一种利用智能机械手臂调整预制构件垂直度的方法与流程
1.本发明属于建筑施工技术领域,具体涉及一种利用智能机械手臂调整预制构件垂直度的方法。
背景技术:
2.在预制装配式建筑领域中,预制装配式构件都具有“数量大、种类多、安装要求高、吊装风险大”的特征。在当前的技术条件下,这些特点在一定程度上给施工造成了困扰。如果在不提升施工机具性能和升级施工措施的情况下,无法发挥预制装配化建造的优势,与国家政策和行业领域技术发展方向及大趋势不一致。
3.随着装配式建筑的大面积推广应用,施工现场吊装作业越来越多,针对预制构件拼装的建筑机器人的应用还不广泛,这主要受制于工地现场的环境复杂且经常不具备供电的条件。目前预制构件的拼装多采用起重机起吊,人工推拉调锤,人工安装临时支撑固定。不仅存在安全风险,而且效率地下,施工精度难以把控。在现有技术条件下,开发一种具备预制构件自动调平的装置是必要的。
技术实现要素:
4.本发明的目的是根据上述现有技术的不足之处,提供一种利用智能机械手臂调整预制构件垂直度的方法,该方法通过将伸缩臂位置调整好后,伸缩臂上的夹持机构对竖向预制构件的顶部进行自动夹持,通过夹持机构上的力矩传感器判断是否夹持完成;夹持完成后,通过夹持机构上所设置的倾角传感器来实时测量竖向预制构件的角度信息,控制所述副伸缩臂的伸缩来对竖向预制构件的姿态进行粗调,并通过驱动所述第二夹持电动推杆伸缩以调整第二夹板的姿态来对竖向预制构件的姿态进行微调,直至达到要求的垂直度。
5.本发明目的实现由以下技术方案完成:一种利用智能机械手臂调整预制构件垂直度的方法,其特征在于所述方法包括以下步骤:s1: 拟建建筑第n-1层水电预埋、插筋、斜撑预埋件安装完成,梁板柱现浇混凝土完成浇筑后,准备吊装第n层的竖向预制构件前,利用塔吊将智能机械手臂系统吊装至所在楼层;s2:驱动所述智能机械手臂系统走行至吊装的第一块所述竖向预制构件前;s3:调整所述智能机械手臂系统上的夹持机构至所述竖向预制构件的顶部;其中,所述夹持机构包括固定于所述智能机械手臂系统的伸缩臂后部的第一夹持组件以及固定于所述伸缩臂前部的第二夹持组件;所述第一夹持组件上的第一夹板与所述第二夹持组件上的第二夹板围合构成卡钳;并于所述第二夹板的夹持面上贴合设置有一倾角传感器;s4:所述夹持机构上的所述卡钳对所述竖向预制构件的顶部进行夹持,以使所述第一夹板和所述第二夹板与所述竖向预制构件的侧壁面相贴合,所述倾角传感器实时测量所述竖向预制构件的角度信息,并根据所反馈的所述竖向预制构件的角度信息来实时调整
所述竖向预制构件的角度,直至达到设计垂直度状态;s5:完成第一块的所述竖向预制构件的垂直度调整后,在所述竖向预制构件与所述斜撑预埋件之间安装斜撑进行固定,卸掉所述竖向预制构件上的所述塔吊的吊钩;s6:移动所述智能机械手臂系统至下一块竖向预制构件前,重复步骤s2-步骤s5。
6.所述智能机械手臂系统包括移动车架、上装回转机构、升降臂、所述伸缩臂以及所述夹持机构,所述上装回转机构固定于所述移动车架上,所述升降臂呈竖向设置且其下端固定于所述上装回转机构上,所述伸缩臂包括主伸缩臂和副伸缩臂,所述主伸缩臂呈水平设置且固定于所述升降臂的上端,所述副伸缩臂经副臂回转机构可回转式安装于所述主伸缩臂的前端,所述夹持机构安装于所述副伸缩臂的前部。
