一种远心不动机构、驱动方法、机械手及手术机器人
1.本发明涉及一种远手术机器人,特别涉及一种远心不动机构、驱动方法、机械手及手术机器人,应用于医疗器械领域。
背景技术:
2.近年来,手术机器人在医疗领域发展迅速,与此同时微创手术在临床手术不断应用,并展现出其独有的优势比如:创口小,疼痛轻,手术精准度高,术后恢复快,为满足施展不同手术的操作需求,对手术机器人的手术精度、运动灵活性和操作便捷性等都提出了更高的要求,其中子宫切除术是一种在妇科中很常见的妇科手术,用于切除病人的子宫,在腹腔镜子宫切除术中,手术是通过腹腔镜的图像反馈进行的,一名助手会被指派从病床的床尾方向,将一根长杆器械通过阴道插入到子宫内,随时调整其位置和张力,以便外科医生进行手术动作,这个操作被称作举宫,长杆器械被称作举宫棒。然而,人工举宫的表现会随着时间的推移而下降,因为这项工作很繁琐,持续时间长,非常考验人的耐力。因此,需要开发一种能够克服上述问题的机器人来辅助医生进行手术。
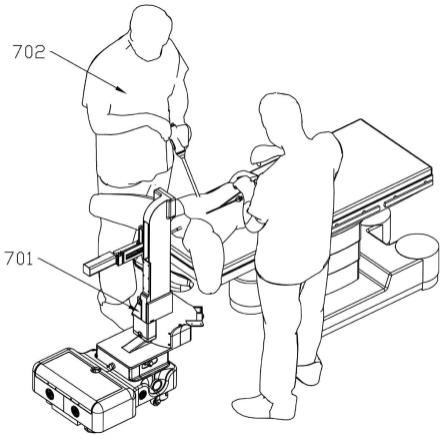
3.请参阅图1其展示了举宫机器人参与的腹腔镜子宫切除手术,主刀医生在进行一系列的手术动作,如夹持、切割和缝合病变组织,助手负责手持腹腔镜和操纵辅助器械,床尾的举宫机器人负责子宫的操作,由于人体的生理结构限制,举宫棒围绕着子宫的宫颈口进行运动对病人产生的损伤最小。
4.现有的机械手在不考虑多关节机械臂通过耦合运动实现soft rcm外,主要有下列几种结构形式:1.平面四边形机构综合构成的平面一个自由度rcm机构;2.弧形、球形rcm机构,转动副轴线通过机构的rcm点,弧形轨道中心轴与rcm点重合;3.基于相交平面的并联rcm机构。例如中国专利(公开号为201611169116.3)发明的不动点机构;中国专利(申请号为201910891985.4)发明的一种含闭环连杆的八自由度手术机械臂,其中平面四边形机构机架大,关节点薄弱,承载力弱,而弧形轨道中心轴与rcm点重合,弧形轨道需要一个扇形结构,为了实现转动半径较大的rcm,扇形结构占空间面积越大,稳定性也越差;并联机构复杂控制困难,例如中国专利(公开号为202210369547.3)发明的不动点机构、机械臂及手术机器人。
技术实现要素:
5.针对上述提到的现有技术中的远心不动机构的稳定性差;结构复杂控制困难的问题,本发明提供一种远心不动机构、驱动方法、机械手及手术机器人,其通过补偿驱动装置和旋转驱动装置实现绕远心不动点转动,其具有结构简单、稳定性高、操作方便的特点。
6.本发明解决其技术问题采用的技术方案是:一种远心不动机构,所述远心不动机构包括补偿驱动装置和旋转驱动装置,所述补偿驱动装置的旋转端与所述旋转驱动装置活动连接,所述补偿驱动装置的移动端能够朝着不动点方向进行伸缩,所述旋转驱动装置用于驱动所述补偿驱动装置以产生绕不动点的摆动。
7.进一步地,所述旋转驱动装置与所述补偿驱动装置铰接。
8.进一步地,所述旋转驱动装置包括至少一个第一直线运动组件,所述第一直线运动组件与所述补偿驱动装置铰接,第一直线运动组件与所述补偿驱动装置之间铰接的铰接点沿着第一直线运动组件平动,第一直线运动组件以驱动补偿驱动装置绕不动点旋转,所述补偿驱动装置的移动端在所述第一直线运动组件与所述补偿驱动装置之间铰接的铰接点与不动点的连线上伸缩。
9.进一步地,所述旋转驱动装置包括一个第一直线运动组件,所述第一直线运动组件包括一个以上轨道和在轨道上滑动的两个滑块,所述两个滑块相对设置,补偿驱动装置包括一个第二直线运动组件,所述第二直线运动组件包括至少一个轨道和在轨道上滑动的滑块,以及在轨道上滑动的活动块,第一直线运动组件的一个滑块与所述第二直线运动组件的滑块直接或间接铰接,第一直线运动组件的另一个滑块与所述第二直线运动组件的轨道直接或间接铰接。
10.进一步地,所述旋转驱动装置包括至少两个第一直线运动组件,补偿驱动装置包括一个第二直线运动组件,所述第一直线运动组件包括至少一个轨道和在轨道上滑动的滑块,所述第二直线运动组件包括至少一个轨道和在轨道上滑动的滑块,以及在轨道上滑动的活动块,一个第一直线运动组件的滑块与所述第二直线运动组件的滑块直接或间接铰接,另一个第一直线运动组件的滑块与所述第二直线运动组件的轨道直接或间接铰接。
