.七自由度串联机械臂2的一端设置在二自由度移动车体1上。其中,二自由度移动车体1可以实现在水平面内任意方向的平动,以带动七自由度串联机械臂2达到水平面内的不同位置。
52.五自由度混联喷涂机构3的一端设置在七自由度串联机械臂2的另一端上。其中,五自由度是指五自由度混联喷涂机构3的末端可以实现上下平动、左右平动、前后平动三个平动自由度以及左右摆动和上下摆动两个转动自由度,从而五自由度混联喷涂机构3可以在一定工作空间内进行喷涂作业以及可以对进行喷涂作业的末端的姿态进行调整。混联是指五自由度混联喷涂机构3既包括串联机构又包括并联机构,既具有串联机构的优点,运动范围大,又具有并联机构的优点,灵活度高、刚度高、末端定位精度高,从而可以精细地进行喷涂作业,喷涂精度高。
53.工作时,二自由度移动车体1用于使大型多自由度混联船体喷涂机器人1000到达指定作业位置;七自由度串联机械臂2用于根据待喷涂表面所处的方位,使五自由度混联喷涂机构3到达待喷涂表面附近;然后七自由度串联机械臂2保持不动,五自由度混联喷涂机构3用于对待喷涂表面进行精准喷涂。由此,本发明的喷涂机器人1000既可以充分利用七自由度串联机械臂2运动范围大的优势,又可以充分利用五自由度混联喷涂机构3灵活性高、刚度高、末端定位精度高的优势,因此本发明的喷涂机器人1000在进行喷涂作业时,可以保证涂料喷出方向始终与待喷涂表面呈指定角度,且喷涂精度和效率更高。
54.根据本发明实施例的大型多自由度混联船体喷涂机器人1000,通过将七自由度串联机械臂2和五自由度混联喷涂机构3结合,七自由度串联机械臂2为大型串联机构且具有悬臂梁结构,刚度较低,挠度较大;但是,七自由度串联机械臂2在喷涂作业中用于增大工作空间,喷涂精度不通过七自由度串联机械臂2保证;七自由度串联机械臂2在移动至大致喷涂位置后保持不动,通过末端刚度和精度均更高的五自由度混联喷涂机构3进行一定区域内的喷涂作业。因此,本发明实施例的大型多自由度混联船体喷涂机器人1000,既充分利用了七自由度串联机械臂2工作空间大的特性,又利用了五自由度混联喷涂机构3刚度高和精度高的优点,避免了七自由度串联机械臂2低刚度带来的喷涂精度不足的问题。另外,五自由度混联喷涂机构3还可以使涂料喷出方向与待喷涂表面呈指定角度,从而使喷涂质量更高。综上,本发明的喷涂机器人1000通过采用粗略控制和精细控制相结合的方式,使得自身既具有工作空间大,又具有末端平动转动灵活、喷涂精度和效率高的优点。
55.在一些实施例中,二自由度移动车体1包括转向轮101、驱动轮102和底盘103;转向轮101可水平转动地与底盘103连接,驱动轮102不可水平转动地与底盘103连接;通过控制转向轮101的水平转动和驱动轮102的移动来实现大型多自由度混联船体喷涂机器人1000在地面二维空间上的自由移动。可以理解的是,驱动轮102用于驱动二自由度移动车体1沿转向轮101的朝向移动,转向轮101用于控制二自由度移动车体1的移动方向。其中,转向轮101可以为从动轮也可以为主动轮。
56.具体地,如图1和图2所示,转向轮101通过转向轮轴安装在底盘103上,转向轮轴与底盘103之间通过第一转动副可转动地连接,第一转动副的中心轴线沿上下方向延伸,底盘103上安装有转向电机,转向电机用于驱动转向轮101沿第一转动副的中心轴线转动。驱动轮102通过驱动轮轴安装在底盘103上,驱动轮轴的中心轴线沿左右方向延伸,底盘103上设置有驱动电机,驱动电机用于驱动驱动轮102绕着驱动轮轴的中心轴线转动,从而可以通过控制转向电机和驱动电机,来实现二自由度移动车体1的转向和前进,使二自由度移动车体1具有在水平面内的两个平动自由度。
57.在一些实施例中,如图1和图2所示,七自由度串联机械臂2包括底部转台201、大臂
