动平台结构和并联机器人的制作方法
本申请涉及工业机器人领域,特别涉及一种动平台结构和一种并联机器人。
背景技术:
1、现有的并联机器人(也可称之为delta机器人),其动平台结构通常采用电机搭配独立的减速器的结构,该类动平台结构的结构紧凑性差,且走管、走线等极不方便。
技术实现思路
1、本申请的一个目的在于提出一种动平台结构,传动机构与动平台及基座之间的紧凑布置,且走管、走线更方便。
2、为解决上述技术问题,本申请采用如下技术方案:
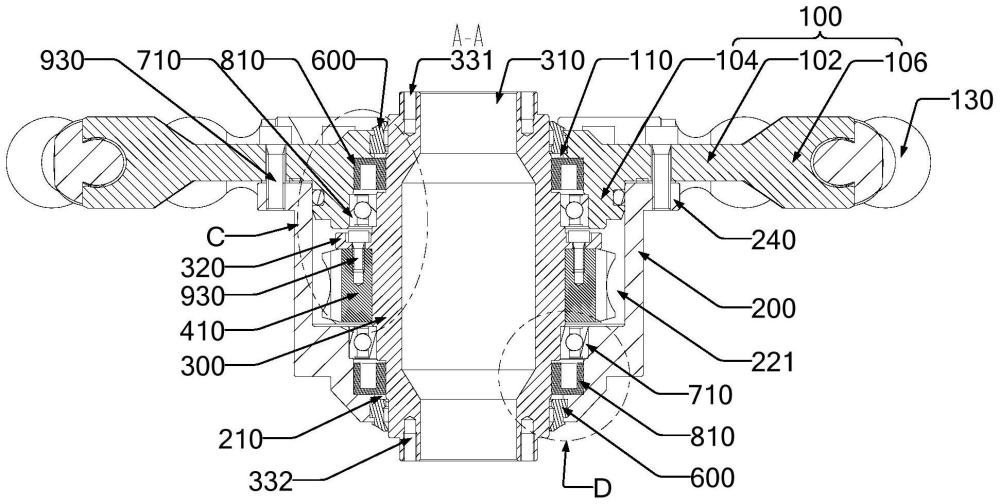
3、本申请一个方面的技术方案提出了一种动平台结构,包括:动平台,所述动平台设置有第一口;基座,与所述动平台相连,所述基座设置有第二口,且所述基座内形成有容纳室;第一轴,穿设在所述第一口、所述容纳室、所述第二口中,所述第一轴与所述动平台和所述基座中的至少一者转动连接,所述第一轴的内部中空,所述第一轴的两端分别设置有与所述第一轴的内部连通的开口;传动机构,容纳在所述容纳室中,所述传动机构的输出端与所述第一轴相连;驱动件,设在所述基座上,与所述传动机构的输入端相连。
4、根据本申请的一些技术方案,所述容纳室包括第一室和第二室,所述第一室从所述第一口向所述第二口延伸设置,所述第一轴贯穿所述第一室,且所述第一轴的一端穿设于所述第一口中,另一端穿设于所述第二口中,所述第二室位于所述第一轴的一侧,所述第二室与所述第一室连通;所述传动机构包括第一部件和第二部件,所述第一部件位于所述第一室内并且嵌套在所述第一轴的外侧,所述第一部件与所述第一轴相连而使得所述第一部件与所述第一轴能一起转动,所述第二部件位于所述第二室中,所述第二部件与所述第一部件之间轴向交错地布置,所述第二部件与所述第一部件啮合,所述驱动件位于所述第二室的一端,所述驱动件与所述第二部件相连,用以驱动所述第二部件转动。
5、根据本申请的一些技术方案,所述传动机构包括精密涡轮蜗杆机构;所述精密涡轮蜗杆机构的第一部件包括精密涡轮,第二部件包括能适配所述精密涡轮的精密蜗杆;或所述传动机构包括准双曲面齿轮机构;所述准双曲面齿轮机构的第一部件包括第一准双曲面齿轮,第二部件包括能适配所述第一准双曲面齿轮的第二准双曲面齿轮。
6、根据本申请的一些技术方案,所述第一轴的外侧壁上凸设有凸沿,所述凸沿位于所述第一口与所述第二口之间的位置处,所述第一部件的轴向一端靠在所述凸沿上,所述第一部件与所述凸沿通过紧固件连接在一起。
7、根据本申请的一些技术方案,所述动平台结构还包括若干防尘圈及若干第一密封圈;所述第一口与所述第一轴之间设置有所述防尘圈及所述第一密封圈,所述第二口与所述第一轴之间设置有所述防尘圈及所述第一密封圈。
8、根据本申请的一些技术方案,位于所述第一轴与所述第一口或所述第二口之间的所述防尘圈和所述第一密封圈轴向间距地设置,所述防尘圈位于所述第一密封圈远离所述传动机构的一侧;所述第一密封圈包括环形体,所述环形体上设置具有开口的凹槽,所述凹槽的开口位于所述环形体沿轴向远离所述防尘圈的一端;所述第一口的侧壁和所述第二口的侧壁中至少一者上设置凸块,所述防尘圈上设置有卡槽,所述凸块嵌合于所述卡槽中,用以限制所述防尘圈的轴向活动量;所述防尘圈为唇形密封圈,所述防尘圈的内侧面与所述第一轴位置相对,所述防尘圈的该内侧面上凸设有第一唇边和第二唇边,所述第一唇边与所述第二唇边之间沿轴向具有间距。
