一种新型智能制造机械手的制作方法
1.本发明属于制造机械手技术领域,具体涉及一种新型智能制造机械手。
背景技术:
2.智能制造是一种由智能机器和人类专家共同组成的人机一体化智能系统,它在制造过程中能进行智能活动,诸如分析、推理、判断、构思和决策等,在进行智能制造过程中,需要用到机械手进行作业。
3.公开号为cn215848247u的本实用新型提供了一种智能制造机械手,包括电机箱以及设置在其下方的夹持组件,电机箱下端转动连接有转台,转台下端中部活动连接有传动杆,转台下端左右两侧均活动连接有油缸一。通过左右两个油缸一的配合,可使传动杆左右倾斜,而通过减速电机驱动转台转动,可使传动杆进行旋转,这样传动杆不仅可以带动油缸二左右倾斜,而且还可带动油缸二旋转,另外通过蜗杆与蜗轮的配合,还可进行调节油缸二自身的倾斜角度,并且通过油缸二驱动夹持盘上下移动,就可进行下移夹持工件,这样机械手的自由度较高,更加利于抓取工件,以解决目前在使用机械手进行抓取工件的过程中,机械手的自由度较低,导致不利于进行抓取工件的问题。
4.人们目前在使用机械手进行抓取工件的过程中,由于一些工件形状特殊,单纯的双面或四面夹具对工件的禁锢性能交叉,会导致工件在装夹过程中的松动,且机械手一般通过轨道传动,安装结构较为复杂,且自由度不高,不利于进行抓取工件。
技术实现要素:
5.本发明的目的在于提供一种新型智能制造机械手,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:固定顶块,所述固定顶块的一侧对称设置有移动装置,对称所述移动装置相互靠近的一侧设置有连接装置,所述连接装置远离所述移动装置的一端设置有支座,所述支座的一侧固定连接有固定柱,所述固定柱远离所述固定顶块的一端设置有爪夹装置,所述爪夹装置的内部设置有支撑装置,所述爪夹装置的表面设置有压紧装置,通过多组支爪增加了与工件的接触面积,通过套环和第二支撑桩可增加支爪的开合效率,移动装置通过连接装置带动支座的移动,支座通过爪夹装置对工件进行移动。
7.作为本发明一种优选的,所述移动装置包括与所述固定顶块固定连接的固定轨,对称所述固定轨的表面固定连接有固定板,所述固定板的一侧固定连接有电机,所述电机的输出端固定连接有传动轴,所述传动轴的一端贯穿所述固定板螺纹连接有升降板,所述升降板的内部与所述固定轨滑动插接。
8.作为本发明一种优选的,所述连接装置包括与所述升降板和所述支座一侧的固定组件,对称所述固定组件的中部设置有连接杆,所述固定组件包括与所述支座固定连接的固定块,所述固定块的一侧插接有转轴,所述转轴远离所述固定块的一侧贴合抵接有压板,
所述压板与所述固定块固定连接,所述固定块的两端与所述连接杆铰接。
9.作为本发明一种优选的,所述爪夹装置包括与所述固定柱铰接的支爪,所述支爪设置有数个,所述支爪的内侧面开设有避让槽,所述避让槽的内部两侧固定连接有限位柱,且避让槽的内部滑动设置有调节板,所述调节板的两侧开设置有限位槽,所述限位槽与限位柱之间滑动设置,所述调节板的内侧设置有第一支撑桩。
10.作为本发明一种优选的,所述第一支撑桩包括与所述支爪内壁固定连接的套管,所述套管的内部滑动连接有支柱,所述套管的内部设置有弹簧柱,所述弹簧柱的一端与所述支柱抵接;所述调节板的侧面开设有气孔接头,所述调节板内开设有气孔,所述气孔呈t字形,所述气孔的两侧分别贯穿调节板的内侧和外侧,所述气孔接头上外接有吸气泵,所述调节板上开设有弧形槽,所述气孔的一端与弧形槽连通,所述第一支撑桩位于气孔另一端的对立面;所述支柱的形状为t形,所述支柱的一端可以插接在气孔内,实现对气孔一段进行封堵。
11.作为本发明一种优选的,所述支撑装置包括位于所述固定柱的一端中心处的支撑盘,所述支撑盘的四周固定连接有支撑卡块,所述支撑卡块的数量与所述支爪保持一致,所述支撑卡块的一侧设置有第二支撑桩,所述第二支撑桩远离所述卡块的一端与所述支爪抵接,所述第二支撑桩的结构与所述第一支撑桩结构一致。