11.进一步地,所述第二直线运动组件为两个以上轨道时,所述轨道之间为平行,滑块在其中的一个轨道滑动,所述活动块在另一个轨道滑动。
12.进一步地,所述旋转驱动装置包括两个第一直线运动组件,补偿驱动装置包括一个第二直线运动组件,所述第一直线运动组件包括一个轨道和在轨道上滑动的滑块,所述第二直线运动组件包括一个轨道和在轨道上滑动的滑块,以及在轨道上滑动的活动块,一个第一直线运动组件的滑块与所述第二直线运动组件的滑块铰接,另一个第一直线运动组件的滑块与所述第二直线运动组件的轨道铰接。
13.进一步地,两个第一直线运动组件中靠近不动点的第一直线运动组件的滑块与第二直线运动组件的轨道一端铰接,第二直线运动组件的滑块在第二直线运动组件的轨道另一端滑动,两个第一直线运动组件中远离不动点的第一直线运动组件的滑块与第二直线运动组件的滑块铰接,或者是两个第一直线运动组件中远离不动点的第一直线运动组件的滑块与第二直线运动组件的轨道一端铰接,第二直线运动组件的滑块在第二直线运动组件的轨道另一端滑动,两个第一直线运动组件中靠近不动点的第一直线运动组件的滑块与第二直线运动组件的滑块铰接。
14.进一步地,所述旋转驱动装置包括两个第一直线运动组件,补偿驱动装置包括一个第二直线运动组件,所述第一直线运动组件包括一个轨道和在轨道上滑动的滑块,所述第二直线运动组件包括两个轨道和在其中一个轨道上滑动的滑块,以及在另一个轨道上滑动的活动块,两个轨道之间平行设置,一个第一直线运动组件的滑块与所述第二直线运动组件的滑块铰接,另一个第一直线运动组件的滑块与所述第二直线运动组件的设有活动块的轨道铰接。
15.进一步地,两个第一直线运动组件中靠近不动点的第一直线运动组件的滑块与第二直线运动组件的设有活动块的轨道铰接,两个第一直线运动组件中远离不动点的第一直
线运动组件的滑块与第二直线运动组件的滑块铰接,或者是两个第一直线运动组件中远离不动点的第一直线运动组件的滑块与第二直线运动组件的设有活动块的轨道铰接,两个第一直线运动组件中靠近不动点的第一直线运动组件的滑块与第二直线运动组件的滑块铰接。
16.进一步地,一个第一直线运动组件的滑块与所述第二直线运动组件的一个滑块直接或间接铰接的铰接点,以及另一个第一直线运动组件的滑块与所述第二直线运动组件的一个轨道直接或间接铰接的铰接点的连线,与不动点共线。
17.进一步地,所述旋转驱动装置的两个第一直线运动组件设置在相对于所述补偿驱动装置的同一侧面。
18.进一步地,所述旋转驱动装置的两个第一直线运动组件分别设置在所述补偿驱动装置的一侧。
19.进一步地,所述旋转驱动装置为两个输出等比例的直线运动的第一直线运动组件,同时以第一速度值和第二速度值的移动,第一速度值与所述第二速度值的比值保持不变。
20.进一步地,所述补偿驱动装置的移动后相对于初始位置的位移量为δt,满足方式其中s为不动点与第一直线运动组件的滑块与第二直线运动组件的一个轨道直接的铰接点的初始位置时的距离,δn为铰接点的移动后相对于初始位置的位移量。
21.本发明解决其技术问题还采用的技术方案是:一种远心不动机构的驱动方法,所述驱动方法包括第一移动副、第二移动副和第三移动副,所述第一移动副和第二移动副平动,所述第一移动副和第二移动副驱动所述第三移动副以产生绕不动点的摆动。
22.本发明解决其技术问题还采用的技术方案是:一种机械手,所述机械手包括机械手支架和上述的远心不动机构,所述远心不动机构设置在所述机械手支架上。
23.本发明解决其技术问题还采用的技术方案是:一种手术机器人,所述手术机器人包括机械手支架和上述的远心不动机构,所述远心不动机构设置在所述机械手支架上。
24.本发明的有益效果:本发明提供了一种远心不动机构、驱动方法、机械手及手术机器人,本发明还具有如下优点:
25.(1)远心不动机构通过补偿驱动装置和旋转驱动装置实现绕远心不动点转动,其具有结构简单、稳定性高、操作方便的特点。
