基于视觉的机器人自动选矿设备及选矿方法与流程
基于视觉的机器人自动选矿设备及选矿方法
1.技术领域:本发明涉及一种基于视觉的机器人自动选矿设备及选矿方法。
2.
背景技术:
传统的选矿设备是色选机,色选机将颗粒直径在0.1-12
㎝
的矿石进行粒径分段色选,色选机的单位时间处理量大;多台色选机设备可以对矿石进行不同品级的筛选;1.当矿石的粒径超过12
㎝
时,现有市场上的色选机不能进行筛选;单台色选机不能对矿石做多个品级的筛选。
3.
技术实现要素:
本发明的目的是提供一种基于视觉的机器人自动选矿设备及选矿方法,对大粒径的矿石进行筛选,且可筛选出多个品级,不同品级的矿石筛选,可以一步到位。
4.上述的目的通过以下的技术方案实现:一种基于视觉的机器人自动选矿设备,包括:输送带,所述的输送带上方安装有相机安装架、六轴关节机器人,在所述的输送带来料方向安装有2台3d相机,所述的六轴关节机器人安装在底座上,所述的六轴关节机器人上安装有取料爪。
5.所述的基于视觉的机器人自动选矿设备,其中1台所述的3d相机安装在矿石流水线右上方,另1台所述的3d相机安装在矿石流水线左下方,2台所述的3d相机对称安装。
6.所述的基于视觉的机器人自动选矿设备,所述的六轴关节机器人两侧放置有料盒,所述的料盒内分隔有一组品质框。
7.所述的基于视觉的机器人自动选矿设备,所述的取料爪包括连接夹具,所述的连接夹具圆形端固定在六轴关节机器人上,所述的连接夹具方形端与固定板连接;所述的固定板上安装有直线导轨、丝杆支撑座、丝杆固定座,所述的丝杆支撑座和所述的丝杆固定座上固定有滚珠丝杆;所述的固定板上固定有抓料爪一,所述的抓料爪一与抓料爪二对应,所述的抓料爪二固定在驱动板上,所述的驱动板与步进电机连接,所述的驱动板通过连接板与滚珠丝杆螺帽连接;所述的步进电机固定在电机安装板上,与滚珠丝杆通过联轴器相连接,所述的电机安装板固定在固定板上。
8.一种利用上述的基于视觉的机器人自动选矿设备的选矿方法,该方法包括如下步骤:(1)待测矿石在输送带上输送,相机安装架安装在输送带上方;(2)在来料方向的右上前方和左后下方分别装有1台3d相机,对待测矿石的上前后左右五个面进行拍照,获取待测矿石的信息;(3)待测矿石的信息到控制系统,六轴关节机器人固定在底座上,取料爪调整夹爪距离到合适宽度,由六轴关节机器人带动取料爪,抓取待测矿石到另一个面朝上的相机;(4)相机对待测矿石底面拍照,获取待测矿石信息,反馈到控制系统,系统根据待测矿石的信息判断品质,由取料爪将之放到料盒中对应的一个品质框。
9.本发明的有益效果:本发明的3d相机对矿石成色、品级的区分;六轴关节机器人运行速度和3d相机拍照和处理结果,反馈结果的时间,决定了处理量,当需要达到一定单位的处理量时,处理速度越快,所需关节机器人、3d相机、夹爪的套数越少,成本越低。
10.本发明的结构简单,适用性强,可以在多种环境下运行;通用性强,不同种类的矿石筛选都可以使用,如石英石、煤等;不同品级的矿石筛选,可以一步到位。
11.附图说明:附图1是本发明的结构示意图。
12.附图2是附图1中取料爪的结构示意图。
13.具体实施方式:为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
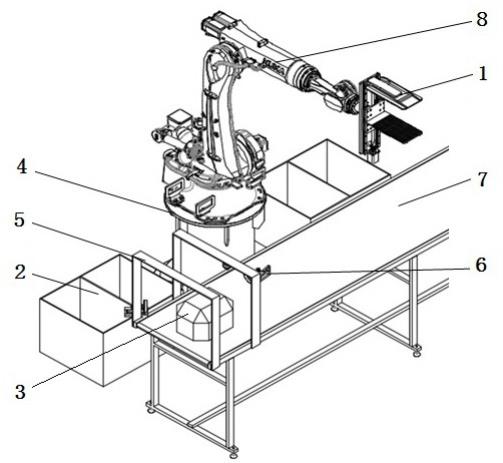
14.实施例1:本发明提供了一种基于视觉的机器人自动选矿设备,如附图1所示,包括:取料爪1、料盒2、待测矿石3、底座4、相机安装架5、相机6、输送带7、六轴关节机器人8。
15.所述的输送带上方安装有相机安装架5、六轴关节机器人8,在所述的输送带7来料方向安装有2台3d相机6,所述的六轴关节机器人8安装在底座上,所述的六轴关节机器人8上安装有取料爪1。
16.其中1台所述的3d相机6安装在矿石流水线右上方,另1台所述的3d相机6安装在矿石流水线左下方,2台所述的3d相机6对称安装,对来料矿石除底面外的五个面进行拍照,将信息反馈到控制中心;六轴关节机器人8抓取矿石后移动到附近相机对矿石底面进行拍照,然后控制中心根据矿石的六个面判断矿石的品级,将之放到对应的矿石品级收集盒;如附图2所示,所述的取料爪1包括连接夹具1-11,连接夹具1-11的圆形端固定在六轴关节机器人上,连接夹具1-11的方形端与固定板1-5连接;直线导轨1-1固定在固定板1-5上;丝杆支撑座1-3、丝杆固定座1-4固定在固定板1-5上;滚珠丝杆1-2固定在丝杆支撑座1-3和丝杆固定座1-4上;驱动板1-10通过连接板1-9与滚珠丝杆螺帽1-2连接;抓料爪一1-6固定在固定板1-5上;抓料爪二1-7固定在1-10驱动板上,与抓料爪一1-6对应,通过步进电机1-12驱动来调节两个爪之间的距离;电机安装板1-8固定在固定板1-5上;步进电机1-12固定在电机安装板1-8上,与滚珠丝杆1-2通过联轴器1-13相连接;六轴关节机器人控制夹具对矿石进行抓取,抓料爪一1-6、抓料爪二1-7之间的宽度,由伺服电机控制,根据要抓取的矿石宽度调整夹爪的合适距离,对矿石进行抓取;抓料爪一1-6、抓料爪二1-7之间宽度的调节范围,不同的范围意味着能筛选不同粒径的矿石,如宽度在20
