一种高压电站维护的移动机器人
1.本发明涉及高压电站维护技术领域,具体的讲是一种高压电站维护的移动机器人。
背景技术:
2.高压变电站是电网的重要组成部分,“高压变电站”一般是指220kv至 35kv电压等级的变电站。在城市电网中,高压变电站采用敞开式变电站布置形式的比较少;采用半户内式、户内式变电站比较常见;在对安装在高处的高压变电箱进行检修维护时,往往需要维修人员携带大量的检修工具并移动到高处进行检查或维修,在进行维护过程中,具有以下问题:
3.1、面对安装于高出的高压变电站,需要维修人员先上去检查,无法提前对设备情况进行查看,无法针对性地携带维修用具;
4.2、大量的工具不可避免地增加了维修人员的负重,使得其行动不够便捷,且人工劳动强度大。
技术实现要素:
5.本发明要解决的技术问题是针对以上不足,提供一种高压电站维护的移动机器人,本发明能够通过提前观察高压电箱的情况,便于后续制定维护方案,提高维护效率,能够向高处运输维护工具或需要更换的器件,减少维修人员的负担。
6.为解决以上技术问题,本发明采用以下技术方案:
7.一种高压电站维护的移动机器人,包括底座、架体、机械手和升降机构,所述底座外侧设置有若干行走轮,所述底座的顶部后端设置有连接架;
8.所述架体竖直设置于底座的顶部,所述升降机构设置于架体上,所述机械手设置于升降机构的升降端上,所述升降机构用于带动机械手沿架体上升或下降,所述机械手的手臂前端设置有手爪组件,所述机械手用于带动手爪组件在有限空间内移动,所述手爪组件用于拍摄画面或夹取物品。
9.进一步的,所述升降机构包括导轨、第一安装板和同步带传动机构,所述架体前端左右两侧均设置有导轨,所述第一安装板竖直设置于导轨上的滑块上,所述机械手设置于第一安装板的前端,所述同步带传动机构竖直设置于架体上,所述第一安装板与同步带传动机构连接,所述同步带传动机构用于带动第一安装板沿导轨上升或下降。
10.进一步的,所述同步带传动机构包括第一转轴、第二转轴、第一同步带轮、第二同步带轮和伺服电机,所述第一转轴水平设置于架体的顶部,所述第二转轴水平设置于架体的底部,且第一转轴和第二转轴的轴线在同一竖直平面内,所述第一转轴的左右两侧均设置有一个第一同步带轮,所述第二转轴的左右两侧均设置有一个第二同步带轮,位于同侧的第一同步带轮位于第二同步带轮的正上方且同侧的第一同步带轮和第二同步带轮通过同步带连接,所述伺服电机与第二转轴连接;
11.所述第一安装板与同步带连接,所述伺服电机用于驱动同步带转动以带动第一安装板上升或下降。
12.进一步的,所述同步带的外侧设置有固定块,所述固定块的前端水平设置有圆柱凸起;
13.所述第一安装板的后端设置有连接板,所述连接板的两侧均设置有连接机构,所述连接机构包括固定座、连接杆和连接套筒,所述固定座设置于连接板底部,所述连接杆的一端铰接于固定座上且可绕自身轴线旋转,连接杆的另一端设置有连接套筒,所述连接套筒的轴线与连接杆的轴线相互垂直,所述连接套筒套设于圆柱凸起的外侧,所述圆柱凸起的长度大于连接套筒的长度,所述圆柱凸起远离固定块的一端设置有限位块。
14.进一步的,所述导轨上位于第一安装板的下方设置有储物箱,所述储物箱设置于导轨上且可沿导轨上升或下降,所述储物箱的上表面敞开,所述储物箱与第一安装板可拆卸连接。
15.进一步的,所述第一安装板的后端底部设置有挂钩;
16.所述储物箱的后端设置有挂板,所述挂板的底端铰接于储物箱的后端且可在竖直平面内旋转,所述挂板的顶端开设有与挂钩配合的腰形孔。
17.进一步的,所述手爪包括第二安装板、摄像机和夹持缸,所述第二安装板的左右两侧设置有相互对称的第一延伸部,所述第一延伸部远离第二安装板的一端均设置有一个夹持缸,所述夹持缸的底部设置有两个相互对称的夹具,所述夹持缸用于带动两个夹具在竖直平面内旋转,以使两个夹具相互靠近或远离,所述第二安装板的中部设置有第二延伸部,所述摄像机设置于第二延伸部远离第二安装板的一端。
18.进一步的,两个夹持缸分别用于带动两个夹具在不同且相互平行的两个竖直面内旋转。
19.进一步的,所述摄像机为工业3d摄像机。
20.本发明采用以上技术方案后,与现有技术相比,具有以下优点:
21.本发明通过升降机构可带动机械手上升或下降,通过机械手前端的手爪可提前拍摄高压电箱的情况,再通过无线或有线传输给地面的电脑终端上,并可使作业人员提前连接高压电箱的情况,方便提前研究维修方案并准备维修工具,提高了维护效率;