7.所述移动车架包括底盘、走行轮以及安装在所述底盘与所述走行轮之间的四轮转向机构;所述底盘上安装有电源组件;所述底盘的框架呈“工”字型,其四个边角处分别设置有一辅助支腿,所述辅助支腿由翻转支腿、伸缩支腿、固定构架以及第一电动推杆组成;其中,呈l型的所述翻转支腿由横杆和竖杆组成,所述横杆的一端与所述底盘的边角铰接,所述电动推杆经所述固定构架固定于所述翻转支腿的所述竖杆上,所述竖杆上还竖向设置有所述伸缩支腿,所述伸缩支腿由所述第一电动推杆驱动伸缩,所述电动推杆由所述电源组件提供电力驱动;在所述移动车架移动时,将所述辅助支腿向上翻转至所述底盘上;在所述移动车架移动就位后,将所述辅助支腿从所述底盘上向下翻转至施工楼层地面,通过所述第一电动推杆驱动所述伸缩支腿伸展,以使所述移动车架由四条所述辅助支腿支撑。
8.所述升降臂包括固定立柱、活动臂以及第二电动推杆,所述固定立柱的底部固定安装于所述上装回转机构上,所述活动臂与所述固定立柱同轴活动式套接设置,所述第二电动推杆的下端固定于所述固定立柱上并由所述电源组件提供电力驱动,所述第二电动推杆的上端与所述活动臂固定连接以驱动所述活动臂作升降动作。
9.所述主伸缩臂包括第一基本臂、第一伸缩臂以及第三电动推杆,所述第一基本臂的后端固定于所述活动臂的上端、前端与所述第一伸缩臂同轴活动式套接设置,所述第三电动推杆的后端固定于所述第一基本臂上、前端与所述第一伸缩臂的前端固定连接以驱动所述第一伸缩臂作前后伸缩,所述第三电动推杆由所述电源组件提供电力驱动。
10.所述第一夹持组件包括固定于所述副伸缩臂后部侧壁面上的第一夹持电动推杆以及设置于所述第一夹持电动推杆前端的所述第一夹板;所述第二夹持组件包括第二夹持电动推杆、双轴连接支架以及所述第二夹板,所述第二夹持电动推杆的一端铰接于所述副伸缩臂前部的顶面上、另一端与所述双轴连接支架的上端相铰接,所述双轴连接支架的下端与所述副伸缩臂的前端相铰接,且所述第二夹板的上部固定于所述双轴连接支架上。
11.所述第一夹板和所述第二夹板的夹持面上分别设置有一橡胶块,所述第二夹板上的所述橡胶块内侧面预置有所述倾角传感器,所述倾角传感器经感应贴片与所述第二夹板的夹持面相贴合;在所述夹持机构对所述竖向预制构件夹持时,所述第一夹板与所述第二夹板上的所述橡胶块作为对所述竖向预制构件顶部的夹持接触点,所述倾角传感器贴合于所述竖向预制构件的墙面,所述倾角传感器与地面之间的夹角即为所述竖向预制构件与所述地面之间的夹角;根据所述倾角传感器的倾角数据,控制所述副伸缩臂的伸缩来对所述竖向预制构件的姿态进行粗调,并通过驱动所述第二夹持电动推杆伸缩以调整所述双轴连接支架以及所述第二夹板的姿态来对所述竖向预制构件的姿态进行微调,直至所述竖向预
制构件达到要求的垂直度。
12.所述第一夹持电动推杆和所述第二夹持电动推杆内分别设置有力矩传感器。
13.在完成对所述竖向预制构件的垂直度调整后,利用扫描枪扫描所述竖向预制构件上的二维码,并将所要记录的施工信息进行上传。
14.本发明的优点是:(1)整机使用直流电源,工作不受场地电源限制;(2)走行使用轮式小车,方便灵活;(3)采用主、副臂结合方式,可以在定点位置完成多位置预制构件角度的调整,作业效率高;(4)采用智能化控制方案,结合高精度测量传感器,可以自动调整构件垂直度;(5)可以存储施工过程中预制构件的相关信息,与系统交互,便于系统数据采集。