12.作为本发明一种优选的,所述压紧装置包括与所述支座固定连接的液压机,所述液压机输出端固定连接有顶板,所述顶板的一端对称固定连接有连接柱,所述连接柱的一端贯穿所述支座固定连接有套环,所述支爪的外壁固定连接有限位环,所述限位环的内壁与所述限位环相互抵接。
13.作为本发明一种优选的,所述套环的内径大于所述固定柱的直径,所述连接柱环绕于所述固定柱的四周。
14.本发明的有益效果:1、固定顶块固定于流水线顶部工作台或轨道上,减少对工厂内地面的占用,增加空间利用率,移动装置由三组电机控制,通过对升降板高度的调整,可通过连接装置对支座的位置进行调整,使支座夹取过程中的移动,液压机通过顶板控制连接柱的升降,连接柱贯穿支座增加了套环的稳定性,套环对限位环进行挤压,使支爪向内收缩,支爪在向内移动过程中对第二支撑桩进行挤压,使第二支撑桩收缩,第二支撑桩对支爪进行支撑,使支爪位于开合状态,这样的设计通过多组支爪增加了与工件的接触面积,通过套环和第二支撑桩可增加支爪的开合效率,移动装置通过连接装置带动支座的移动,支座通过爪夹装置对工件进行移动。
15.2、移动装置包括与固定顶块固定连接的固定轨,固定轨对称插接于固定顶块的一侧,对称固定轨的表面固定连接有固定板,固定板的一侧固定连接有电机,固定板对电机进行固定,电机的输出端固定连接有传动轴,传动轴的一端贯穿固定板螺纹连接有升降板,升降板的内部与固定轨滑动插接,电机转动通过传动轴与升降板的螺纹连接,使升降板位于对称的固定轨表面滑动,对称固定轨增加固定轨的稳定性,移动装置由三组电机控制,通过对升降板高度的调整,可通过连接装置对支座的位置进行调整。
16.3、压紧装置包括与支座固定连接的液压机,液压机输出端固定连接有顶板,顶板的一端对称固定连接有连接柱,连接柱的一端贯穿支座固定连接有套环,支爪的外壁固定连接有限位环,限位环的内壁与限位环相互抵接,支座对压紧装置进行固定,液压机通过顶板控制连接柱的升降,连接柱贯穿支座增加了套环的稳定性,套环对限位环进行挤压,使支爪向内收缩,对工件进行夹合,套环的内径大于固定柱的直径,套环位于固定柱的表面滑动,连接柱环绕于固定柱的四周。
附图说明
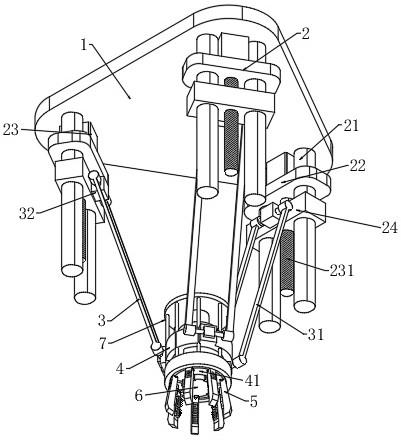
17.图1为本发明的结构示意图;图2为本发明的压紧装置侧面结构示意图;图3为本发明的支撑装置结构示意图;图4为本发明的固定组件结构示意图;图5为本发明的支爪结构剖视示意图;图6为本发明的第一支撑桩结构剖视示意图;图7为本发明的调节板结构剖视示意图。
18.图中:1、固定顶块;2、移动装置;21、固定轨;22、固定板;23、电机;231、传动轴;24、升降板;3、连接装置;31、连接杆;32、固定组件;321、固定块;322、压板;323、转轴;4、支座;41、固定柱;5、爪夹装置;51、支爪;511、限位环;52、限位柱;53、调节板;531、气孔接头;532、气孔;533、弧形槽;54、第一支撑桩;541、套管;542、弹簧柱;543、支柱;55、避让槽;56、限位槽;6、支撑装置;61、支撑盘;62、支撑卡块;63、第二支撑桩;7、压紧装置;71、液压机;72、顶板;73、连接柱;74、套环。
具体实施方式实施例
19.请参阅附图1、图2和图3,一种新型智能制造机械手,包括:固定顶块1,固定顶块1固定于流水线顶部工作台或轨道上,减少对工厂内地面的占用,增加空间利用率,固定顶块1的一侧对称设置有移动装置2,对称移动装置2相互靠近的一侧设置有连接装置3,连接装置3远离移动装置2的一端设置有支座4,移动装置2通过连接装置3将支座4进行固定,移动装置2包括与固定顶块1固定连接的固定轨21,固定轨21对称插接于固定顶块1的一侧,固定轨21对称安装有三组,对称固定轨21的表面固定连接有固定板22,固定板22与固定顶块1均处于水平状态,固定板22的一侧固定连接有电机23,电机23位于固定板22靠近固定顶块1的一侧,固定板22对电机23进行固定。