26.(2)通过旋转驱动装置采用以上一个直线运动组件平动,补偿驱动装置的补偿移动,实现绕远心不动点转动,其具有结构简单特点,补偿驱动装置伸缩补偿方便。
27.(3)旋转驱动装置采用双直线运动组件结构,双直线运动组件等比例输出,补偿驱动装置和旋转驱动装置活动连接,以此达到方便计算补偿驱动装置的输出伸缩值,使不动点控制更加精准。
28.(4)补偿驱动装置的可以实现主动伸缩,实现两个自由度,即绕着远心不动点摆动,还有沿着远心不动点伸缩,医护人员使用更加方便,能够达到多种环境下使用。
29.(5)本发明采用较少的轨道和滑块实现绕着远心不动点摆动,相较于现有的远心不动点机构,实现原理简单,结构简单,且稳定性更好。
附图说明
30.图1是本发明提供的手术机器人的工作场景示意图。
31.图2是本发明提供的实施例一的远心不动机构的原理示意图。
32.图3是本发明提供的实施例一的远心不动机构的摆动原理示意图。
33.图4是本发明提供的实施例一的远心不动机构的伸出原理示意图。
34.图5是本发明提供的实施例一的远心不动机构的收缩原理示意图。
35.图6是本发明提供的实施例一的活动块的摆动原理示意图。
36.图7是本发明提供的实施例二的远心不动机构的原理示意图。
37.图8是本发明提供的实施例二的远心不动机构的摆动原理示意图。
38.图9是本发明提供的实施例三的远心不动机构的原理示意图。
39.图10是本发明提供的实施例四的远心不动机构的原理示意图。
40.图11是本发明提供的实施例五的远心不动机构的原理示意图。
41.图12是本发明提供的实施例六的远心不动机构的原理示意图。
42.图13是本发明提供的实施例七的远心不动机构的原理示意图。
43.图14是本发明提供的实施例八的远心不动机构的原理示意图。
44.图15是本发明提供的实施例九的远心不动机构的原理示意图。
45.图16是本发明提供的实施例十的远心不动机构的原理示意图。
46.图17是本发明提供的实施例十一的远心不动机构的原理示意图。
47.图18是本发明提供的实施例十二的远心不动机构的原理示意图。
48.图19是本发明提供的机械手的结构示意图。
49.图20是本发明提供的机械手的结构示意图。
50.附图标记:10-连接件,101-第一轨道,102-第一滑块,201-第二轨道,202-第二滑块,301-第三轨道,3011-第三轨道a,3012-第三轨道b,302-活动块,303-第三滑块,401-末端装置,402-第一夹持,403-第二夹持,501-机械手支架,502-第一同步带,503-第二同步带,504-第一主动同步带轮,505-第一惰轮,506-第二主动同步轮,507-第二惰轮,508-双轨道驱动电机,509-联轴器,510-刹车,511-第一锥齿轮,512-第二锥齿轮,513-转轴,514-第一轴承,515-第二轴承,515-第三轴承,516-同步带张紧螺钉,601-补偿驱动电机,602-齿轮,603-齿条,604-辅助导向杆,701-机器人主体,702-医护人员。
具体实施方式
51.为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
52.请参阅图1-20,针对现有的远心不动机构的稳定性差;结构复杂控制困难,本发明提供一种远心不动机构,心不动机构包括补偿驱动装置和旋转驱动装置,补偿驱动装置的旋转端与旋转驱动装置活动连接,其中活动连接优选的旋转驱动装置与补偿驱动装置铰接,实施中也可以采用其他连接方式,补偿驱动装置的移动端能够朝着不动点方向进行伸缩,旋转驱动装置用于驱动补偿驱动装置以产生绕不动点的摆动。其具有结构简单、稳定性
高、操作方便的特点。具体实施中,旋转驱动装置包括至少一个第一直线运动组件,第一直线运动组件与补偿驱动装置铰接,第一直线运动组件与补偿驱动装置之间铰接的铰接点沿着第一直线运动组件平动,第一直线运动组件以驱动补偿驱动装置绕不动点旋转,补偿驱动装置的移动端在第一直线运动组件与补偿驱动装置之间铰接的铰接点与不动点的连线上伸缩,即以连线为参考线进行平行或共线的移动,通过旋转驱动装置采用以上一个直线运动组件平动,补偿驱动装置的补偿移动,实现绕远心不动点转动,其具有结构简单特点,补偿驱动装置伸缩补偿方便,同时补偿驱动装置的可以进行主动伸缩,实现具有两个自由度,即绕着远心不动点摆动,还有沿着远心不动点方向伸缩,医护人员使用更加方便,能够达到多种环境下使用,以及在具体实施中,旋转驱动装置采用一个直线运动组件结构或者是双直线运动组件结构,其中双直线运动组件等比例输出,补偿驱动装置和旋转驱动装置活动连接,以此达到方便计算补偿驱动装置的输出伸缩值,使不动点控制更加精准。
