一种检测机器人外壳滑动式快拆结构的制作方法
1.本发明涉及智能机器人技术领域,更具体地说,是涉及一种检测机器人外壳滑动式快拆结构。
背景技术:
2.在智能机器人行业中,多传感器信息融合、导航与定位、路径规划、智能控制等等关键技术的要求越来越高,同时也促进智能机器人的响应速度、维护便捷、外观等等需求也在不断上升。
3.智能机器人壳体不仅承载着支撑整体结构,安装和容纳各电子和机械零部件,防水防尘等功能,在智能化领域也要求其外观精美,并体现智能机器人的设计主题,在必要场合,也要求壳体可实现快速拆卸安装。
4.智能机器人壳体材质主要有冲压钣金、折弯钣金、高密度塑料、玻璃钢、碳纤维等等,其中塑料材质壳体主要通过卡扣和旋钮等方式进行快速拆卸,钣金等金属外壳主要通过螺栓固定,而在以玻璃钢和碳纤维为壳体的智能机器人设备中,玻璃钢和碳纤维壳体都需要经过预埋内村钣金与结构件螺栓连接固定,这种固定方式在频繁拆卸过程中效率低;在结构紧凑的场合,操作不方便;在没有操作空间时还需要在玻璃钢或碳纤维壳体上开孔,才能使壳体固定,使得壳体不美观。
技术实现要素:
5.本发明的目的在于提供一种检测机器人外壳滑动式快拆结构,以解决背景技术中提到的问题。
6.为实现上述目的,本发明采用的技术方案是:提供一种检测机器人外壳滑动式快拆结构,包括机翼支架,所述机翼支架上面右侧安装右导向滑槽,所述机翼支架上面左侧安装左导向滑槽,所述右导向滑槽和所述左导向滑槽滑动连接滑动钣金,所述滑动钣金上面固定安装在机翼底面。
7.如上所述的一种检测机器人外壳滑动式快拆结构,所述滑动钣金下面一侧固定安装限位板,所述限位板两端穿过快拆杆。
8.如上所述的一种检测机器人外壳滑动式快拆结构,所述机翼支架中间固定安装加强方管,所述机翼支架两侧固定安装螺母固定块,所述螺母固定块中间固定安装锁紧螺母。
9.如上所述的一种检测机器人外壳滑动式快拆结构,所述右导向滑槽和所述左导向滑槽内侧固定连接弹簧圆头固定柱,所述弹簧圆头固定柱下面贴合滑动钣金。
10.如上所述的一种检测机器人外壳滑动式快拆结构,所述机翼采用玻璃钢或碳纤维制作。
11.与现有技术相比,本发明的有益效果是:
12.1、本结构可以使智能机器人机翼的拆装方便快捷,流程简便,固定牢固;
13.2、本结构尤其适用在操作空间小,玻璃钢或碳纤维外壳不需要打孔,使得壳体外
观更加精美。
附图说明
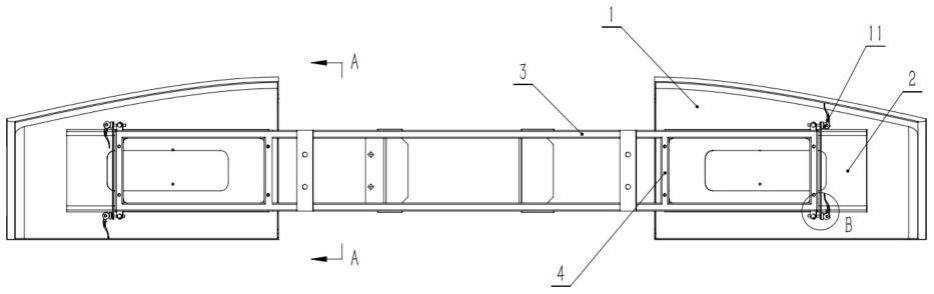
14.图1是本发明的整体结构示意图;
15.图2是本发明的a剖面结构示意图;
16.图3是本发明的b局部结构示意图;
17.图4是本发明的正面结构示意图;
18.图中:1-机翼;2-滑动钣金;3-机翼支架;4-加强方管;5-右导向滑槽;6-左导向滑槽;7-弹簧圆头固定柱;8-螺母固定块;9-锁紧螺母;10-限位板;11-快拆杆。
具体实施方式
19.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
