一种气动肌肉驱动的仿生柔性机械臂
1.本发明属于柔性机械臂技术领域,尤其涉及一种气动肌肉驱动的仿生柔性机械臂。
背景技术:
2.刚性机械臂应用范围较广,但结构复杂、灵活性较差,比较依赖于基座平移平台的运动性能,在狭小空间作业难免受到限制。相比于刚性机械臂,由柔性材料驱动的柔性机械臂具有高柔顺性、高机动性、灵活性和人机交互安全性等特点。
3.传统柔性机械臂采用线驱动的方式,该驱动方式带负载能力弱,驱动线易发生形变,造成驱动力不足。且这种驱动方式具有传动效率低、维护难度高和可靠性低缺点。
4.气动肌肉驱动器具有结构简单、驱动力大、柔顺性好特点,相比于线驱动,其传动效率也更高。采用拮抗式气动肌肉驱动器和人体肌腱传动原理一致,符合仿生学设计的背景和要求。中国专利(公开号:cn112621809a,公开日:2021年04月09日)公开了一种柔性旋转关节模块及气动机械臂,通过气缸驱动,将气缸上的活塞杆的直线运动转换为旋转运动,但该结构复杂、质量重、占地面积较大。中国专利(公开号:cn206200966u,公开日:2017年05月31日)公开了一种气动串联的柔性机械臂,由多个结构相同、尺寸递减的驱动单元串联组成,但该结构复杂、仿生性能不明显。
技术实现要素:
5.针对现有技术存在的不足,本发明提供一种气动肌肉驱动的仿生柔性机械臂,适用于有气源的场所,如工厂、医院有气源的场所,解决目前刚性机械臂结构复杂、灵活性差以及以线驱动的传统柔性机械臂驱动力有限、维护难度高、难以广泛应用的问题。
6.一种气动肌肉驱动的仿生柔性机械臂,包括位于上部的仿生肘关节和串联在其下部的仿生腕关节,仿生肘关节具有一个旋转自由度,能够完成肘关节的屈/伸运动,仿生腕关节具有两个旋转自由度,能够完成腕关节的屈/伸和尺偏/桡偏运动。
7.仿生肘关节的屈/伸运动极限角度为74
°
,仿生腕关节的屈/伸极限角度为70
°
,尺偏/桡偏极限角度为45
°
。
8.所述仿生肘关节包括固定平台、气动人工肌肉驱动器、肘关节支撑轴和转动件,所述固定平台上留有通孔,用于机械臂上端的固定;所述肘关节支撑轴一端螺栓连接在固定平台上,使肘关节支撑轴固定,另一端铰接在转动件的一端;转动件的另一端与仿生腕关节的一端螺栓连接;所述气动人工肌肉驱动器一端通过上连接件铰接在固定平台上,另一端铰接在转动件上。
9.所述仿生肘关节包括两根气动人工肌肉驱动器,分布在肘关节支撑轴的两侧。
10.所述仿生腕关节包括连接平台、上连接件、气动人工肌肉驱动器和仿生腕关节转动结构,转动件的另一端与仿生腕关节的连接平台螺栓连接;所述上连接件固定在连接平台上,仿生腕关节转动结构的一端与连接平台固定连接,气动人工肌肉驱动器一端固定在
上连接件上,另一端铰接在仿生腕关节转动结构的另一端。
11.所述仿生腕关节包括四根气动人工肌肉驱动器,均布在连接平台上。
12.所述气动人工肌肉驱动器包括堵头、卡箍、编织网和橡胶管,所述橡胶管的两端套在堵头上并用胶带缠绕密封,编织网套在橡胶管外侧,并用卡箍锁紧,固定在堵头上;所述堵头上开设有通孔,用于其两端的铰链连接;其中位于上端的堵头上开设有气孔,与橡胶管内部相通,与气源连接并使用生料带密封,用于向橡胶管内部充气。
13.所述仿生腕关节转动结构包括腕关节支撑轴、上转动件、下转动件、下连接件和末端平台,所述腕关节支撑轴顶部开设有连接孔,用于与连接平台固定连接,腕关节支撑轴的另一端铰接在上转动件的一端,上转动件的另一端铰接在下转动件上,下转动件固定在末端平台上;下连接件均布在下转动件两侧,固定在末端平台上;所述仿生腕关节中的气动人工肌肉驱动器铰接在上转动件及下连接件上。
14.所述仿生腕关节中的四根气动人工肌肉驱动器,其中相对的两个铰接在上转动件上,另外两对的两个铰接在下连接件上。
15.本发明的有益效果是:本发明的仿生柔性机械臂的结构简单、质量轻、成本低、易维护。本发明中的气动人工肌肉驱动器包括了编织网、橡胶管、堵头、卡箍,除了堵头需要用铝合金加工以保证其气密性,其余组件均采用pla+材料,利用3d打印技术制作,该材料重量轻,具有高韧性。
16.本发明采用仿生肘关节和仿生腕关节的设计,具有结构紧凑、体积小、灵活性高、工作空间范围大特点。
17.本发明与人体上肢骨骼肌结构、传动原理和功能相近,有良好的仿生性能。
18.本发明的仿生柔性机械臂的力学性能与生物肌肉类似,其具有的上述特点,使其相比于刚性机械臂和传统线驱机械臂,更具优势。
19.与中国专利(公开号:cn112621809a,公开日:2021年04月09日)公开的一种柔性旋转关节模块及气动机械臂相比,本发明采用气动肌肉驱动,带动末端平台转动,实现了直线运动转换为旋转运动,且结构简单、体积小、柔顺性好。
20.与中国专利(公开号:cn206200966u,公开日:2017年05月31日)公开了一种气动串联的柔性机械臂相比,本发明的气动人工肌肉驱动器为并联和串联共同组成,仿生肘关节和仿生腕关节的气动人工肌肉驱动器均构成拮抗式结构,仿生肘关节和仿生腕关节的气动人工肌肉驱动器又以串联连接。因此,本发明更具仿生性。