202、第一小臂203、第二小臂204、滑轨205和龙门架206;底部转台201可水平转动地设置在二自由度移动车体1上,底部转台201转动为七自由度串联机械臂2的第一个自由度;大臂202可伸缩,大臂202伸缩运动为七自由度串联机械臂2的第二个自由度;大臂202的后端与底部转台201可转动连接,大臂202相对于底部转台201转动为七自由度串联机械臂2的第三个自由度;第一小臂203后端与大臂202的前端可转动连接,第一小臂203相对于大臂202转动为七自由度串联机械臂2的第四个自由度;第二小臂204的后端与第一小臂203的前端可转动连接,第二小臂204相对于第一小臂203转动为七自由度串联机械臂2的第五个自由度;大臂202与底部转台201之间的转动轴线、第一小臂203与大臂202之间的转动轴线,第二小臂204与第一小臂203之间的转动轴线均为左右延伸;滑轨205与第二小臂204固连;龙门架206可左右移动地设置在滑轨205上,龙门架206相对于滑轨205的移动为七自由度串联机械臂2的第六个自由度;五自由度混联喷涂机构3可上下移动地设置在龙门架206上,五自由度混联喷涂机构3相对于龙门架206上下移动为七自由度串联机械臂2的第七个自由度;综上,七自由度串联机械臂2具有七个自由度。
58.通过控制底部转台201与二自由度移动车体1之间的转动、大臂202与底部转台201之间的转动、大臂202的伸缩运动、第一小臂203与大臂202之间的转动、第二小臂204与第一小臂203之间的转动,龙门架206相对于滑轨205的左右移动和五自由度混联喷涂机构3相对于龙门架206的上下移动,来粗略地控制五自由度混联喷涂机构3在空间中的位置、俯仰姿态和偏航姿态,使得五自由度混联喷涂机构3尽可能地接近待喷涂表面,这样,当七自由度串联机械臂2保持不动时,可以保证五自由度混联喷涂机构3可喷涂的面积更大,控制五自由度混联喷涂机构3俯仰和偏航姿态,有利于保证五自由度混联喷涂机构3在喷涂时涂料喷出方向始终保持不变。
59.在一些实施例中,如图1至图3所示,底部转台201与二自由度移动车体1之间的转动、大臂202与底部转台201之间的转动、大臂202的伸缩运动、第一小臂203与大臂202之间的转动、第二小臂204与第一小臂203之间的转动、龙门架206相对于滑轨205的左右移动以及五自由度混联喷涂机构3相对于龙门架206的上下移动分别通过各自的驱动器驱动,从而七自由度串联机械臂2可以带动五自由度混联喷涂机构3进行大范围运动。
60.具体地,如图1和图2所示,底部转台201与底盘103通过第二转动副可转动地连接,第二转动副的中心轴线沿上下方向延伸,底盘103上安装有第二转动副驱动207,底部转台201可在第二转动副驱动207的控制下绕第二转动副的中心轴线转动。大臂202与底部转台201通过第三转动副可转动地连接,第三转动副的中心轴线沿左右方向延伸且与大臂202的延伸方向垂直,大臂202可在第三转动副驱动208的控制下绕第三转轴转动,可选的,第三转动副驱动208为液压伸缩杆,液压伸缩杆的一端安装在大臂202上,另一端安装在底部转台201上。大臂202包括固定段2021和伸缩段2022,伸缩段2022可沿固定段2021伸缩,伸缩段2022沿着固定段2021伸缩通过液压驱动。
61.第一小臂203前端与大臂202的伸缩段2022通过第四转动副可转动地连接,第四转动副的轴线方向与第三转动副的轴线的方向平行,大臂202的伸缩段2022上安装有第四转动副驱动209,第一小臂203可在第四转动副驱动209的控制下绕第四转动副的轴线方向转动。第二小臂204后端与第一小臂203前端通过第五转动副可转动地连接,第五转动副的中心轴线方向与第四转动副的中心轴线方向平行,第一小臂203上安装有第五转动副驱动
210,第二小臂204可在第五转动副驱动210的控制下绕第五转动副的中心轴线转动。
62.滑轨205下端与第二小臂204上端固连,龙门架206通过龙门架底座2061与滑轨205连接,龙门架底座2061顶端与龙门架206底端固连,滑轨205为第一滚珠丝杠导轨副,滑轨205可以带动龙门架206沿滑轨205延伸方向移动,滑轨205延伸方向与第五转动副的中心轴线平行。
63.五自由度混联喷涂机构3安装在连接板4上,连接板4可上下移动地安装在龙门架206上。例如,龙门架206两侧的立柱上设置有第二滚珠丝杠导轨副211,第二滚珠丝杠导轨副211沿上下方向延伸,两个第二滚珠丝杠导轨副211采用两个电机驱动,驱动两个第二滚珠丝杠导轨副211的两个电机均安装在龙门架底座2061上且通过第一传动机构与两个第二滚珠丝杠导轨副211连接,两个第二滚珠丝杠导轨副211的驱动速度相同,连接板4的后端固定安装在两个第二滚珠丝杠导轨副211上,从而第二滚珠丝杠导轨副211可以带动连接板4上下运动。
