驱动装置及具有该驱动装置的机器人的制作方法
本申请涉及电机,具体是涉及一种驱动装置及具有该驱动装置的机器人。
背景技术:
1、随着电机技术的不断发展和普及,多数设备中均会装载有电机,从而利用电机提供驱动力,以实现机械部件的运动,如升降、旋转以及振动等等,使得设备可以实现相应的功能。然而,现有电机的传动精度不高,无法精准控制电机输入输出的位置,降低了电机的可控性,因此,如何提升电机的传动精度,已经成为了业内人员的主要关注对象。
技术实现思路
1、本申请实施例一方面提供了一种驱动装置,所述驱动装置包括动力机构、第一减速机构、第二减速机构以及检测机构,所述动力机构被配置为用于形成所述驱动装置的输入端;所述第一减速机构具有第一输入端、第一输出端、第一减速比;所述第二减速机构具有第二输入端、第二输出端、第二减速比;所述检测机构具有第一检测组件以及第二检测组件;其中,所述第一减速比大于所述第二减速比,所述动力机构分别与所述第一输入端和所述第二输入端连接,以使得所述第一输入端和所述第二输入端能够发生同步转动;
2、所述第一检测组件部分设于所述第一输入端,并被配置为用于检测所述动力机构的运动信息;所述第二检测组件部分设于所述第一输出端,并被配置为用于检测所述第二输出端的运动信息;所述第二输出端被配置为用于形成所述驱动装置的输出端。
3、本申请实施例另一方面还提供了一种机器人,所述机器人包括上述的驱动装置。
4、本申请实施例提供的驱动装置及具有该驱动装置的机器人,通过设置第一减速机构的第一减速比大于第二减速机构的第二减速比,在第一减速机构的第一输入端和第二减速机构的第二输入端同步转动时,第一减速机构的第一输出端的转动角度小于第二减速机构的第二输出端的转动角度。进一步通过第一检测组件检测第一输入端的运动信息可以获取到动力机构的运动信息,以及通过第二检测组件检测第一输出端的运动信息并通过第一减速比和第二减速比之间的对应关系来获得第二输出端的运动信息,进而获取驱动装置的输入端和输出端的运动信息,从而可以通过比对驱动装置的输入端和输出端的运动信息,实现对驱动装置进行更为精准的控制,提升了驱动装置的传动精度和可控性。
技术特征:
1.一种驱动装置,其特征在于,所述驱动装置包括:
2.根据权利要求1所述的驱动装置,其特征在于,所述第一输出端旋转1周时,所述第一输入端旋转了m周,所述第二输出端旋转了n周;其中,m>n>1,所述第二输出端的转动角度的量程为0~n*360°。
3.根据权利要求1所述的驱动装置,其特征在于,所述第一检测组件包括设于所述第一输入端上的第一被检测件、以及与所述第一被检测件相对设置的第一检测件,所述第一检测件被配置为可通过所述第一被检测件获取所述动力机构的运动信息;
4.根据权利要求3所述的驱动装置,其特征在于,所述第二检测组件为单圈绝对值编码器。
5.根据权利要求3所述的驱动装置,其特征在于,所述第一减速机构与所述动力机构连接,并被配置为与所述动力机构相联动;所述第一减速机构包括主动件和从动件,所述主动件被配置为用于形成所述第一输入端,并与所述动力机构连接以及用于装配所述第一被检测件;所述从动件被配置为用于形成所述第一输出端,并用于装配所述第二被检测件;其中,所述第一减速比为所述主动件与所述从动件的转速的比值。