附图说明
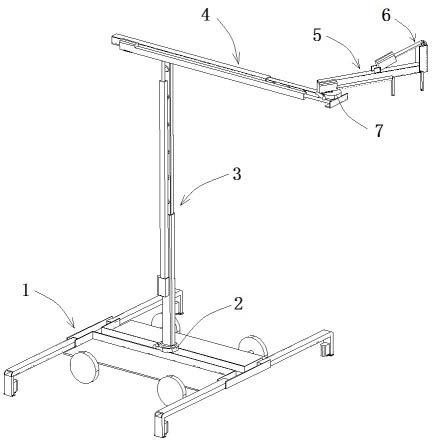
15.图1为本发明中智能机械手臂系统的结构示意图;图2为本发明中移动车架的局部示意图;图3为本发明中升降臂和主伸缩臂的局部示意图;图4为本发明中副伸缩臂和夹持机构的局部示意图;图5为本发明中智能机械手臂系统夹持竖向预制构件的示意图。
具体实施方式
16.以下结合附图通过实施例对本发明的特征及其它相关特征作进一步详细说明,以便于同行业技术人员的理解:如图1-5,图中各标记分别为:移动车架1、底盘11、走行轮12、辅助支腿13、辅助支腿131、第一电动推杆132、伸缩支腿133、上装回转机构2、升降臂3、固定立柱31、活动臂32、第二电动推杆33、主伸缩臂4、第一基本臂41、第一伸缩臂42以及第三电动推杆43、副伸缩臂5、夹持机构6、第一夹持电动推杆61、第一夹板62、第二夹板63、第二夹持电动推杆64、双轴连接支架65、橡胶块66、副臂回转机构7、竖向预制构件8。
17.实施例:如图1-5所示,本实施例具体涉及一种利用智能机械手臂调整预制构件垂直度的方法,该方法主要包括以下步骤:(s1)拟建建筑第n-1层水电预埋、插筋、斜撑预埋件安装完成,梁板柱现浇混凝土完成浇筑后,准备吊装第n层的竖向预制构件8前,利用塔吊将智能机械手臂系统吊装至所在楼层。
18.本实施例中的智能机械手臂系统包括移动车架1、上装回转机构2、升降臂3、主伸缩臂4、副臂回转机构7、副伸缩臂5以及夹持机构6,上装回转机构2安装于移动车架1的上部中心位置,升降臂3呈竖向设置且其下端同上装回转机构2固定连接,主伸缩臂4呈水平设置且固定于升降臂3的上端,副伸缩臂5的后端经副臂回转机构7可回转式安装于主伸缩臂4的前端,夹持机构6安装于副伸缩臂5的前部。
19.如图1、2所示,移动车架1包括底盘11、走行轮12以及安装在底盘11与走行轮12之间的四轮转向机构(图中未示出),通过四轮转向机构可用来减少转弯半径,使得智能手臂可以在操作面上顺利通行,走行轮12为大宽度扁平轮胎,用来增加和楼地面的接触面积,减少接触应力;底盘11上还安装有电源组件(图中未示出),电源组件可以是铁锂电池或其它直流/交流电源,用于为系统中各电动推杆、传感器以及控制系统进行电力供应。本实施例
中底盘11的框架主体呈“工”字型,其四个边角处分别铰接设置有一辅助支腿13,辅助支腿13可进行人工翻转收起和展开,即,在移动车架1移动过程中向上翻折收纳,而在移动就位开始夹持作业时将其向下翻转至如图1、2的状态,以提供足够的支撑力,保证整机工作的稳定性;辅助支腿13由翻转支架131、第一电动推杆132以及伸缩支腿133组成,翻转支架131呈l型,由横杆和竖杆组成,横杆一端同底盘11的框架边角相铰接,横杆水平向外延伸并同向下的竖杆固定连接,在竖杆的下部侧壁面上经固定构架安装第一电动推杆132,竖向安装的第一电动推杆132上同轴安装了伸缩支腿133,通过第一电动推杆132驱动伸缩支腿133向下伸展以支撑整个移动车架1与施工作业面,第一电动推杆132由前述的电源组件供应电力。