53.为方便阅读实施例中的附图标记,附图中d为补偿驱动装置摆动后的位置;d0为补偿驱动装置的初始位置;d1为补偿驱动装置摆动后的第一个特定位置;d2为补偿驱动装置摆动后的第二个特定位置,需要说明的是,补偿驱动装置的摆动后的位置d也包括补偿驱动装置的初始位置d0。
54.实施例一,请参阅2-6,旋转驱动装置包括两个第一直线运动组件,两个第一直线运动组件的设置在相对于补偿驱动装置的同一侧面。第一直线运动组件a包括第一轨道101和在第一轨道101上滑动的第一滑块102,第一直线运动组件a靠近不动点,第一直线运动组件b包括第二轨道201和在第二轨道201上滑动的第二滑块202,第一直线运动组件b远离不动点,第一轨道101与第二轨道201平行或共线,第一滑块102在第一轨道101上移动,第二滑块202在第二轨道201上移动。补偿驱动装置包括第二直线运动组件,第二直线运动组件包括第三轨道上403和在第三轨道上403上滑动的活动块302和第三滑块303。具体实施中,旋转驱动装置的两个第一直线运动组件分别设置在补偿驱动装置的一侧,即第二直线运动组件设置在第一直线运动组件a和第一直线运动组件b之间,例如图12-13所示位于同一侧,或者是例如图14-15所示位于第一直线运动组件a和第一直线运动组件b之间,分别设置一侧相对于同一侧面结构更加复杂。
55.具体实施中,两个第一直线运动组件中靠近不动点的第一直线运动组件a的第一滑块102与第二直线运动组件的第三轨道301一端铰接,第二直线运动组件的第三滑块303在第二直线运动组件的第三轨道301另一端滑动,两个第一直线运动组件中远离不动点的第一直线运动组件b的第二滑块202与第二直线运动组件的第三滑块303铰接。简单的说,第一滑块102与第三轨道301铰接,铰接点称作第一铰接点,第二滑块202与第三滑块303铰接,铰接点称作第二铰接点。
56.本实施例中的第三轨道301和第三滑块303分别与第一滑块102和第二滑块202的连接处定义为补偿驱动装置的旋转端,活动块302定义为补偿驱动装置的活动端。
57.活动块302在第三轨道301上移动,第三滑块303在第三轨道301上移动,第一滑块102与第二直线运动组件的第三轨道301铰接,第二滑块202通过第三滑块303间接与第二直线运动组件的第三轨道301铰接,活动块302的移动方向时刻与第一铰接点、第二铰接点的连线平行或共线。即第一滑块102和第二滑块202与补偿驱动装置的两个的铰接点,与补偿驱动装置的伸缩方向平行或共线,即补偿驱动装置的活动块302移动方向平行或共线。
58.第三滑块的移动方向时刻与第一铰接点、第二铰接点的连线平行或共线。
59.图2-5中的点r为空间中不动点。
60.末端装置401与活动块302固定连接,随着活动块302移动而移动。
61.图2-5中的点f为末端组件上固定一点,且f与第一铰接点、第二铰接点共线。即第一直线运动组件a的滑块与第二直线运动组件的一个滑块直接或间接铰接的铰接点,以及第一直线运动组件b的滑块与第二直线运动组件的一个轨道直接或间接铰接的铰接点的连线与不动点共线,补偿驱动装置的活动端的伸缩方向与两个铰接点的连线平行或共线。需要说明的是本发明中的直接铰接为部件与部件的直接连接,或者是部件与部件之间通过刚性连接件进行连接,例如图2所示的铰接,或者是图9所示的通过连接件实现的铰接,其间接连接为部件与部件通过移动或活动的活动件构成的连接关系,例如传动电机,差速器等零部件构成的连接关系。
62.其中,第一滑块102、第二滑块202和活动块302会被主动驱动,第三滑块303不会被主动驱动。
63.在补偿驱动装置摆动后的位置d时,第一铰接点与点m重合,第二铰接点与点n重合;
