搬运机器人及仓储系统的制作方法
本申请涉及智能仓储,尤其涉及一种搬运机器人及仓储系统。
背景技术:
1、随着人工智能技术、自动化技术、信息技术的飞速发展,末端物流的智能化程度将不断提高,智能物流终端是末端物流发展的必然趋势,而搬运机器人是可以实现智能物流终端进行自动化搬运作业的主要设备之一,通过搬运机器人可以减轻人类繁重的体力劳动。
2、但是,现有的搬运机器人在投入使用前需要在货架上配置相应的专用轨道,这就需要对现有货架进行二次改造,改造成本高,且不利于各个货架的兼容。
技术实现思路
1、本申请的目的在于提供一种搬运机器人及仓储系统,以解决现有搬运机器人使用时需要在货架上布置专用轨道,导致改造成本高,且不利于各货架兼容的问题。
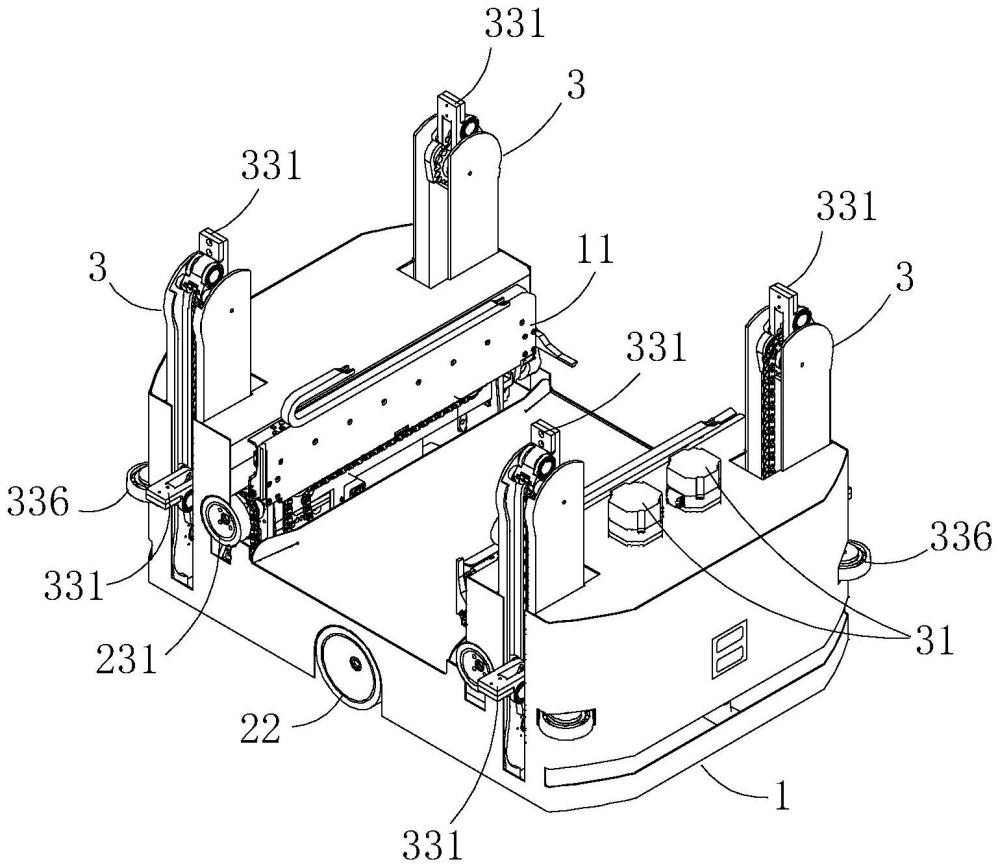
2、本申请的第一方面提供了一种搬运机器人,其中,包括:
3、本体,所述本体上设置有货叉;
4、行走组件,连接于所述本体;
5、攀爬组件,所述攀爬组件包括第一驱动部件、第一传动部件和多个攀爬部件,所述攀爬部件的一端与所述第一传动部件连接,所述攀爬部件的另一端用于支撑在货架的横梁上;
6、所述第一驱动部件与所述第一传动部件传动连接,用于驱动所述第一传动部件带动多个所述攀爬部件沿环形轨迹运动,使多个所述攀爬部件中的至少两个交替支撑在不同高度的所述横梁上。
7、在一种可能的设计中,所述攀爬组件还包括立柱,所述立柱设置有轨道;
8、所述攀爬部件包括攀爬手指、连接块和导向件;
9、所述连接块固定连接于所述第一传动部件;
10、所述攀爬手指与所述连接块转动连接;
11、所述导向件连接于所述攀爬手指,且所述导向件与所述轨道可移动连接,所述攀爬手指通过所述导向件与所述轨道的配合与所述横梁抵接或分离。
12、在一种可能的设计中,所述轨道包括内轨道和外轨道,所述内轨道与所述外轨道之间设置有轨道槽,所述导向件设置于所述轨道槽内;
13、所述轨道槽包括第一过渡段、平直段和第二过渡段,所述第一过渡段和所述第二过渡段的宽度均大于所述平直段的宽度;
14、所述攀爬手指通过所述导向件和所述第一过渡段的配合与所述横梁接触;
15、所述攀爬手指通过所述导向件与所述平直段的配合支撑于所述横梁;
16、所述攀爬手指通过所述导向件与所述第二过渡段的配合与所述横梁分离。
17、在一种可能的设计中,所述导向件包括两个滚子轴承,两个所述滚子轴承的内圈与所述攀爬手指固定相连,两个所述滚子轴承的外圈滚动设置于所述轨道槽内。
18、在一种可能的设计中,所述攀爬部件还包括发条弹簧,所述发条弹簧的一端连接于所述连接块,所述发条弹簧的另一端连接于所述攀爬手指。
19、在一种可能的设计中,所述攀爬部件还包括纠偏轮,所述纠偏轮连接于所述攀爬手指。
20、在一种可能的设计中,所述行走组件包括第二驱动部件、地面行走轮组、货架行走轮组和第二传动部件,所述第二驱动部件安装于所述本体,且所述第二驱动部件与所述地面行走轮组相连,用于控制所述地面行走轮组转动;