20.如图1、2、3所示,上装回转机构2设置在升降臂3与移动车架1之间,上装回转机构2由一体化回转机构和电机组成,一体化回转机构固定在底盘11的上表面,电机驱动该一体化回转机构的回转并由前述的电源组件供应电力。上装回转机构2位整个智能机械手臂系统提供回转动力,以在360
°
范围内回转,从而调整机械手臂的方位,对多个竖向预制构件进行调整工作。
21.如图1、2、3所示,升降臂3包括固定立柱31、活动臂32以及第二电动推杆33,其中,固定立柱31呈竖直方向设置,其下端固定安装在上装回转机构2上,其上端则同轴活动式套接入活动臂32,即,活动臂32可在固定立柱31中进行竖直方向的自由活动;第二电动推杆33的下端固定在固定立柱31的侧壁面上,而第二电动推杆33的上端则同活动臂32的上端固定连接,以使第二电动推杆33可驱动活动臂32可在竖直方向上进行自由升降操作,第二电动推杆33有前述的电源组件供应电力。具体而言,升降臂3上的活动臂32可以向上升起1000mm的距离,第二电动推杆33采用直流电源(电源组件)供应电力。收车时降低整机高度,便于运输、转场,工作时向上提升,便于夹持机构6可以跨越竖向预制构件8顶部。
22.如图1、2、3所示,主伸缩臂4包括第一基本臂41、第一伸缩臂42以及第三电动推杆43,其中,第一基本臂41呈水平方向设置,其后端固定于升降臂3的顶端(即活动臂32顶端),因此主伸缩臂4可随升降臂3进行竖直方向上的升降运动,第一基本臂41的前端则同轴设置了第一伸缩臂42,第一伸缩臂42和第一基本臂41之间为同轴相互套接关系,第三电动推杆43的后端固定在第一基本臂41上、前端同第一伸缩臂42的前端固定连接,因此,在第三电动推杆43的驱动之下,第一伸缩臂42可在水平方向上进行前后伸缩运动。具体而言,主伸缩臂4可以向前伸出1000mm的距离,采用直流电源(即前述的电源组件供电),收车时整机长度缩小,工作时则向前伸长,以将副伸缩臂5向前输送到不同的位置,以便于调整不同位置的竖向预制构件8。
23.如图1、4所示,副臂回转机构7设置在主伸缩臂4与副伸缩臂5之间,具体是由一体化回转机构和电机所组成的,副臂回转机构7安装在主伸缩臂4的前端,为副伸缩臂5的回转提供动力,以使副伸缩臂5可在一定范围内回转,实现同竖向预制构件8之间的位置匹配。副伸缩臂5为伸缩式机械臂结构(示意图中为避免线条混乱,未示出其伸缩式结构),以补足主伸缩臂4的不足,呈水平状态设置,其后端固定在副臂回转机构7上,而其前端则设置有夹持机构6。
24.如图1、4所示,夹持机构6包括固定于副伸缩臂5后部的第一夹持组件以及固定于副伸缩臂5前部的第二夹持组件;其中:第一夹持组件包括固定于副伸缩臂5后部侧壁面上的第一夹持电动推杆61以及设置在第一夹持电动推杆61前端的第一夹板62;第二夹持组件
包括第二夹持电动推杆64、双轴连接支架65以及第二夹板63,第二夹持电动推杆64的一端铰接于副伸缩臂5的前部顶面上、另一端与双轴连接支架65的上端相铰接,而双轴连接支架65的下端则同副伸缩臂5的前端相铰接,且第二夹板63的上部固定于双轴连接支架65上;如图4所示,在第二夹持电动推杆64的顶推之下,双轴连接支架65及其上的第二夹板63随之发生转动,从而可改变夹持角度和力度。