6.根据权利要求5所述的驱动装置,其特征在于,所述第一减速机构为谐波减速器。
7.根据权利要求5所述的驱动装置,其特征在于,所述驱动装置包括与所述第一减速机构间隔设置的电路板,所述第一检测件设于所述电路板上并与所述第一被检测件相对设置,所述第二检测件设于所述电路板上并与所述第二被检测件相对设置。
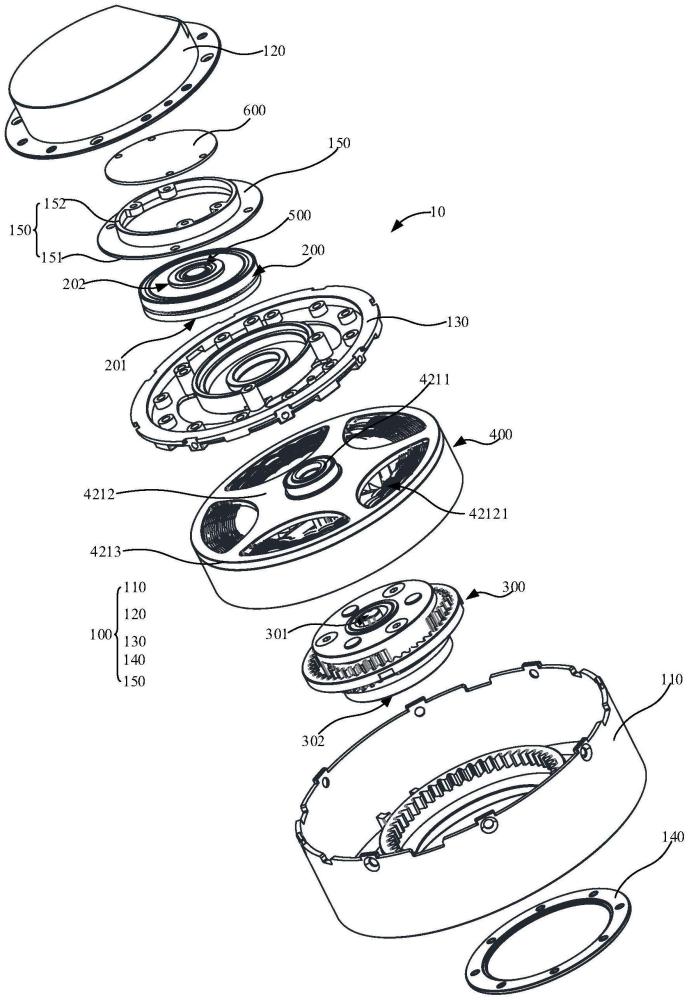
8.根据权利要求7所述的驱动装置,其特征在于,所述驱动装置包括壳体组件,所述壳体组件具有第一容置腔和第二容置腔,所述第一容置腔被配置为用于容纳所述第二减速机构、所述动力机构,所述第二容置腔被配置为用于容纳所述第一减速机构、所述检测机构、所述电路板。
9.根据权利要求8所述的驱动装置,其特征在于,所述壳体组件包括相对设置的第一端盖和第二端盖、以及设于所述第一端盖和所述第二端盖之间的承载件,所述第一端盖与所述承载件配合围设形成所述第一容置腔,所述第二端盖与所述承载件配合围设形成所述第二容置腔。
10.根据权利要求9所述的驱动装置,其特征在于,所述动力机构包括与所述承载件转动连接的转子组件,所述转子组件被配置为用于带动所述主动件和所述第二输入端进行同步转动。
11.根据权利要求10所述的驱动装置,其特征在于,所述承载件包括第一承载部和第二承载部,所述第一承载部设于所述第一端盖和所述第二端盖之间并分别连接所述第一端盖和所述第二端盖,所述第二承载部设于所述第二容置腔内并被配置为用于装配所述第一减速机构。
12.根据权利要求11所述的驱动装置,其特征在于,所述第二承载部包括承载板、以及设于所述承载板背离所述第一端盖的一侧的第一围壁和第二围壁,所述承载板设有装配孔,所述第一围壁设置于所述承载板的外环沿,所述第二围壁设置于所述承载板的内环沿;所述转子组件的一端插设于所述装配孔并通过轴承与所述承载板转动装配。
13.根据权利要求12所述的驱动装置,其特征在于,所述第一围壁凸出于所述承载板的高度大于所述第二围壁凸出于承载板的高度。
14.根据权利要求12所述的驱动装置,其特征在于,所述第一减速机构还包括装配于所述第一围壁上的固定件,所述固定件环设于所述从动件的外围,所述从动件环绕于所述主动件的外围,所述主动件转动时作用于所述从动件使得所述从动件转动;
15.根据权利要求11所述的驱动装置,其特征在于,所述壳体组件还包括装配于所述第二容置腔内的支撑件,所述承载件包括连接所述第一承载部和所述第二承载部的连接部,所述第一承载部呈环形并环绕于所述第二承载部的外围,所述连接部设于所述第一承载部和所述第二承载部之间;所述支撑件与所述连接部装配连接并用于装配所述电路板;其中,所述支撑件和所述第二承载部间隔设置。
16.根据权利要求15所述的驱动装置,其特征在于,所述支撑件和所述第二端盖之间具有间隙。
17.根据权利要求15所述的驱动装置,其特征在于,所述支撑件包括第一支撑部和第二支撑部,所述第一支撑部用于与所述连接部装配连接,所述第二支撑部用于装配所述电路板;其中,所述第二支撑部通过轴承与所述从动件转动连接。
18.根据权利要求17所述的驱动装置,其特征在于,所述从动件包括具有外齿的第一从动部、以及通过轴承与所述第二支撑部转动装配的第二从动部,所述第一从动部的外齿用于与所述固定件的内齿啮合;其中,所述第一从动部和所述主动件之间设有柔性轴承,所述第二从动部靠近所述电路板的一侧设有所述第二被检测件。