64.需要说明的时,在补偿驱动装置初始位置d0时,第一铰接点与点m0重合,第二铰接点与点n0重合,即铰接点m0与铰接于点n0的连线与第一轨道101和第二轨道201垂直。
65.补偿驱动装置位于初始位置d1时,第一铰接点与点m1重合,第二铰接点与点n1重合。
66.补偿驱动装置位于初始位置d2时,第一铰接点与点m2重合,第二铰接点与点n2重合。
67.在初始位置d0时,r与f重合。即在补偿驱动装置摆动后的位置d0时,f与m,n共线。
68.本实施例中,提供一种补偿驱动装置的伸缩量的计算方法,在第一滑块102的移动速度为v1,即为第一速度值,第二滑块202的移动速度为v2,即为第二速度值,活动块302的移动速度为v3,即为第三速度值。
69.在补偿驱动装置摆动后位置d时,
70.第一滑块102沿移动方向相对于初始位置的位移量为δa,即第一直线运动组件的滑块与第二直线运动组件的一个轨道直接或间接铰接的铰接点的移动后相对于初始位置的位移量δn,也即铰接点m相对于初始铰接点m0的位移量。
71.第二滑块202沿移动方向相对于初始位置的位移量为δb,也即铰接点n相对于初始铰接点n0的位移量。
72.活动块302沿移动方向相对于初始位置的位移量为δc,即补偿驱动装置的移动后相对于初始位置的位移量为δt,也即fm相对于fm0的增加量。
73.需要说明的是,其中fm代表点f与点m之间的距离,fm0代表点f与点m0之间的距离。
74.需要说明的是后续文中两个字母的组合均代表距离。
75.l1是点r与点m0之间的距离,即不动点与第一直线运动组件的滑块与第二直线运动组件的一个轨道直接或间接铰接的铰接点的初始位置时的距离s,l2是点r与点n0之间的距离,故l1=rm0,l2=rn0。
76.其中,t为时间。
77.当时,可得即因此r、m和n共线。故,旋转驱动装置的两个输出等比例的直线运动的第一直线运动组件,同时以第一速度值和第二速度值的移动,第一速度值与第二速度值的比值保持不变。
78.且因为f已经和m、n共线,所以r、f、m和n四点共线。
79.当时,即为即因为共线且长度相等,所以必定重合,因此r与f重合。
80.此时t为时间。
81.第一滑块102和第二滑块202的移动可以通过速度指令进行控制,即第一滑块102和第二滑块202被施加速度指令保持两者的速度是进行运动,也可以是被施加位置指令,使其移动距离保持k的可选值位于0到1之间,不包含0和1,当k值越小时,不动点r离第一轨道1的距离越近;当k值越大时,不动点r离所述第一轨道1的距离越远。
82.活动块302的移动同样可以通过速度指令进行控制,即满足进行运动,也可以是被施加位置指令,使其移动距离保持
83.因此,满足以上条件时,末端装置401摆动的过程中始终保持固定的远端不动点,即保持固定点f与空间不动点r重合。
84.需要说明的是,当v1=v2=0且v3≠0时,末端装置401通过活动块302在第三轨道301上面左右移动。
85.当则为末端组件绕不动点r进行旋转的同时,末端装置401上固定点f在m、n和不动点r连成的直线上左右移动。此情况分为两种,一种当时,即可实现末端装置401绕不动点旋转的同时,固定点f在m、n和不动点r连成的直线方向上向左移动。末端装置401上的固定点f在不动点r,m,n的连线方向上左给进,即图4中点f’为末端组件上固定一点过不动点r。
86.另一种当时,即可实现末端装置401绕不动点旋转的同时,固定点f在m、n和不动点r连成的直线上方向上向右移动。末端装置401上的固定点f在不
动点r,m,n的连线方向上右给进。即图5中f”为末端组件上固定一点不过不动点r。
87.还需要说明的是,图中第三滑块303位置不代表实际位置,实际中可根据需求设置;图中第一轨道101、第二轨道201、第一滑块102、第二滑块202、第一铰接点、第二铰接点位置并不代表实际位置,只表明原理。
88.附图中末端装置401形状不代表实际形状,实际中可根据需求设计。