20.具体的,请参阅附图1、图2和图3,电机23的输出端固定连接有传动轴231,传动轴231的一端贯穿固定板22螺纹连接有升降板24,传动轴231与固定板22的连接处设置有轴承,减少固定板22对传动轴231的摩擦,传动轴231转动过程中通过与升降板24的螺纹连接,使升降板24上下升降,升降板24的内部与固定轨21滑动插接,电机23转动通过传动轴231与升降板24螺纹连接,采用传动轴231的方式连接,可以提高下方支座4的稳定性,使升降板24位于对称的固定轨21表面滑动,对称固定轨21增加固定轨21的稳定性,移动装置2由三组电
机23控制,通过对升降板24高度的调整,可通过连接装置3对支座4的位置进行调整。
21.具体的,请参阅附图1、图3和图4,连接装置3包括与升降板24和支座4一侧的固定组件32,固定组件32分别与升降板24和升降板24固定,对称固定组件32的中部设置有连接杆31,固定组件32包括与支座4固定连接的固定块321,固定块321的一侧插接有转轴323,转轴323远离固定块321的一侧贴合抵接有压板322,固定块321和压板322的一侧均开设有半圆槽,转轴323位于半圆槽的内部转动,转轴323的两端固定连接有堵头,压板322与固定块321固定连接。
22.具体的,请参阅附图1、图3和图4,压板322的四周通过螺栓对固定块321进行固定,转轴323的两端通过堵头与连接杆31铰接,堵头限制了转轴323的移动,增加转轴323位于与固定块321一侧旋转的稳定性,转轴323通过两端堵头与连接杆31的铰接,使转轴323在旋转过程中转轴323可与转轴323横向摆动,连接杆31与转轴323两端的铰接,增加了连接装置3的灵活性,连接杆31通过两端连接杆31使升降板24与支座4连接,其中一组电机23通过传动轴231带动升降板24升降,其余两组升降板24不动,升降板24会通过升降板24推动支座4朝相反的方向移动,通过控制三组升降板24的高度,对支座4的位置进行调整,增加了支座4局部范围内活动的灵活性。
23.具体的,请参阅附图4、图5和图6,支座4的一侧固定连接有固定柱41,固定柱41远离固定顶块1的一端设置有爪夹装置5,爪夹装置5包括与固定柱41铰接的支爪51,支爪51设置有数个,支爪51垂直于固定柱41远离支座4的一端摆动,支爪51环绕于固定柱41的四周,通过支爪51四周向内收缩可对工件进行夹紧,支爪51的内侧面开设有避让槽55,避让槽55的内部两侧固定连接有限位柱52,且避让槽55的内部滑动设置有调节板53,调节板53对称设置,调节板53的一侧设置有防滑槽,增加调节板53的摩擦力,调节板53高出支爪51的水平一侧,使调节板53凸起,调节板53的两侧开设置有限位槽56,限位槽56与限位柱52之间滑动设置,调节板53的内侧设置有第一支撑桩54,调节板53的两侧设置有弹簧,使调节板53更贴合工件的外形进行抵接,增加支爪51内壁与工件的贴合紧密度,第一支撑桩54对调节板53两侧进行支撑,增加调节板53的稳定性,使调节板53在不受力的情况下与支爪51的侧面保持水平状态,方便调节板53下次工作中与工件的抵接。
24.具体的,请参阅附图4、图5、图6和图7,第一支撑桩54包括与支爪51内壁固定连接的套管541,套管541的一端设置有出口,套管541的内部滑动连接有支柱543,套管541的内部设置有弹簧柱542,弹簧柱542的一端与支柱543抵接,弹簧柱542位于套管541的内部伸缩,弹簧柱542的表面设置有弹簧,弹簧的两端设置有固定垫,增加弹簧柱542两端与支柱543和套管541的连接稳定性,固定垫的内部插接有伸缩杆,伸缩杆采用金属带材或塑料片材卷制而成的可伸缩空心圆柱体杆,其特征是金属带材或塑料片材预先定型为具有记忆功能的小于杆体外径的弹力卷曲层,从而具有自紧功能,使卷曲层始终具有对伸缩杆施加压力的弹性势能,伸缩杆位于弹簧中心处,增加了弹簧的支持性能,套管541对支柱543进行限位,支柱543通过弹簧柱542支撑,使调节板53在不受力的过程中归位,第一支撑桩54增加了调节板53的稳定性。