㎝‑
100
㎝
的夹爪可以筛选粒径在20
㎝‑
100
㎝
的矿石;实施例2:根据实施例1所述的基于视觉的机器人自动选矿设备,其选矿方法包括:(1)待测矿石3在输送带7上输送,相机安装架5安装在输送带7上方;
(2)在来料方向的右上前方和左后下方分别装有1台3d相机6,对待测矿石3的上前后左右五个面进行拍照,获取待测矿石3的信息;(3)待测矿石3的信息到控制系统,六轴关节机器人8固定在底座4上,取料爪1调整夹爪距离到合适宽度,由六轴关节机器人8带动取料爪1,抓取待测矿石3到另一个面朝上的相机6;(4)相机6对待测矿石3底面拍照,获取待测矿石3信息,反馈到控制系统,系统根据待测矿石3的信息判断品质,由取料爪1将之放到料盒2中对应的一个品质框。
17.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
技术特征:
1.一种基于视觉的机器人自动选矿设备,其特征在于,包括:输送带(7),所述的输送带上方安装有相机安装架(5)、六轴关节机器人(8),在所述的输送带(7)来料方向安装有2台3d相机(6),所述的六轴关节机器人(8)安装在底座上,所述的六轴关节机器人(8)上安装有取料爪(1)。2.根据权利要求1所述的基于视觉的机器人自动选矿设备,其特征在于,其中1台所述的3d相机(6)安装在矿石流水线右上方,另1台所述的3d相机(6)安装在矿石流水线左下方,2台所述的3d相机(6)对称安装。3.根据权利要求2所述的基于视觉的机器人自动选矿设备,其特征在于,所述的六轴关节机器人(8)两侧放置有料盒(2),所述的料盒内分隔有一组品质框。4.根据权利要求3所述的基于视觉的机器人自动选矿设备,其特征在于,所述的取料爪(1)包括连接夹具(1-11),所述的连接夹具(1-11)圆形端固定在六轴关节机器人(8)上,所述的连接夹具(1-11)方形端与固定板(1-5)连接;所述的固定板(1-5)上安装有直线导轨(1-1)、丝杆支撑座(1-3)、丝杆固定座(1-4),所述的丝杆支撑座(1-3)和所述的丝杆固定座(1-4)上固定有滚珠丝杆(1-2);所述的固定板(1-5)上固定有抓料爪一(1-6),所述的抓料爪一(1-6)与抓料爪二(7)对应,所述的抓料爪二(7)固定在驱动板(1-10)上,所述的驱动板(1-10)与步进电机(1-12)连接,所述的驱动板(1-10)通过连接板(1-9)与滚珠丝杆螺帽(1-2)连接;所述的步进电机(1-12)固定在电机安装板(1-8)上,与滚珠丝杆(1-2)通过联轴器(1-13)相连接,所述的电机安装板(1-8)固定在固定板(1-5)上。5.一种利用权利要求1-4之一所述的基于视觉的机器人自动选矿设备的选矿方法,其特征在于,该方法包括如下步骤:(1)待测矿石(3)在输送带(7)上输送,相机安装架(5)安装在输送带(7)上方;(2)在来料方向的右上前方和左后下方分别装有1台3d相机(6),对待测矿石(3)的上前后左右五个面进行拍照,获取待测矿石(3)的信息;(3)待测矿石(3)的信息到控制系统,六轴关节机器人(8)固定在底座(4)上,取料爪(1)调整夹爪距离到合适宽度,由六轴关节机器人(8)带动取料爪(1),抓取待测矿石3到另一个面朝上的相机(6);(4)相机(6)对待测矿石(3)底面拍照,获取待测矿石(3)信息,反馈到控制系统,系统根据待测矿石(3)的信息判断品质,由取料爪(1)将之放到料盒(2)中对应的一个品质框。
技术总结
基于视觉的机器人自动选矿设备。本发明包括:输送带,所述的输送带上方安装有相机安装架、六轴关节机器人,在所述的输送带来料方向安装有2台3D相机,所述的六轴关节机器人安装在底座上,所述的六轴关节机器人上安装有取料爪;其中1台所述的3D相机安装在矿石流水线右上方,另1台所述的3D相机安装在矿石流水线左下方,2台所述的3D相机对称安装;所述的六轴关节机器人两侧放置有料盒,所述的料盒内分隔有一组品质框。本发明是对大粒径的矿石进行筛选,且可筛选出多个品级,不同品级的矿石筛选,可以一步到位。可以一步到位。可以一步到位。
技术研发人员:华文孝 陈致新 庄云恩 黄骏 孙志祥 陈戟铭
受保护的技术使用者:湖南严格智能技术有限公司
技术研发日:2022.07.08
技术公布日:2022/9/20
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1