21、所述地面行走轮组的传动部通过所述第二传动部件与所述货架行走轮组的传动部传动连接,以带动所述货架行走轮组转动。
22、在一种可能的设计中,所述行走组件还包括伸出机构,所述伸出机构连接于所述本体,所述伸出机构的驱动端与所述货架行走轮组连接,用于控制所述货架行走轮组轴向伸出或缩回。
23、在一种可能的设计中,所述伸出机构包括第三驱动部件、第三传动部件和推拉件;
24、所述推拉件的一端连接于所述货架行走轮组,另一端连接于所述第三传动部件;
25、所述第三驱动部件安装于所述本体,且所述第三驱动部件与所述第三传动部件相连,用于驱动所述第三传动部件运动,以带动所述推拉件沿所述货架行走轮组的轴向进行伸出或缩回。
26、在一种可能的设计中,所述货架行走轮组设置有偶数个,且对称布置于所述本体的两侧;
27、所述伸出机构包括两个推拉件,两个所述推拉件分别连接于所述第三传动部件上传动方向相反的两端,且两个推拉件与对应的一个货架行走轮组连接;
28、所述第三驱动部件控制所述第三传动部件运动以带动两个推拉件同步反向运动。
29、在一种可能的设计中,所述货架行走轮组包括行走轮、导向轮和连接架;
30、所述连接架的一端与所述推拉件远离所述第三传动部件的一端连接,所述连接架的另一端与所述行走轮和所述导向轮转动连接;
31、所述行走轮和所述导向轮的轴线相互垂直,所述行走轮用于与所述横梁的上表面抵接,所述导向轮用于与所述横梁的侧表面抵接。
32、本申请的第二方面还提供了一种仓储系统,其中,包括货架和本申请第一方面提供的搬运机器人,所述货架包括多个横梁,多个所述横梁在所述货架的高度方向上等间隔分布,所述攀爬部件中的至少两个交替支撑在不同高度的所述横梁上。
33、在一种可能的设计中,沿所述货架的高度方向,位于所述第一传动部件同侧的相邻两个所述攀爬部件之间的距离等于相邻两个所述横梁之间的距离。
34、本申请提供的技术方案可以达到以下有益效果:
35、本申请提供的搬运机器人及仓储系统,无需对货架进行二次改造来设置专用的轨道,仅需利用货架现有的横梁即可实现搬运机器人的爬升,从而极大程度地节省了货架的改造成本。
36、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:
1.一种搬运机器人,其特征在于,包括:
2.根据权利要求1所述的搬运机器人,其特征在于,所述攀爬组件(3)还包括立柱(34),所述立柱(34)设置有轨道(341);
3.根据权利要求2所述的搬运机器人,其特征在于,所述轨道(341)包括内轨道(341b)和外轨道(341a),所述内轨道(341b)与所述外轨道(341a)之间设置有轨道槽(341c),所述导向件(333)设置于所述轨道槽(341c)内;
4.根据权利要求3所述的搬运机器人,其特征在于,所述导向件(333)包括两个滚子轴承,两个所述滚子轴承的内圈与所述攀爬手指(331)固定相连,两个所述滚子轴承的外圈滚动设置于所述轨道槽(341c)内。