64.在一些实施例中,如图3所示,七自由度串联机械臂2包括多个加强筋212。多个加强筋212连接在第二小臂204和滑轨205之间,从而有效提高第二小臂204和滑轨205的整体结构强度。
65.在一些实施例中,五自由度混联喷涂机构3具有左右平动自由度、前后平动自由度、上下平动自由度、上下摆动自由度和左右摆动自由度,也就是说,当七自由度串联机械臂2将五自由度混联喷涂机构3送至喷涂表面附近后,七自由度串联机械臂2保持不动,五自由度混联喷涂机构3自身可以在一定区域内进行喷涂作业,还可以使涂料喷出方向与船体表面之间的角度保持固定,可以应对各种船体复杂的表面。
66.在一些实施例中,如图4所示,五自由度混联喷涂机构3包括喷涂底座301、喷涂臂302、第一平行四边形机构303、第二双平行四边形机构304、第三平行四边形机构305和喷枪306;喷涂底座301可水平转动地设置在七自由度串联机械臂2的前端,例如喷涂底座301可水平转动地设置在连接板4上,从而使五自由度混联喷涂机构3可以左右转动;喷涂臂302的下端、第一平行四边形机构303的下前端和第二双平行四边形机构304的下前端同轴且可独立转动地设置在喷涂底座301上,第三平行四边形机构305的后端可转动地设置在喷涂臂302的上端前侧,第三平行四边形机构305与第一平行四边形机构303相连,第三平行四边形机构305的前端和第二双平行四边形机构304的上前端相连;由此,第一平行四边形机构303、第二双平行四边形机构304、第三平行四边形机构305采用并联的方式相互连接,喷涂底座301与第一平行四边形机构303、第二双平行四边形机构304、第三平行四边形机构305串联,从而使五自由度混联喷涂机构3的结构更加紧凑,刚度高,灵活性好。
67.喷涂臂302和第一平行四边形机构303共同驱动喷枪306前后平动和上下平动;第二双平行四边形机构304驱动喷枪306上下摆动,第三平行四边形机构305驱动喷枪306左右摆动,喷涂底座301和第三平行四边形机构305协作共同驱动喷枪306时,可以精细地控制喷枪306的左右移动和左右摆动,由此,可以通过控制喷涂底座301、喷涂臂302、第一平行四边形机构303、第二双平行四边形机构304以及第三平行四边形机构305的运动,来精细地控制喷枪306进行三个平动自由度和两个转动自由度的五自由度运动。另外,由于第一平行四边形机构303、第二双平行四边形机构304和第三平行四边形机构305的刚度均较高,因此可承载的喷枪306质量可以较大,有利于高效的喷涂作业。
68.优选的,第一平行四边形机构303、第二双平行四边形机构304、第三平行四边形机构305均采用减重设计,从而可以使得五自由度混联喷涂机构3在运动时更加灵活。具体的实施例包括,采用轻质复合材料或者采用铝合金等来制造第一平行四边形机构303、第二双平行四边形机构304和第三平行四边形机构305,或者采用镂空设计或表面设置有凹槽的杆件来制造第一平行四边形机构303、第二双平行四边形机构304和第三平行四边形机构305。
69.在一些实施例中,如图4所示,第一平行四边形机构303包括第一连杆3031、第二连杆3032和第三连杆3033,第一连杆3031的前端与喷涂臂302的下端同轴且可独立转动地设置在喷涂底座301上,第一连杆3031的后端与第二连杆3032的下端之间、第二连杆3032的上端与第三连杆3033的后端之间,第三连杆3033的中部与喷涂臂302的上端之间为可转动连接,第一连杆3031、第二连杆3032、第三连杆3033和喷涂臂302共同构成第一平行四边形机构303;需要说明的是,喷枪306与第三连杆3033前端连接。
70.当第一连杆3031前端绕着第一连杆3031前端的转动轴线转动时,第一连杆3031会带动第二连杆3032发生转动,第二连杆3032会带动第三连杆3033绕着第三连杆3033的中部的转动轴线转动,由于喷枪306与第三连杆3033前端连接,因此第三连杆3033会带动喷枪306平动,但喷枪306自身的姿态不会发生改变;当喷涂臂302绕着喷涂臂302下端的转动轴线转动时,喷涂臂302会带动第一平行四边形机构303、第二双平行四边形机构304以及第三平行四边形机构305一起运动,由于喷枪306与第三连杆3033前端连接,即与第一平行四边形机构303连接,因此喷涂臂302转动时,会带动喷枪306平动,但喷枪306自身的姿态不会发生改变;由此可以通过共同控制喷涂臂302和第一连杆3031的转动来实现喷枪306的前后平动和上下平动。本发明的喷涂机器人1000通过设置第一平行四边形机构303,使得驱动喷枪306的前后平动和上下平动的驱动可以设置在喷涂底座301上,减小了五自由度混联喷涂机构3末端的质量和惯量,从而可以使得喷枪306的控制更加灵活。