89.请参阅图7-8,实施例二,相较于实施一,第一直线运动组件a包括第一轨道101和在第一轨道101上滑动的第一滑块102,第一直线运动组件b包括第二轨道201和在第二轨道201上滑动的第二滑块202,第一轨道101与第二轨道201平行,第一滑块102在第一轨道101上移动,第二滑块202在第二轨道201上移动。补偿驱动装置包括第二直线运动组件,第二直线运动组件包括活动块302和在第三轨道上403上滑动的活动块302和第三滑块303。
90.具体实施中,两个第一直线运动组件中远离不动点的第一直线运动组件b的第二滑块202与第二直线运动组件的第三轨道301一端铰接,第二直线运动组件的第三滑块303在第二直线运动组件的第三轨道301另一端滑动,两个第一直线运动组件中靠近不动点的第一直线运动组件a的第一滑块102与第二直线运动组件的第三滑块303铰接,简单的说,第一滑块102与第三滑块303铰接,铰接点称作第一铰接点,第二滑块202与第三轨道301铰接,铰接点称作第二铰接点。
91.本实施例中的第三轨道301和第三滑块303分别与第一滑块102和第二滑块202的连接处定义为补偿驱动装置的旋转端,活动块302定义为补偿驱动装置的活动端。
92.第二滑块202沿移动方向相对于初始位置的位移量为δb,即第一直线运动组件的滑块与第二直线运动组件的一个轨道直接或间接铰接的铰接点的移动后相对于初始位置的位移量δn,也即铰接点n相对于初始铰接点n0的位移量。
93.活动块302沿移动方向相对于初始位置的位移量为δd,即补偿驱动装置的移动后相对于初始位置的位移量为δt,也即fn相对于fn0的增加量。
94.l2是点r与点n0之间的距离,即不动点与第一直线运动组件的滑块与第二直线运动组件的一个轨道直接或间接铰接的铰接点的初始位置时的距离s,故l2=rn0。
95.与实施一的计算原理一样,可以计算出活动块302的移动速度为v3,活动块302由初始点移动的距离为δd,t为时间。即为
96.以上仅针对与实施例一不同的地方进行描述,对于相同之处不再进行展开说明并请参阅实施例一。
97.实施例三,请参图9,相较于实施例一,其第一直线运动组件a的第一滑块102通过连接件10与第二直线运动组件的第三轨道301一端铰接,第一直线运动组件b的第二滑块202通过连接件10与第二直线运动组件的第三滑块303铰接,且活动块块302的移动方向与两个第一直线运动组件与第二直线运动组件之间铰接的铰接点与不动点的连线为共线关系,具有结构稳定性强,能够用于不同的应用场景下。以上仅针对与实施例一不同的地方进行描述,对于相同之处不再进行展开说明并请参阅实施例一。
98.实施例四,请参图10,相较于实施例三,其铰接点发生改变,具体为第一直线运动
组件a的第一滑块102通过连接件10与第二直线运动组件的第三滑块303铰接,第一直线运动组件b的第二滑块202通过连接件10与第二直线运动组件的轨道301铰接一端铰接。以上仅针对与实施例三不同的地方进行描述,对于相同之处不再进行展开说明并请参阅实施例三。
99.实施例五,请参图11,相较于实施例三,其活动块块302的移动方向与两个第一直线运动组件与第二直线运动组件之间铰接的铰接点与不动点的连线为平行关系。以上仅针对与实施例三不同的地方进行描述,对于相同之处不再进行展开说明并请参阅实施例三。
100.实施例六,请参图12,相较于实施例四,其活动块块302的移动方向与两个第一直线运动组件与第二直线运动组件之间铰接的铰接点与不动点的连线为平行关系。以上仅针对与实施例四不同的地方进行描述,对于相同之处不再进行展开说明并请参阅实施例四。
101.实施例七,请参图13,相较于实施例一,第二直线运动组件为两个以上轨道时,即可以理解为第三轨道a3011和第三轨道b3012两段,第三轨道a3011和第三轨道b3012之间为平行关系,也可以为共线关系,即可以看作实施例一中的第三轨道301,两个第一直线运动组件a中靠近不动点的第一直线运动组件的第一滑块102与第二直线运动组件的设有活动块302的第三轨道a3011铰接,也可以采用通过连接件10铰接,两个第一直线运动组件中远离不动点的第一直线运动组件b的第二滑块202与第二直线运动组件的第三滑块303铰接,也可以采用通过连接件10铰接,以上仅针对与实施例一不同的地方进行描述,对于相同之处不再进行展开说明并请参阅实施例一。