9、根据本申请的一些技术方案,所述第一口为轴向具有一定长度的结构,所述第一口的侧壁面和所述第一轴的侧壁面上分别设置阶梯结构,且所述第一口与所述第一轴之间阶梯结构位置对应,使得所述第一口与所述第一轴之间的位置处形成阶梯状排列设置的第一腔、第二腔和第三腔,所述第一腔位于所述第一口靠近所述传动机构的一端且容纳有一第一轴承,所述第三腔位于所述第一口远离所述传动机构的一端且容纳有一所述防尘圈,所述第二腔位于所述第一腔与所述第三腔之间且容纳有一所述第一密封圈;所述第二口为轴向具有一定长度的结构,所述第二口的侧壁面和所述第一轴的侧壁面上分别设置阶梯结构,且所述第二口与所述第一轴之间阶梯结构位置对应,使得所述第二口与所述第一轴之间的位置处形成阶梯状排列设置的第四腔、第五腔和第六腔,所述第四腔位于所述第二口靠近所述传动机构的一端且容纳有一第一轴承,所述第六腔位于所述第二口远离所述传动机构的一端且容纳有一所述防尘圈,所述第五腔位于所述第四腔与所述第六腔之间且容纳有一所述第一密封圈。
10、根据本申请的一些技术方案,所述基座的一端设置有安装口及位于所述安装口周围的法兰边,所述基座的另一端设置有所述第二口,所述动平台位于所述基座设有所述安装口的一端,且所述动平台与所述法兰边相连,所述动平台结构还包括第二密封圈,所述第二密封圈位于所述动平台与所述基座之间,用以密封所述动平台与所述基座之间的缝隙;和/或所述动平台结构还包括球头,所述动平台上设置有一个或多个所述球头。
11、根据本申请的一些技术方案,在所述基座上于所述第二室两端的位置处分别设置有端口,所述驱动件穿设于其中一个所述端口内,且所述驱动件与该端口之间设置有第三密封圈;所述动平台结构还包含有端盖和第二轴,所述端盖封挡另一个所述端口,且所述端盖与该端口之间设置有第四密封圈,所述第二轴穿设于所述第二室当中,所述第二轴的一端与所述驱动件相连,另一端朝向所述端盖的位置延伸,所述第二部件嵌套设置在所述第二轴上,所述第二部件与所述第二轴之间键连接。
12、本申请另一个方面的技术方案提出了一种并联机器人,包括:静平台、传动臂机构、上述任一技术方案中所述的动平台结构,所述传动臂机构连接所述静平台与所述动平台结构的动平台。
13、本申请中,第一轴为中空结构,且穿设于动平台的第一口、基座内的容纳室以及基座上的第二口中,传动机构设置在容纳室内且传动机构的输出端与第一轴连接,驱动件与传动机构的输入端相连,这样,既实现了传动机构与动平台及基座之间的紧凑布置,且管路和/或电线可穿过第一轴的内部中空区域进行走管或走线,走管、走线更方便。
14、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:
1.一种动平台结构,其特征在于,包括:
2.根据权利要求1所述的动平台结构,其特征在于,
3.根据权利要求2所述的动平台结构,其特征在于,
4.根据权利要求2或3所述的动平台结构,其特征在于,
5.根据权利要求1至3中任一项所述的动平台结构,其特征在于,还包括若干防尘圈及若干第一密封圈;
6.根据权利要求5所述的动平台结构,其特征在于,
7.根据权利要求5所述的动平台结构,其特征在于,
8.根据权利要求1至3中任一项所述的动平台结构,其特征在于,
9.根据权利要求2或3所述的动平台结构,其特征在于,
10.一种并联机器人,其特征在于,包括:
技术总结
本申请提出了一种动平台结构和并联机器人,动平台结构包括:动平台,动平台设置有第一口;基座,与动平台相连,基座设置有第二口,且基座内形成有容纳室;第一轴,穿设在第一口、容纳室、第二口中,第一轴与动平台和基座中的至少一者转动连接,第一轴的内部中空,第一轴的两端分别设置有与第一轴的内部连通的开口;传动机构,容纳在容纳室中,传动机构的输出端与第一轴相连;驱动件,设在基座上,与传动机构的输入端相连。本动平台结构,传动机构与动平台及基座之间的紧凑布置,且走管、走线更方便。
技术研发人员:康利华
受保护的技术使用者:库卡机器人(广东)有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!