25.调节板53的侧面开设有气孔接头531,调节板53内开设有气孔532,气孔532呈t字形,气孔532的两侧分别贯穿调节板53的内侧和外侧,气孔接头531上外接有吸气泵(图中未示出),调节板53上开设有弧形槽533,气孔532的一端与弧形槽533连通,第一支撑桩54位于
气孔532另一端的对立面;支柱543的形状为t形,支柱543的一端可以插接在气孔532内,实现对气孔532一段进行封堵。
26.在使用的过程中,调节板53与被夹紧的工件接触,如果施加的压力过大,则容易将工件夹坏,如果施力过小,则容易使工件掉落。
27.本技术通过设置的吸气泵可以通过管道与气孔接头531连接,实时对气孔532吸气,当工件夹紧的过程中调节板53被挤压,挤压的过程中,使调节板53一端的气孔532可以压入到支柱543内,支柱543可以将气孔532的一端堵住,由于调节板53的另一面与工件接触,可以对工件施加一个吸力,有效的防止工件的掉落;在工件夹紧被夹紧完成后,调节板53复位,气孔532从支柱543内脱落出来,此时,气孔532的两端呈开口状,也尽量避免调节板53的弧形槽533与工件接触面产生负压。
28.另外在机械手在长时间使用过程中,调节板53的一面容易产生粉尘碎末,而这个粉末,也会降低调节板53与工件接触面的摩擦阻力,设置的气孔532也可以将调节板53上的粉末吸进去,提高调节板53与工件接触面的摩擦阻力。
29.具体的,请参阅附图1、图3和图4,爪夹装置5的内部设置有支撑装置6,爪夹装置5的表面设置有压紧装置7,支撑装置6包括位于固定柱41的一端中心处的支撑盘61,支撑盘61为圆形,支撑盘61的一侧与固定柱41紧密贴合,支撑盘61的四周固定连接有支撑卡块62,支撑卡块62的数量与支爪51保持一致,支撑卡块62的一侧设置有第二支撑桩63,第二支撑桩63远离支撑卡块62的一端与支爪51抵接,第二支撑桩63的结构与第一支撑桩54结构一致,支撑盘61通过数量与支爪51一致的支撑卡块62对第二支撑桩63进行支撑,支爪51通过第二支撑桩63的支撑向外张开,支爪51在向内移动过程中对第二支撑桩63进行挤压,使第二支撑桩63收缩,第二支撑桩63对支爪51的支撑,使支爪51在不受外力的情况下处于开合状态,方便支爪51对工件的下一次夹紧。
30.具体的,请参阅附图1、图3和图4,压紧装置7包括与支座4固定连接的液压机71,液压机71输出端固定连接有顶板72,顶板72的一端对称固定连接有连接柱73,连接柱73的一端贯穿支座4固定连接有套环74,支爪51的外壁固定连接有限位环511,限位环511的内壁与限位环511相互抵接,支座4对压紧装置7进行固定,液压机71通过顶板72控制连接柱73的升降,连接柱73贯穿支座4增加了套环74的稳定性,套环74对限位环511进行挤压,使支爪51向内收缩,对工件进行夹合,套环74的内径大于固定柱41的直径,套环74位于固定柱41的表面滑动,连接柱73环绕于固定柱41的四周。
31.工作原理:使用时,将固定顶块1固定于流水线顶部工作台或轨道上,减少对工厂内地面的占用,增加空间利用率,移动装置2由三组电机23控制,通过对升降板24高度的调整,可通过连接装置3对支座4的位置进行调整,使支座4夹取过程中的移动,液压机71通过顶板72控制连接柱73的升降,连接柱73贯穿支座4增加了套环74的稳定性,套环74对限位环511进行挤压,使支爪51向内收缩,支爪51在向内移动过程中对第二支撑桩63进行挤压,使第二支撑桩63收缩,第二支撑桩63对支爪51进行支撑,使支爪51位于开合状态,这样的设计通过多组支爪51增加了与工件的接触面积,通过套环74和第二支撑桩63可增加支爪51的开合效率,移动装置2通过连接装置3带动支座4的移动,支座4通过爪夹装置5对工件进行移动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1