102.实施例八,请参阅图14,相较于实施例七,两个第一直线运动组件中远离不动点的第一直线运动组件b的第二滑块202与第二直线运动组件的设有活动块302的第三轨道b铰接,两个第一直线运动组件a中靠近不动点的第一直线运动组件的第一滑块102与第二直线运动组件的第三滑块303铰接,连接位置发生变化,以上仅针对与实施例七不同的地方进行描述,对于相同之处不再进行展开说明并请参阅实施例七。
103.实施例九,请参图15,本实施例中,旋转驱动装置包括一个第一直线运动组件,第一直线运动组件包括一个以上轨道和在轨道上滑动的两个滑块,两个滑块相对设置,补偿驱动装置包括一个第二直线运动组件,所述第二直线运动组件包括至少一个轨道和在轨道上滑动的滑块,以及在轨道上滑动的活动块,第一直线运动组件的一个滑块与第二直线运动组件的滑块直接或间接铰接,第一直线运动组件的另一个滑块与第二直线运动组件的轨道直接或间接铰接。相较于实施例一,第一轨道101与第二轨道201为一条轨道,采用一个直线运动组件,第一滑块102和第二滑块202分别在轨道滑动,第一滑块102在第二滑块202的上方位置处,第一滑块102与第二直线运动组件的第三轨道301铰接,第二滑块202与第二直线运动组件的第三滑块303直接或间接铰接,在第一滑块102和第二滑块202带动下补偿驱动装置呈圆周运动,如此配置,可节省一个导轨,简化结构,可以应用于口腔手术设备中,但存在摆动角度减小的缺点。
104.实施例十,请参图16,相较于实施例九,同样是第一滑块102在第二滑块202的上方位置处,第一滑块102与第二直线运动组件的第三滑块303直接或间接铰接,第二滑块202与第二直线运动组件的第三轨道301,铰接位置发生变化,在第一滑块102和第二滑块202带动下补偿驱动装置呈圆周运动。以上仅针对与实施例九不同的地方进行描述,对于相同之处不再进行展开说明并请参阅实施例九。
105.实施例十一,请参阅图17,相较于实施例七,第一轨道101与第二轨道201为一条轨道,采用一个直线运动组件,具体实施原理与实施例九相同,在此不做赘述。
106.实施例十二,请参阅图18,相较于实施例八,第一轨道101与第二轨道201为一条轨道,采用一个直线运动组件,具体实施原理与实施例九相同,在此不做赘述。
107.本发明还提供一种远心不动机构的驱动方法,驱动方法包括第一移动副、第二移动副和第三移动副,第一移动副和第二移动副平动,第一移动副和第二移动副驱动第三移动副以产生绕不动点的摆动。
108.具体实施中第一移动副和第二移动副协同工作可以理解为旋转驱动装置的两个滑块,移动副可以理解为补偿驱动装置的活动块,例如在实施例一至八中,旋转驱动装置包括至少两个第一直线运动组件,补偿驱动装置包括一个第二直线运动组件,第一直线运动组件包括至少一个轨道和在轨道上滑动的滑块,第二直线运动组件包括至少一个轨道和在轨道上滑动的滑块,以及在轨道上滑动的活动块,一个第一直线运动组件的滑块与所述第二直线运动组件的滑块直接或间接铰接,另一个第一直线运动组件的滑块与所述第二直线运动组件的轨道直接或间接铰接,其中第二直线运动组件为两个以上轨道时,轨道之间为平行轨道,滑块在共线轨道中的一个轨道滑动,活动块在另一个轨道滑动,以此实现旋转驱动装置平动驱动补偿驱动装置绕不动点摆动,在实施例九至十二中,旋转驱动装置包括一个第一直线运动组件,第一直线运动组件包括一个以上轨道和在轨道上滑动的两个滑块,补偿驱动装置包括一个第二直线运动组件,第二直线运动组件包括至少一个轨道和在轨道上滑动的滑块,以及在轨道上滑动的活动块,亦可以通过旋转驱动装置平动驱动补偿驱动装置绕不动点摆动。