19.根据权利要求12所述的驱动装置,其特征在于,所述主动件包括主体部、以及设于所述主体部相对两侧的第一凸部和第二凸部,所述主体部作用于所述从动件以使得所述从动件转动,所述第一凸部设于所述主体部靠近所述电路板的一侧并被配置为用于装配所述第一被检测件,所述第二凸部设于所述主体部背离所述电路板的一侧并被配置为用于与所述转子组件连接。
20.根据权利要求12所述的驱动装置,其特征在于,所述转子组件包括转动架、设于所述转动架上的固定板、以及设于所述固定板上的永磁体,所述转动架设于所述承载件背离所述第二端盖的一侧,且所述转动架分别与所述主动件和所述第二输入端连接,以用于带动所述主动件和所述第二输入端进行同步转动。
21.根据权利要求20所述的驱动装置,其特征在于,所述动力机构还包括定子组件,所述定子组件与所述电路板电性连接并被配置为在通电后产生磁力驱动所述转子组件转动,进而通过所述转动架带动所述主动件和所述第二输入端进行同步转动。
22.根据权利要求20所述的驱动装置,其特征在于,所述第二减速机构包括传动组件和行星架,所述传动组件与所述动力机构连接并被配置为与所述动力机构相联动,所述行星架与所述传动组件连接并可在所述传动组件的带动下进行转动;其中,所述传动组件被配置为用于形成所述第二输入端,所述行星架被配置为用于形成所述第二输出端。
23.根据权利要求22所述的驱动装置,其特征在于,所述传动组件包括主齿轮、内齿轮以及双联齿轮,所述主齿轮与所述转动架连接并可在所述转动架的带动下转动,所述内齿轮围绕所述主齿轮设置,所述双联齿轮分别与所述主齿轮和所述内齿轮啮合,并连接所述行星架;其中,所述内齿轮固定装配于所述第一端盖。
24.根据权利要求23所述的驱动装置,其特征在于,所述行星架包括第一行星架、第二行星架、转轴以及固定件,所述第一行星架和所述第二行星架间隔且相对设置,所述转轴和所述固定件设于所述第一行星架和所述第二行星架之间;其中,所述双联齿轮通过所述转轴带动所述第一行星架和所述第二行星架进行同步转动,所述固定件用于锁紧固定所述第一行星架和所述第二行星架。
25.根据权利要求22所述的驱动装置,其特征在于,所述第二减速机构为行星减速器。
26.一种机器人,其特征在于,所述机器人具有权利要求1-25任意一项所述的驱动装置。
技术总结
本申请涉及一种驱动装置及具有该驱动装置的机器人,驱动装置包括动力机构、第一减速机构、第二减速机构、检测机构,动力机构用于形成驱动装置的输入端;第一减速机构具有第一输入端、第一输出端、第一减速比;第二减速机构具有第二输入端、第二输出端、第二减速比;检测机构具有第一检测组件、第二检测组件;第一减速比大于第二减速比,动力机构分别与第一输入端和第二输入端连接以使第一输入端和第二输入端同步转动;第一检测组件用于检测动力机构的运动信息;第二检测组件用于检测第二输出端的运动信息。本申请实施例提供的驱动装置及具有驱动装置的机器人,通过比对驱动装置的输入端和输出端的运动信息,对驱动装置进行更为精准的控制。
技术研发人员:王伟祥
受保护的技术使用者:OPPO广东移动通信有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!