20.具体的请参照图1-4,一种检测机器人外壳滑动式快拆结构,包括机翼支架3,所述机翼支架3上面右侧安装右导向滑槽5,所述机翼支架3上面左侧安装左导向滑槽6,所述右导向滑槽5和所述左导向滑槽6滑动连接滑动钣金2,所述滑动钣金2上面固定安装在机翼1底面,所述滑动钣金2下面一侧固定安装限位板10,所述限位板10两端穿过快拆杆11,所述机翼支架3中间固定安装加强方管4,所述机翼支架3两侧固定安装螺母固定块8,所述螺母固定块8中间固定安装锁紧螺母9,所述右导向滑槽5和所述左导向滑槽6内侧固定连接弹簧圆头固定柱7,所述弹簧圆头固定柱7下面贴合滑动钣金2,其中滑动钣金2预埋在机翼1上成为一体,在安装机翼时,打开2个快拆杆11,滑动钣金2插入右导向滑槽5和左导向滑槽6的对应滑槽后,推动机翼1,滑动钣金2带动机翼1沿着滑槽在机翼支架3上向中心滑动,在滑动钣金2下方的限位板10碰到限位后,拨动快拆杆11,锁紧机翼1,在拆卸机翼时,先松开快拆杆11,并将其旋向一侧,向外侧推动机翼1,则可将机翼1连同预埋为一体的滑动钣金2一块取下,这种导向槽滑动,快拆杆锁紧的快拆结构,可节省机翼拆卸的时间,在示意图4中,机翼外壳不打孔,手和工具安装操作空间很小的情况下,可提高效率,方便操作。
21.以上所述仅为本发明的较佳实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种检测机器人外壳滑动式快拆结构,其特征在于:包括机翼支架(3),所述机翼支架(3)上面右侧安装右导向滑槽(5),所述机翼支架(3)上面左侧安装左导向滑槽(6),所述右导向滑槽(5)和所述左导向滑槽(6)滑动连接滑动钣金(2),所述滑动钣金(2)上面固定安装在机翼(1)底面。2.根据权利要求1所述的一种检测机器人外壳滑动式快拆结构,其特征在于:所述滑动钣金(2)下面一侧固定安装限位板(10),所述限位板(10)两端穿过快拆杆(11)。3.根据权利要求1所述的一种检测机器人外壳滑动式快拆结构,其特征在于:所述机翼支架(3)中间固定安装加强方管(4),所述机翼支架(3)两侧固定安装螺母固定块(8),所述螺母固定块(8)中间固定安装锁紧螺母(9)。4.根据权利要求1所述的一种检测机器人外壳滑动式快拆结构,其特征在于:所述右导向滑槽(5)和所述左导向滑槽(6)内侧固定连接弹簧圆头固定柱(7),所述弹簧圆头固定柱(7)下面贴合滑动钣金(2)。5.根据权利要求1所述的一种检测机器人外壳滑动式快拆结构,其特征在于:所述机翼(1)采用玻璃钢或碳纤维制作。
技术总结
本发明涉及智能机器人技术领域,具体是一种检测机器人外壳滑动式快拆结构,包括机翼支架,所述机翼支架上面右侧安装右导向滑槽,所述机翼支架上面左侧安装左导向滑槽,所述右导向滑槽和所述左导向滑槽滑动连接滑动钣金,所述滑动钣金上面固定安装在机翼底面上,所述滑动钣金一侧固定安装限位板,所述机翼支架两侧安装螺母固定块,所述螺母固定块中间固定安装锁紧螺母,所述锁紧螺母固定连接快拆杆,所述快拆杆穿过限位板,本结构使智能机器人机翼的拆装方便快捷。拆装方便快捷。拆装方便快捷。
技术研发人员:杨洋 武军舰 胡少南 成銮 刘静
受保护的技术使用者:山东鼎目机器人科技有限公司
技术研发日:2022.07.22
技术公布日:2022/9/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1