109.请参阅图19-20,本发明还提供一种机械手,机械手包括机械手支架和上述的远心不动机构,还包括用于驱动远心不动机构的运动的驱动机构,驱动机构包括补偿运动装置和旋转运动装置,旋转运动装置设置在机械手支架501内,旋转运动装置包括对应着第一直线运动组件a设置的第一主动同步带轮504和第一惰轮505,以及对应着第一直线运动组件b的第二主动同步带轮506和第二惰轮507,其中第一惰轮505和第二惰轮507活动设置在机械手支架501顶部,第一主动同步带轮504和第二主动同步带轮506通过转轴513设置在机械手支架501底部,第一主动同步带轮504和第一惰轮505通过第一同步带502连接,第二主动同步带轮506和第二惰轮507通过第二同步带503连接,转轴513上套设有第一锥齿轮511,双轨道驱动电机508上安装有第二锥齿轮512,第一锥齿轮511与第二锥齿轮512啮合,在双轨道驱动电机508的运动下,带动第一同步带502和第二同步带503运动,其中第一滑块102与第一同步带502固定连接,第二滑块202与第二同步带503固定连接,使得第一滑块102与第二同步带503同步移动,其中第一主动同步带轮504齿数为n1和第二主动同步带轮506齿数为n2,n1与n2满足关系n1/n2=k,当k为指定值时,即上述的实施例一中k值。
110.补偿运动装置的第二直线运动组件在第三轨道301上,补偿运动装置包括补偿驱动电机601、齿轮602和齿条603,齿轮602设置在补偿驱动电机601上,补偿驱动电机601设置在第三轨道301上,齿条603设置在活动块302外侧,或者是活动块302上有齿条603,齿轮602与齿条603啮合,在补偿驱动电机601的驱动下,齿条603的移动带动活动块302的移动,实现补偿驱动装置伸缩运动。
111.末端装置401与补偿驱动装置上远离旋转驱动装置的一端固定连接,即末端装置
401与补偿驱动装置的移动端固定连接,也就是说与活动块302连接,可以为固定安装或可拆卸安装方式,末端装置401还包括有第一夹持402和第二夹持403,末端装置401通过第一夹持402和第一夹持403与活动块302的两端固定。补偿运动装置还包括辅助导向杆604,辅助导向杆604平行与第三轨道301设置,辅助导向杆604的两端分别与第一夹持402和第二夹持403固定,且齿条603的两端分别与第一夹持402和第二夹持403连接,便于增加末端装置401移动的稳定性。
112.本实施例中,双轨道驱动电机508通过联轴器509与第二锥齿轮512连接。联轴器509与第二锥齿轮512之间设有刹车510,刹车510为用于控制速度或停止双轨道驱动电机508运动的控制组件,现有常规的机械控制组件。
113.本实施例中,转轴513上设有用于与手术机器人的主体连接的第一轴承514、第二轴承515和第三轴承515,将机械手支架安装在手术机器人的主体上。
114.本实施例中,因第一同步带502和第二同步带503的线速度不同,第三轨道301通过转动轴承与第一滑块102连接,使得第三轨道301能相对于第三轨道301转动,同理,第三滑块303转动轴承与第二滑块202连接,使得第三滑块303能相对于第二滑块202转动,末端装置401随第三轨道301旋转摆动。此过程中,第三滑块303在第三轨道301上移动,末端装置401过两个轴承轴线投影点始终连线上的一点通过不动点。
115.需要说明的是,将转轴513也可以采用双轴,用两个电机分别驱动第一主动同步带轮504和第二主动同步带轮506,满足上述的调节电机转速比k既可以。其中采用直线驱动方式,还不限于上述提到的电机驱动,也可以采用其他实现方式包括气缸、油缸等,其中同步带,亦可以采用丝杠、链条等。还需要说明的是,采用不同的远心不动机构,其机械手的结构有不同,本实施例中,为针对实施例一的远心不动机构的驱动进行说明。
116.请参阅图1,本发明还提供一种手术机器人,其中手术机器人包括机械手和上述的远心不动机构,所述远心不动机构设置在所述机械手支架上,手术机器人还包括上述的机器人主体701,机械手安装在机器人主体701上,机器人主体701上设有用于控制机械手和远心不动机构的控制按键,以便于驱动远心不动机构运动,方便医护人员702操作使用。
117.本专利主要描述实现远端不动点的几何原理,不限制可实现原理的机械结构具体构成,应用举例辅助说明原理,并非唯一实现途径。
118.应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1