22.本发明在进行维护时,可通过机械手和手爪的配合,来抓取维修工具或损坏的器件,并通过升降机构带动机械手沿架体上升传输给作业人,减少作业人员的付重,或通过升降机构带动机械手沿架体下降以将损坏的器件运输至底面,对损坏的器件进行回收,大大提高了维护效率;
23.本发明的第一安装板下方可拆卸连接有储物箱,便于向高处运送机械手无法抓取或质量较重的物品;
24.在安装板进行升降时,同步带会发生一些摆动或震动,通过连接套筒和圆柱凸起的配合,能够消除或缓解同步带的横向摆动或震动,减少同步带66 摆动或震动对安装板的影响,提高安装板移动的稳定性
25.下面结合附图和实施例对本发明进行详细说明。
附图说明
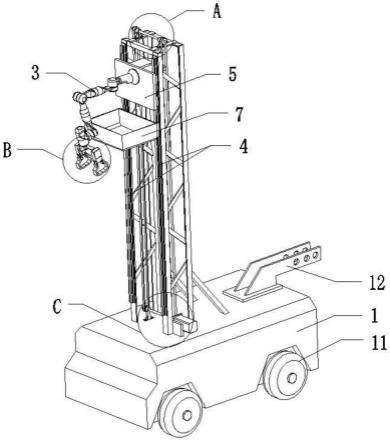
26.图1为本发明的左视图;
27.图2为本发明第一视角的立体结构示意图;
28.图3为图2的a处放大图;
29.图4为图2的b处放大图;
30.图5为图2的c处放大图;
31.图6为本发明第二视角的立体结构示意图;
32.图7为图6的d处放大图;
33.图8为本发明第三视角的立体结构示意图;
34.图9为图8的e处放大图。
35.附图中,各标号所代表的部件列表如下:
36.1、底座;11、行走轮;12、连接架;2、架体;3、机械手;4、导轨; 5、第一安装板;51、连接板;521、固定座;522、连接杆;523、连接套筒; 53、挂钩;61、第一转轴;62、第二转轴;63、第一同步带轮;64、第二同步带轮;65、伺服电机;66、同步带;661、固定块;662、圆柱凸起;663、限位块;7、储物箱;71、挂板;711、腰形孔;81、第二安装板;811、第一延伸部;812、第二延伸部;82、摄像机;83、夹持缸;831、夹具。
具体实施方式
37.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
38.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”“顺时针”“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
39.如图1、图2、图6和图6所示,一种高压电站维护的移动机器人,包括底座1、架体2、机械手3和升降机构,所述底座1外侧设置有若干行走轮11,所述底座1的顶部后端设置有连接架12;
40.所述架体2竖直设置于底座1的顶部,所述升降机构设置于架体2上,所述机械手3设置于升降机构的升降端上,所述升降机构用于带动机械手3沿架体2 上升或下降,所述机械手3的手臂前端设置有手爪组件,所述机械手3用于带动手爪组件在有限空间内移动,所述手爪组件用于拍摄画面或夹取物品。
41.作为一种实施方式,所述升降机构包括导轨4、第一安装板5和同步带传动机构,所述架体2前端左右两侧均设置有导轨4,所述第一安装板5竖直设置于导轨4上的滑块上,所述机械手3设置于第一安装板5的前端,所述同步带传动机构竖直设置于架体2上,所述第一安装板5与同步带传动机构连接,所述同步带传动机构用于带动第一安装板5沿导轨4上升或下降。
42.如图3和图5所示,作为一种实施方式,所述同步带传动机构包括第一转轴61、第二转轴62、第一同步带轮63、第二同步带轮64和伺服电机65,所述第一转轴61水平设置于架体2的顶部,所述第二转轴62水平设置于架体2的底部,且第一转轴61和第二转轴62的轴线在
同一竖直平面内,所述第一转轴61 的左右两侧均设置有一个第一同步带轮63,所述第二转轴62的左右两侧均设置有一个第二同步带轮64,位于同侧的第一同步带轮63位于第二同步带轮64 的正上方且同侧的第一同步带轮63和第二同步带轮64通过同步带66连接,所述伺服电机65与第二转轴62连接;
43.所述第一安装板5与同步带66连接,所述伺服电机65用于驱动同步带66 转动以带动第一安装板5上升或下降。
44.作为一种实施方式,所述同步带66的外侧设置有固定块661,所述固定块661的前端水平设置有圆柱凸起662;
45.如图7和图9所示,所述第一安装板5的后端设置有连接板51,所述连接板51的两侧均设置有连接机构,所述连接机构包括固定座521、连接杆522和连接套筒523,所述固定座521设置于连接板51底部,所述连接杆522的一端铰接于固定座521上且可绕自身轴线旋转,连接杆522的另一端设置有连接套筒523,所述连接套筒523的轴线与连接杆522的轴线相互垂直,所述连接套筒523套设于圆柱凸起662的外侧,所述圆柱凸起662的长度大于连接套筒523 的长度,所述圆柱凸起662远离固定块661的一端设置有限位块663;