25.进一部的,在第一夹板62和第二夹板63的夹持面上分别固定有橡胶块66,橡胶块66作为第一夹板62和第二夹板63同竖向预制构件8之间的夹持接触件,以增强夹持贴合性;在第一夹持电动推杆61和第二夹持电动推杆64上分别内置有力矩传感器;且在双轴连接支架65上内置有倾角传感器,具体的,倾角传感器(图中未示出)与一感应贴片一体设计并贴合设置在第二夹板63夹持面与橡胶块66之间,倾角传感器包括mcu、mems加速度计、模数转换电路以及通讯单元,各元件集成于一非常小的电路板上面。在夹持过程中,夹持机构6的第二夹板63贴合在竖向预制构件8的表面,而倾角传感器66经其感应贴片贴合设置在第二夹板63上,相当于感应贴片与竖向预制构件8的倾角是一致的,因此感应贴片的倾角就是竖向预制构件8的倾角,无需再进行数据转换。
26.(s2)驱动移动车架1走行至吊装的第一块竖向预制构件8前,之后将辅助支腿13向下翻转至如图1、2的状态,从而提供足够的支撑力。
27.(s3)人工操作调整升降臂3、主伸缩臂4和副伸缩臂5,以使其上的夹持机构6达到可以夹持竖向预制构件8的状态。
28.(s4)由第一夹板62和第二夹板63所组成的卡钳对竖向预制构件8进行夹持,第一夹板62和第二夹板63上的橡胶块66同竖向预制构件8的墙壁相接触贴合,基于第一夹持电动推杆61和第二夹持电动推杆64上力矩传感器的设置来判断对于竖向预制构件8的夹持是否完成;第二夹板63上的倾角传感器实时测量竖向预制构件8的角度信息,并根据所反馈的竖向预制构件的角度信息来实时调整竖向预制构件8的角度,直至达到设计垂直度状态;具体而言:倾角传感器贴合于竖向预制构件8的墙面,倾角传感器与地面之间的夹角即为竖向预制构件8与地面之间的夹角;根据倾角传感器的倾角数据,控制副伸缩臂5的伸缩来对竖向预制构件8的姿态进行粗调,并通过驱动第二夹持电动推杆64伸缩以调整双轴连接支架65以及第二夹板63的姿态来对竖向预制构件8的姿态进行微调,直至竖向预制构件8达到要求的垂直度。通过双重调节,可以实现对竖向预制构件8的精确调整。
29.(s5)完成第一块的竖向预制构件8的垂直度调整后,在竖向预制构件8与斜撑预埋件之间安装斜撑进行固定,卸掉竖向预制构件8上的所述塔吊的吊钩。使用扫码抢,人工扫描预制构件上的二维码,机械臂上的终端会识别二维码的信息,施工过程中,终端记录施工过程中要记录的信息,施工完成后,根据通讯协议,上报到系统。
30.(s6)移动智能机械手臂系统至下一块竖向预制构件前,重复步骤s2-步骤s5。
31.本实施例的有益效果在于:通过对多功能智能化仿生机械手臂、竖向预制构件智能调垂支撑装置及其智慧大脑型管控中心的研究,开发预制构件和建筑外围护智慧化安装装备组,形成装配式建筑智能建造和质量管控核心体系化技术。机械手臂还有如下优点:(1)整机使用直流电源,工作不受场地电源限制;(2)走行使用轮式小车,方便灵活;(3)采用主、副臂结合方式,可以在定点位置完成多位置预制构件角度的调整,作业效率高;(4)采用
智能化控制方案,结合高精度测量传感器,可以自动调整构件垂直度;(5)可以存储施工过程中预制构件的相关信息,与系统交互,便于系统数据采集。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1