一种空间机械臂关节主动可控反驱控制方法与流程
1.本发明涉及到空间机器人领域,可以应用到具有反驱要求的空间机构中。
背景技术:
2.空间机械臂关节在设计和装配过程中会对正向驱动力矩进行设计和控制,既实现从驱动电机、传动系统到输出端的力矩特性控制,反向驱动力矩可通过测量获取。但在空间机械臂系统中,需要使用关节反驱力矩性能实现特定任务,反驱力矩特性是指从输出端外力、传动系统到驱动电机的反向运动特性。通常,关节等传动系统的正驱特性和反驱特性存在较大差异,特别是在使用行星减速器的传动系统中,差异更加明显。这导致传动系统在设计时无法同时控制正驱和反驱的传动特性,对于一些有反驱特性要求的系统,只能通过试验验证反驱特性是否满足要求,无法实现对反驱特性的主动控制。且随着关节使用次数的增加,反驱特性发生变化,特别是在寿命末期,反驱力矩特性将出现明显的变化,无法实现对反驱力矩特性的全周期控制。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提供了一种空间机械臂关节主动可控反驱控制方法,通过设计关节主动可控反驱控制方法,解决关节反驱力矩不可控的问题,达到对空间机械臂关节反驱力矩全寿命周期控制的目的。
4.本发明的技术解决方案是:
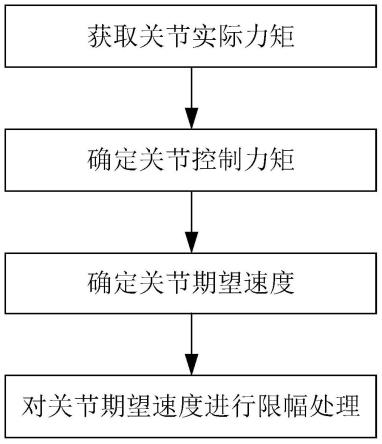
5.一种空间机械臂关节主动可控反驱控制方法,包括步骤如下:
6.1)利用力矩传感器获得关节输出端的关节实际力矩m
ji
;
7.2)根据关节实际力矩的绝对值|m
ji
|,确定当前第k个解算周期的关节控制力矩mj(k);
8.3)根据步骤2)获得的关节控制力矩mj(k),确定当前第k个解算周期的关节期望速度v
imp
(k);
9.4)对步骤3)获得的关节期望速度v
imp
(k)进行限幅处理,获得限幅处理后的关节期望速度v
imp
′
(k),使用限幅处理后的关节期望速度v
imp
′
(k)作为关节的期望转动速度。
10.优选地,步骤2)确定关节控制力矩mj的方法,具体为:
11.在关节实际力矩绝对值|m
ji
|增大过程中,若|m
ji
|≥m
indeadarea
,则令当前第k个解算周期的关节控制力矩mj(k)等于关节实际力矩值m
ji
;反之,则令当前第k个解算周期的关节控制力矩mj为0;
12.在关节实际力矩|m
ji
|减小过程中,若|m
ji
|<m
outdeadarea
,则令当前第k个解算周期的关节控制力矩mj(k)为0,反之,则令当前第k个解算周期的关节控制力矩mj(k)等于关节实际力矩值m
ji
;
13.其中,m
indeadarea
为进入有效力矩值,m
outdeadarea
为退出有效力矩值。
14.优选地,进入有效力矩值m
indeadarea
的确定方法如下:
力矩特性控制。
36.反驱控制器的框图如图2所示,反驱控制器由力矩滞回、反驱特性模拟器和速度限幅组成。反驱控制器的输入包括关节期望反驱力矩和关节实际力矩,其中关节期望反驱力矩包含进入有效力矩值m
indeadarea
和退出有效力矩值m
outdeadarea
。
37.本发明将关节期望反驱力矩和关节实际力矩输入力矩滞回环节,力矩滞回环节的处理流程如图3所示,包括步骤如下:
38.1)利用一维力矩传感器获得关节输出端的关节实际力矩m
ji
;
39.2)在关节实际力矩绝对值|m
ji
|增大过程中,若|m
ji
|≥m
indeadarea
,则令关节控制力矩mj(k)等于关节实际力矩值m
ji
;反之,则令关节控制力矩mj(k)为0;
40.在关节实际力矩绝对值|m
ji
|减小过程中,若|m
ji
|<m
outdeadarea
,则令关节控制力矩mj(k)为0,反之,则令关节控制力矩mj(k)等于关节实际力矩值m
ji
;
41.进入有效力矩值m
indeadarea
的确定方法为:根据任务对关节反驱力矩的需求范围取值,若关节反驱力矩需求范围的中间值小于或等于关节最大输出力矩的1/2,则令m
indeadarea
等于关节反驱力矩需求范围的中间值;反之,则令m
indeadarea
小于或等于关节最大输出力矩的1/2。
42.退出有效力矩值m
outdeadarea
确定方法为根据进入有效力矩值m
indeadarea
的设置值和一维力矩传感器的精度进行取值,建议为一维力矩传感器精度的3-5倍或m
indeadarea
的1/2~2/3倍;
43.3)力矩滞回环节输出关节控制力矩mj(k),输入到反驱特性模拟器中,确定当前第k个解算周期的关节期望速度v
imp
(k);
44.反驱特性模拟器描述为:
[0045][0046]
其中,v
imp
(k)为关节期望速度,t
mf
和c为反映关节反驱阻尼和摩擦的系数,根据任务对关节反驱过程的特性进行设置,也可根据关节常温常压下的测试结果进行设置。t
mf
取值范围为0~1;c取值范围为不大于10-2
。
[0047]
4)关节期望速度经过速度限幅后,输出限幅后的关节期望速度v
imp
′
(k),描述为:
[0048][0049]
其中,v
impulim
为关节速度限幅上限,不超过关节正向最大速度的2/3,v
impdlim
为关节速度限幅下限,不超过关节反向最大速度的2/3。