附图说明
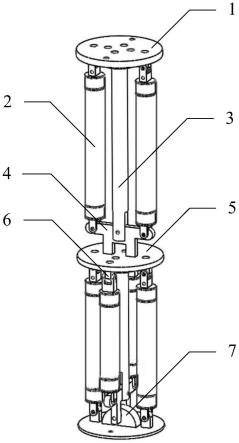
21.图1为本发明提供的仿生柔性机械臂的结构示意图;
22.图2为本发明中中的气动人工肌肉驱动器的结构示意图;
23.图3为本发明中仿生腕关节转动结构示意图;
24.其中,
25.1-固定平台,2-气动人工肌肉驱动器,21-堵头,211-通孔,212-气孔,22-卡箍,23-编织网,24-橡胶管,3-肘关节支撑轴,4-转动件,5-连接平台,6-上连接件,7-仿生腕关节转动结构,71-腕关节支撑轴,711-连接孔,72-上转动件,73-下转动件,74-下连接件,75-末端平台。
具体实施方式
26.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明的技术方案和效果作详细描述。
27.如图1所示,一种气动肌肉驱动的仿生柔性机械臂,仿造人体上肢骨骼肌设计,包括位于上部的仿生肘关节和串联在其下部的仿生腕关节;仿生肘关节具有一个旋转自由度,能够完成肘关节的屈/伸运动,屈/伸运动极限角度为74
°
;仿生腕关节具有两个旋转自由度,能够完成腕关节的屈/伸和尺偏/桡偏运动,其中屈/伸极限角度为70
°
,尺偏/桡偏极限角度为45
°
。
28.所述仿生肘关节包括固定平台1、气动人工肌肉驱动器2、肘关节支撑轴3和转动件4,所述固定平台1上留有通孔,用于机械臂上端的固定;所述肘关节支撑轴3一端螺栓连接在固定平台1上,使肘关节支撑轴3固定,另一端铰接在转动件4的一端;转动件4的另一端与仿生腕关节的一端螺栓连接。所述气动人工肌肉驱动器2一端通过上连接件6铰接在固定平台1上,另一端铰接在转动件4上,本实施例仿生肘关节中包括两根气动人工肌肉驱动器2,分布在肘关节支撑轴3的两侧。
29.所述仿生腕关节包括连接平台5、上连接件6、气动人工肌肉驱动器2和仿生腕关节转动结构7,转动件4的另一端与仿生腕关节的连接平台5螺栓连接。所述上连接件6固定在连接平台5上,仿生腕关节转动结构7的一端与连接平台5固定连接,气动人工肌肉驱动器2一端固定在上连接件6上,另一端铰接在仿生腕关节转动结构7的另一端。本实施例中包括四根气动人工肌肉驱动器2,均布在连接平台5上。
30.本发明中仿生肘关节和仿生腕关节中的气动人工肌肉驱动器2的关系为并联,构成拮抗式结构,而仿生肘关节和仿生腕关节的气动人工肌肉驱动器2又以串联连接,包含了仿造人体上肢骨骼肌的传动原理和自由度数,更具仿生性。
31.如图2所示,所述气动人工肌肉驱动器2包括堵头21、卡箍22、编织网23和橡胶管24,所述橡胶管24的两端套在堵头21上并用胶带缠绕密封,编织网23套在橡胶管24外侧,并用卡箍22锁紧,固定在堵头21上;所述堵头21上开设有通孔211,用于其两端的铰链连接;其中位于上端的堵头21上开设有气孔212,与橡胶管24内部相通,与气源连接并使用生料带密封,用于向橡胶管24内部充气。
32.如图3所示,所述仿生腕关节转动结构7包括腕关节支撑轴71、上转动件72、下转动件73、下连接件74和末端平台75,所述腕关节支撑轴71顶部开设有连接孔711,用于与连接平台5固定连接,腕关节支撑轴71的另一端铰接在上转动件72的一端,上转动件72的另一端铰接在下转动件73上,下转动件73固定在末端平台75上;下连接件74均布在下转动件73两侧,固定在末端平台75上。所述仿生腕关节中的气动人工肌肉驱动器2铰接在上转动件72及下连接件74上,本实施例中仿生腕关节中的四个气动人工肌肉驱动器2,其中相对的两个铰接在上转动件72上,另外两对的两个铰接在下连接件74上。
33.仿生肘关节的两根气动人工肌肉驱动器2构成拮抗式结构,仿生腕关节中的四根气动人工肌肉驱动器2构成两个拮抗式结构,四根肌肉相隔90
°
均匀分布,其中非相邻的两根气动肌肉为一对,当两根气动人工肌肉驱动器2产生压强差时,会带动气动人工肌肉驱动器2所连接的平台向压强大的一侧偏转。
34.使用过程中,在固定平台1上安装九轴传感器,将信号反馈给电脑主机,即可测量
出转角的角度值。在使用过程中,气源通过气孔212向气动人工肌肉驱动器2的其中一根气动肌肉充气,另一根不充气产生压强差,当机械臂到达预先指定的弯曲角度后停止充气。在充入气体后,内层橡胶管24会径向膨胀,而外层编织网23起到约束作用,限制了过度的径向膨胀,转而产生收缩变形。肘关节气动肌肉驱动器的充气导致了转动件4与肘关节支撑轴3的相对转动,腕关节气动肌肉驱动器的充气则带动了连接平台5和末端平台75的转动。
35.本发明中整体装置质量小、运动范围大,可以通过末端平台75姿态角的反馈值实现精确的运动控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1