46.在安装板5进行升降时,同步带66会发生一些摆动或震动,通过连接套筒523和圆柱凸起662的配合,能够消除或缓解同步带66的横向摆动或震动,减少同步带66摆动或震动对安装板5的影响,提高安装板5移动的稳定性。
47.作为一种实施方式,所述导轨4上位于第一安装板5的下方设置有储物箱7,所述储物箱7设置于导轨4上且可沿导轨4上升或下降,所述储物箱7的上表面敞开,所述储物箱7与第一安装板5可拆卸连接。
48.作为一种实施方式,所述第一安装板5的后端底部设置有挂钩53;
49.如图7所示,所述储物箱7的后端设置有挂板71,所述挂板71的底端铰接于储物箱7的后端且可在竖直平面内旋转,所述挂板71的顶端开设有与挂钩 53配合的腰形孔711。
50.如图4所示,作为一种实施方式,所述手爪包括第二安装板81、摄像机 82和夹持缸83,所述第二安装板81的左右两侧设置有相互对称的第一延伸部 811,所述第一延伸部811远离第二安装板81的一端均设置有一个夹持缸83,所述夹持缸83的底部设置有两个相互对称的夹具831,所述夹持缸83用于带动两个夹具831在竖直平面内旋转,以使两个夹具831相互靠近或远离,所述第二安装板81的中部设置有第二延伸部812,所述摄像机82设置于第二延伸部812远离第二安装板81的一端。
51.作为一种实施方式,两个夹持缸83分别用于带动两个夹具831在不同且相互平行的两个竖直面内旋转,便于夹持长条形的工具或器件。
52.作为一种实施方式,所述摄像机82为工业3d摄像机,例如 camera(omron)20141209。
53.作为一种实施方式,行走轮11为能够自锁的轮子,行走轮11的数量包括多个(至少大于3),多个行走轮11均匀分布于底座1外侧,在本实施例中,行走轮11的数量为4个,且位于底座1前侧的两个行走轮11具有转向功能,所有行走轮11均具有自锁功能,使得底座1移动至目的位置后,能将行走轮11 锁住,以将底座1固定,便于完成后续维护作业。
54.在使用时,可将摄像机82、伺服电机65、机械手3和夹持缸83与电脑终端连接,通过电脑终端来控制摄像机82、伺服电机65、机械手3和夹持缸83,并可将摄像机82的拍摄画面
传输给电脑终端,便于作业人员观察和分析。
55.本发明的工作原理:
56.在进行维护时,通过连接架12将底座外接移动设备,通过移动设备拉动底座1移动至待维护的高压电站底部;
57.需要观察高压电箱的情况或向高压电箱旁的作业人员运输维修工具时,可通过夹持缸83推动两个夹具831旋转以相互靠近,来夹持住维修工具,通过伺服电机65驱动第二转轴62和第二同步带轮64旋转,以驱动同步带66转动,同步带66转动过程中,通过固定块661推动连接板51和第一安装板5沿导轨4上升,以带动机械手3沿导轨4上升以靠近高压电箱,直至带动机械手3移动至高压电箱旁;机械手3可带动摄像机82在有限的空间内移动,以使摄像机82朝向高压电箱,通过摄像机82可对高压电箱的情况进行查看,并可通过无线活有线的连接方式,将摄像机82与地面的电脑终端连接,以将摄像头82的拍摄画面传输至电脑终端上,便于作业人员观察高压电箱的情况;通过机械手3带动维修工具在有限的空间内移动以靠近作业人员,夹持缸83推动两个夹具831旋转以相互远离,以释放维修工具,将维修工具释放于安装高压电箱的平台上或作业人员的手中,使得作业人员能够取到维修工具;
58.需要将重物运输至高压电箱处时,将储物箱7安装于导轨4上且位于第一安装板5的下方,将储物箱7的挂板71在竖直平面内旋转,直至挂钩53穿过腰形孔711,可向储物箱7内放置维修需要用到的工具或需要更换的器件,通过伺服电机65驱动第二转轴62和第二同步带轮64旋转,以驱动同步带66转动,同步带66转动过程中,通过固定块661推动连接板51和第一安装板5沿导轨4 上升,第一安装板5在上升过程中通过挂板71和挂钩53的配合,带动储物箱7 一同跟随第一安装板5沿导轨4上升,直至储物箱7上升至高压电箱旁,完成工具或需要更换的器件的输送。
59.以上所述为本发明最佳实施方式的举例,其中未详细述及的部分均为本领域普通技术人员的公知常识。本发明的保护范围以权利要求的内容为准,任何基于本发明的技术启示而进行的等效变换,也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1