[0050]
如图1所示,限幅后的关节期望速度v
imp
′
(k)作为关节速度闭环的输入,并通过速度闭环实现对关节期望速度的跟踪。
[0051]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明
的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。在不冲突的情况下,本申请实施例以及实施例中的技术特征可以相互组合。
[0052]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
技术特征:
1.一种空间机械臂关节主动可控反驱控制方法,其特征在于,包括:利用力矩传感器获得关节输出端的关节实际力矩m
ji
;根据关节实际力矩的绝对值|m
ji
|,确定当前第k个解算周期的关节控制力矩m
j
(k);根据获得的关节控制力矩m
j
(k),确定当前第k个解算周期的关节期望速度v
imp
(k);对获得的关节期望速度v
imp
(k)进行限幅处理,获得限幅处理后的关节期望速度v
imp
′
(k),使用限幅处理后的关节期望速度v
imp
′
(k)作为关节的期望转动速度。2.根据权利要求1所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述确定关节控制力矩m
j
的方法,具体为:在关节实际力矩绝对值|m
ji
|增大过程中,若|m
ji
|≥m
indeadarea
,则令当前第k个解算周期的关节控制力矩m
j
(k)等于关节实际力矩值m
ji
;反之,则令当前第k个解算周期的关节控制力矩m
j
为0;在关节实际力矩|m
ji
|减小过程中,若|m
ji
|<m
outdeadarea
,则令当前第k个解算周期的关节控制力矩m
j
(k)为0,反之,则令当前第k个解算周期的关节控制力矩m
j
(k)等于关节实际力矩值m
ji
;其中,m
indeadarea
为进入有效力矩值,m
outdeadarea
为退出有效力矩值。3.根据权利要求2所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述进入有效力矩值m
indeadarea
的确定方法如下:若关节反驱力矩需求范围的中间值小于或等于关节最大输出力矩的1/2,则令m
indeadarea
等于关节反驱力矩需求范围的中间值;反之,则令m
indeadarea
小于或等于关节最大输出力矩的1/2。4.根据权利要求2所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述退出有效力矩值m
outdeadarea
的确定方法如下:m
outdeadarea
等于力矩传感器精度的3-5倍或m
indeadarea
的1/2~2/3倍。5.根据权利要求1所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述确定当前第k个解算周期的关节期望速度v
imp
(k)的方法,具体为:其中,t
mf
为反映关节反驱阻尼的系数,c为反映关节反驱摩擦系数。6.根据权利要求5所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述t
mf
取值范围为0~1。7.根据权利要求5所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述c取值范围为不大于10-2
。8.根据权利要求1~7任意一项所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述获得限幅处理后的关节期望速度v
imp
′
(k)的方法,具体为:
其中,v
impulim
为关节速度限幅上限,v
impdlim
为关节速度限幅下限。9.根据权利要求8所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述v
impulim
不超过关节正向最大速度的2/3。10.根据权利要求8所述的一种空间机械臂关节主动可控反驱控制方法,其特征在于,所述v
impdlim
不超过关节反向最大速度的2/3。
技术总结
本发明一种空间机械臂关节主动可控反驱控制方法,通过主动施加输出力矩,使关节在外力和关节输出力的共同作用下实现反驱控制。通过检测关节输出端的力矩并通过反驱控制器实现对反驱刚度、阻尼特征的控制。通过一维力矩传感器测量关节输出端受力,与期望反驱力矩输入反驱控制器,反驱控制器根据期望反驱力矩需求,输出关节期望速度,并通过速度控制器和电流控制器实现对关节速度的控制,达到主动控制反驱力矩的目的。本发明反驱控制器由力矩滞回、反驱特性模拟器和速度限幅组成,可将期望反驱力矩和实际力矩转换为可控的关节期望速度。度。度。
技术研发人员:刘鑫 李德伦 王康 周东 张沛 辛鹏飞 高升 胡成威 张运 王友渔 余晟
受保护的技术使用者:北京空间飞行器总体设计部
技术研发日:2022.08.29
技术公布日:2022/12/19
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1