71.需要说明的是,第一连杆3031的前端的转动轴线、第一连杆3031的后端与第二连杆3032的下端之间的转动轴线、第二连杆3032的上端与第三连杆3033的后端之间的转动轴线,第三连杆3033的中部与喷涂臂302的上端之间的转动轴线均相互平行,且沿左右方向延伸。
72.优选的,第一连杆3031的延伸方向和第三连杆3033的延伸方向平行,第二连杆3032的延伸方向和喷涂臂302的延伸方向平行,从而可以使得第一连杆3031与第三连杆3033之间的传动角度比为1:1,有利于设计和控制。
73.在一些实施例中,如图4所示,第二双平行四边形机构304包括第四连杆3041、第五连杆3042、连接机构3043、第六连杆3044和第七连杆3045;第四连杆3041的前端与喷涂臂302的下端同轴且可独立转动地设置在喷涂底座301上,第四连杆3041的后端与第五连杆3042的下端之间、第五连杆3042的上端与连接机构3043的第一端30431之间、连接机构3043的第二端30432与喷涂臂302的上端之间、第六连杆3044的后端与连接机构3043的第三端30433之间、第六连杆3044的前端与第七连杆3045的下端之间,第七连杆3045的上端与第三连杆3033的前端之间为可转动连接,其中,第四连杆3041、第五连杆3042、连接机构3043和喷涂臂302构成第二双平行四边形机构304中的一平行四边形机构,连接机构3043、第六连杆3044、第七连杆3045和第三连杆3033在位于喷涂臂302的前侧一段构成第二双平行四边形机构304中的另一平行四边形机构;喷枪306安装在第七连杆3045上,通过控制第四连杆
3041的转动来实现喷枪306的上下摆动。
74.其中,第四连杆3041的前端的转动轴线、第四连杆3041的后端与第五连杆3042的下端之间的转动轴线、第五连杆3042的上端与连接机构3043的第一端30431之间的转动轴线、连接机构3043的第二端30432与喷涂臂302的上端之间的转动轴线、第六连杆3044的后端与连接机构3043的第三端30433之间的转动轴线、第六连杆3044的前端与第七连杆3045的下端之间的转动轴线、第七连杆3045的上端与第三连杆3033的前端之间的转动轴线相互平行,且沿左右方向延伸。
75.当第四连杆3041绕第四连杆3041前端的转动轴线转动时,第四连杆3041的后端会带动第五连杆3042发生转动,第五连杆3042会带动连接机构3043绕第二端30432的转动轴线发生转动,连接机构3043的第三端30433会带动第六连杆3044发生转动,第六连杆3044会带动第七连杆3045发生转动,从而可以带动喷枪306上下摆动。通过设置第二双平行四边形机构304,使得驱动喷枪306上下摆动的驱动可以设置在喷涂底座301上,减小了五自由度混联喷涂机构3末端的质量和惯量,从而可以使得喷枪306的控制更加灵活。
76.优选的,第四连杆3041的延伸方向和第一端30431和第二端30432之间的连线平行、第五连杆3042的延伸方向和喷涂臂302的延伸方向平行,第三连杆3033的延伸方向和第六连杆3044的延伸方向平行,第二端30432和第三端30433之间的连线与第七连杆3045的延伸方向平行,从而可以使得第四连杆3041与喷枪306之间的传动角度比为1:1,有利于设计和控制。
77.在一些实施例中,如图4所示,连接机构3043为三角形机构,三角形机构的三个角部分别为第一端30431、第二端30432和第三端30433,可以理解的是,三角形机构起到连接两个平行四边形机构、传递转动的作用,也可以使得第二双平行四边形机构304的结构更加稳定,支撑强度更好。当然,连接机构3043也可以采用其他形状,例如梯形、∧形等。