5.根据权利要求2所述的搬运机器人,其特征在于,所述攀爬部件(33)还包括发条弹簧(335),所述发条弹簧(335)的一端连接于所述连接块(332),所述发条弹簧(335)的另一端连接于所述攀爬手指(331)。
6.根据权利要求2所述的搬运机器人,其特征在于,所述攀爬部件(33)还包括纠偏轮(336),所述纠偏轮(336)连接于所述攀爬手指(331)。
7.根据权利要求1-6任一项所述的搬运机器人,其特征在于,所述行走组件(2)包括第二驱动部件(21)、地面行走轮组(22)、货架行走轮组(23)和第二传动部件(24),所述第二驱动部件(21)安装于所述本体(1),且所述第二驱动部件(21)与所述地面行走轮组(22)相连,用于控制所述地面行走轮组(22)转动;
8.根据权利要求7所述的搬运机器人,其特征在于,所述行走组件(2)还包括伸出机构(25),所述伸出机构(25)连接于所述本体(1),所述伸出机构(25)的驱动端与所述货架行走轮组(23)连接,用于控制所述货架行走轮组(23)轴向伸出或缩回。
9.根据权利要求8所述的搬运机器人,其特征在于,所述伸出机构(25)包括第三驱动部件(251)、第三传动部件(252)和推拉件(253);
10.根据权利要求9所述的搬运机器人,其特征在于,所述货架行走轮组(23)设置有偶数个,且对称布置于所述本体(1)的两侧;
11.根据权利要求9所述的搬运机器人,其特征在于,所述货架行走轮组(23)包括行走轮(231)、导向轮(232)和连接架(233);
12.一种仓储系统,其特征在于,包括货架(100)和权利要求1-9任一项所述搬运机器人(200),所述货架(100)包括多个横梁(110),多个所述横梁(110)在所述货架(100)的高度方向上等间隔分布,所述攀爬部件(33)中的至少两个交替支撑在不同高度的所述横梁(110)上。
13.根据权利要求12所述的仓储系统,其特征在于,沿所述货架(100)的高度方向,位于所述第一传动部件(32)同侧的相邻两个所述攀爬部件(33)之间的距离等于相邻两个所述横梁(110)之间的距离。
技术总结
本申请提供了一种搬运机器人及仓储系统,其中,该搬运机器人包括本体、行走组件和攀爬组件。本体上设置有货叉;行走组件连接于本体;攀爬组件包括第一驱动部件、第一传动部件和多个攀爬部件,攀爬部件的一端与第一传动部件连接,攀爬部件的另一端用于支撑在货架的横梁上;第一驱动部件与第一传动部件传动连接,用于驱动第一传动部件带动多个攀爬部件沿环形轨迹运动,使多个攀爬部件中的至少两个交替支撑在不同高度的横梁上。本申请提供的搬运机器人及仓储系统,无需对货架进行二次改造来设置专用的轨道,仅需利用货架现有的横梁即可实现搬运机器人的爬升,从而极大程度地节省了货架的改造成本。
技术研发人员:高鹏,王朋辉,徐爽,陈叶广,徐圣东
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!