78.在一些实施例中,如图4所示,第三平行四边形机构305包括第八连杆3051、第九连杆3052、第一锥齿轮3053和第二锥齿轮3054,第八连杆3051的下端与喷涂臂302的上端之间、第八连杆3051的上端与第九连杆3052的后端之间、第九连杆3052的前端与第一锥齿轮3053的左侧端面偏心处之间、第一锥齿轮3053的右侧端面中心处与第三连杆3033的前端之间均为转动连接,第八连杆3051、第九连杆3052、第一锥齿轮3053和第三连杆3033在位于喷涂臂302的前侧一段构成第三平行四边形机构305;第二锥齿轮3054可转动地安装在基座5上,基座5与第七连杆3045固连,第一锥齿轮3053与第二锥齿轮3054啮合;喷枪306与第二锥齿轮3054相连。这样,当第八连杆3051的一端转动时,可以带动第九连杆3052转动,第九连杆3052转动会通过第一锥齿轮3053的左侧端面偏心处的转动副带动第一锥齿轮3053绕自身的中心轴线转动,此时,又由于第一锥齿轮3053和第二锥齿轮3054啮合,因此可以带动第二锥齿轮3054转动,从而第二锥齿轮3054可以带动喷枪306左右摆动,由此,可以通过控制第八连杆3051的转动来实现喷枪306的左右摆动,增大了五自由度混联喷涂机构3喷涂复杂曲面的灵活性。通过设置第三平行四边形机构305,避免了将控制喷枪306左右摆动的驱动直接设置在喷枪306处,减小了五自由度混联喷涂机构3末端的质量,从而既能减小五自由度混联喷涂机构3的喷涂底座301处驱动的负载,又能提升五自由度混联喷涂机构3的动力学性能。另外,可以通过同时控制喷涂底座301的水平转动和第三平行四边形机构305带动喷枪306的左右摆动来实现喷枪306的左右平动自由度。
79.优选的,第八连杆3051和第九连杆3052之间的转动轴线与第八连杆3051和喷涂臂302之间的转动轴线之间的垂线段、第一锥齿轮3053左侧端面偏心处的转动轴线与第一锥齿轮3053的右侧端面中心处的转动轴线之间的垂线段相互平行,第九连杆3052的延伸方向和第三连杆3033的延伸方向平行,从而可以使得第八连杆3051与第一锥齿轮3053之间的传动角度比为1:1,有利于设计和控制。
80.这里需要说明一下,当第一平行四边形机构303带动第三连杆3033发生转动时,虽然第七连杆3045会跟随运动,但可以通过主动控制第四连杆3041不转动,使连接机构3043不会发生转动,由于第七连杆3045的延伸方向会始终与第二端30432和第三端30433之间的连线保持平行,从而可以使得喷枪306的姿态不会发生变化。当第二双平行四边形机构304带动第七连杆3045转动时,由于第二锥齿轮3054会跟随发生运动,因此可以主动控制第八连杆3051对应地也发生转动,以对第二锥齿轮3054的运动进行补偿。
81.具体地,如图4所示,喷枪306包括喷头3062和喷头连接件3061,喷头连接件3061与第二锥齿轮3054固定连接,喷头连接件3061长边的方向与第二锥齿轮3054的径向相同;喷头3062与喷头连接件3061固定连接,喷头3062的涂料喷出方向与喷头连接件3061长边的方向相同。
82.在一些实施例中,如图4所示,喷涂臂302的转动、第一连杆3031的转动、第四连杆3041的转动以及第八连杆3051的转动分别通过各自的电机驱动。由于喷涂臂302的下端可独立转动地设置在喷涂底座301上,第一连杆3031的前端可独立转动地设置在喷涂底座301上,第四连杆3041的前端可独立转动地设置在喷涂底座301上,因此,可以将驱动喷涂臂302转动的电机、驱动第一连杆3031转动的电机、驱动第四连杆3041转动的电机均固定在喷涂底座301上,相比于采用纯串联的构型将驱动电机安装在各个关节处,导致机构在运动过程中底部关节的动力学负载较大的情况,本发明实施例中的五自由度混联喷涂机构3将大部分电机均设置在喷涂底座301上,极大地降低了五自由度混联喷涂机构3中电机的负载、自身结构的重量以及自身结构的变形量,从而使得五自由度混联喷涂机构3的喷涂精度更高,控制也更加灵活高效,且可以采用低功率的电机,成本更低。可以理解的是,当电机由于相互干涉的原因不能直接驱动喷涂臂302、第一连杆3031、第四连杆3041转动时,可以在电机和喷涂臂302、第一连杆3031、第四连杆3041之间设置第二传动机构,例如齿轮机构和皮带轮机构等等。
83.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
84.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1